基于神经网络的建筑施工工序优化方法、设备及介质与流程
1.本发明涉及建筑施工技术领域,尤其是涉及基于神经网络的建筑施工工序优化方法、设备及介质。
背景技术:
2.近年来,我国的建筑业发展十分迅速,装配式建筑在20世纪初就开始引起人们的兴趣,到六十年代终于实现。由于装配式建筑的建造速度快,而且生产成本较低,迅速在世界各地推广开来。
3.装配式建筑是指把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用构件和配件(如楼板、墙板、楼梯、阳台等),运输到建筑施工现场,通过可靠的连接方式在现场装配安装而成的建筑。
4.在装配式建筑业长期发展的过程中,存在工期延长、成本超标、过量排放等问题,因此如何综合优化装配式建筑的施工工序在绿色建筑中显得越来越重要。
5.在2019年08月16日申请的申请号为201910756922.8的中国发明,涉及一种基于建筑信息模型的施工进度资源自动优化方法,其包括以下步骤:准备具备建筑元素类别以及主资源类别的建筑信息模型,并在工作包模板数据库中添加必要信息,形成若干需要的工作包模板;以建筑构件类型以及材料类型为基础进行数据集成;利用rcpsp的约束条件和目标函数,生成进度资源优化模型,并求解,完成施工进度资源的优化。本发明能大幅提升数据整合、施工优化的效率,将施工方案优化的时间缩短,从几天降低到几小时。
技术实现要素:
6.为解决上述问题,本发明提供基于神经网络的建筑施工工序优化方法,合理优化施工工序,控制施工工期、成本、过量排放等问题。
7.本发明是通过以下技术方案予以实现:
8.本发明提供了基于神经网络的建筑施工工序优化方法,所述方法包括如下步骤:
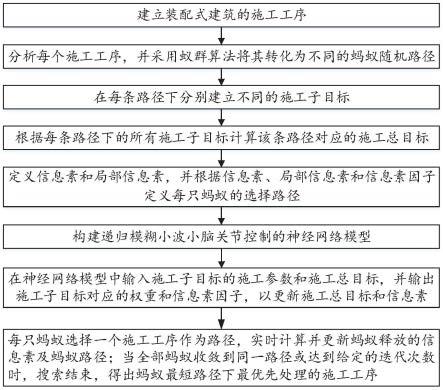
9.步骤1、建立装配式建筑的施工工序;
10.步骤2、分析每个施工工序,并采用蚁群算法将其转化为不同的蚂蚁随机路径;
11.步骤3、在每条路径下分别建立不同的施工子目标;
12.步骤4、根据每条路径下的所有施工子目标计算该条路径对应的施工总目标;
13.步骤5、定义信息素和局部信息素,并根据信息素、局部信息素和信息素因子定义每只蚂蚁的选择路径;
14.步骤6、构建递归模糊小波小脑关节控制的神经网络模型;
15.步骤7、在神经网络模型中输入施工子目标的施工参数和施工总目标,并输出施工子目标对应的权重和信息素因子,以更新施工总目标和信息素;
16.步骤8、每只蚂蚁选择一个施工工序作为路径,实时计算并更新蚂蚁释放的信息素及蚂蚁路径;当全部蚂蚁收敛到同一路径或达到给定的迭代次数时,搜索结束,得出蚂蚁最
短路径下最优先处理的施工工序。
17.进一步的,所述步骤1具体包括:
18.所述装配式建筑的施工工序分为以下过程:土地构件入场及检查、架设装备支撑、基层与施工面清理、预埋件布置、叠合板吊装运输、叠合板安装就位、灌浆作业、节点保护以及现场清理。
19.进一步的,所述步骤2具体包括:
20.分析装配式建筑的每个施工工序的施工模式,分为正常模式、赶工模式和节约模式三种,根据每个施工工序所选择的施工模式不同,采用蚁群算法将每个施工工序转化为对应的蚂蚁随机路径。
21.进一步的,所述步骤3具体包括:
22.根据每只蚂蚁所选择的路径建立每条路径对应的施工子目标,一个施工子目标分为工期子目标、成本子目标、安全子目标、排放子目标和质量子目标。
23.进一步的,所述步骤4具体包括:
24.根据每个施工子目标中各子目标的具体标准和各子目标的权重值计算对应的施工总目标为:
[0025][0026]
其中,a是加权计算后的施工总目标;m1是工期子目标的权重值,m2是成本子目标的权重值,m3是安全子目标的权重值,m4是排放子目标的权重值,m5是质量子目标的权重值;a1是工期子目标,a2是成本子目标,a3是安全子目标,a4是排放子目标,a5是质量子目标。
[0027]
进一步的,所述步骤5具体包括:
[0028]
步骤51、构建当前蚂蚁完成一次路径搜索后所释放的信息素:
[0029][0030]
其中,k代表第k只蚂蚁,i代表当前施工工序所采用的第i个施工模式,j代表下一个施工工序所采用的第j个施工模式,q表示蚂蚁完成一次路径搜索后所释放的信息素总量,f(n)为第n个循环的综合目标值;
[0031]
步骤52、构建所有蚂蚁完成一次路径搜索后所释放的的信息素:
[0032][0033]
其中,m表示蚂蚁数;
[0034]
步骤53、定义信息素的更新信息为:
[0035][0036]
其中,表示第m时刻的信息素,表示第m+1时刻的信息素;
[0037]
步骤54、构建局部信息素:
[0038][0039]
其中,角标t,d,s,p和z分别表示工期、成本、安全、排放和质量;max和min分别表示最大值和最小值,r是偏置量,ω代表权重值;
[0040]
步骤55、根据信息素、局部信息素和信息素因子构建每只蚂蚁的选择路径公式如下:
[0041][0042]
其中,符号τ
ij
和φ
ij
分别代表当前施工工序所采用的第i个施工模式和下一个施工工序所采用的第j个施工模式的信息素和局部信息素;f代表第f个施工模式,a和b代表信息素因子;
[0043]
步骤56、计算出每只蚂蚁的选择路径如下:
[0044][0045]
其中,j代表下一个工序是采用第j个施工模式,p0是预设值。
[0046]
进一步的,所述步骤6具体包括:
[0047]
步骤61、构建递归模糊小波小脑关节控制的神经网络模型,所述神经网络模型有五个空间,分别为:
[0048]
输入空间:x=[x1,x2,x3,x4,x5,x6]
t
,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0049]
其中,x表示神经网络模型的输入,x1表示工期,x2表示成本,x3表示安全,x4表示排放,x5表示质量,x6表示施工总目标a,t表示矩阵的转置;
[0050]
成员函数空间:
[0051]
其中,μ
ijk
(xi)是成员函数,d
ijk
和c
ijk
是权重,随着迭代循环而优化;
[0052]
规则空间:
[0053]
其中,是规则,∏是累乘符号,θ
ijk
是更新的权重值;
[0054]
模糊空间:
[0055]
其中,是模糊,是权重值;
[0056]
输出空间:
[0057]
其中,y是神经网络模型的输出;
[0058]
步骤62、所述神经网络模型自身的参数d
ijk
、c
ijk
、和θ
ijk
采用梯度下降法进行优化。
[0059]
进一步的,所述步骤7具体包括:
[0060]
在该神经网络模型中依次输入每个施工子目标的施工参数,更新迭代次数,并输出施工子目标对应的权重和信息素因子,采用递归模糊小波小脑关节控制的神经网络模型对子目标的权重值与信息素因子进行迭代优化;
[0061]
所述神经网络模型的优化结果如下:
[0062]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x1,x6]
t
,输出是工期子目标的权重值m1;
[0063]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x2,x6]
t
,输出是成本子目标的权重值m2;
[0064]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x3,x6]
t
,输出是安全子目标的权重值m3;
[0065]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x4,x6]
t
,输出是排放子目标的权重值m4;
[0066]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x5,x6]
t
,输出是质量子目标的权重值m5;
[0067]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x2,x3,x4,x5,x6]
t
,输出是信息素因子a;
[0068]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x2,x3,x4,x5,x6]
t
,输出是信息素因子b;
[0069]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x6]
t
,输出是工期的权重值ω
t
;
[0070]
递归模糊小波小脑关节控制的神经网络模型的输出是成本的权重值ωd,输入是[x2,x6]
t
;
[0071]
递归模糊小波小脑关节控制的神经网络模型的输入是[x3,x6]
t
,输出是安全的权重值ωs;
[0072]
递归模糊小波小脑关节控制的神经网络模型的输入是[x4,x6]
t
,输出是排放的权重值ω
p
;
[0073]
递归模糊小波小脑关节控制的神经网络模型的输入是[x5,x6]
t
,输出是质量的权重值ωz。
[0074]
本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述的基于神经网络的建筑施工工序优化方法。
[0075]
本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述的基于神经网络的建筑施工工序优化方法。
[0076]
本发明的有益效果是:
[0077]
本发明结合了递归模糊小波小脑关节控制的神经网络模型和蚁群算法,
[0078]
实现装配式建筑施工工序的优化安排,合理优化施工工序,控制施工工期、成本、过量排放等问题。
附图说明
[0079]
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0080]
图1是本发明实施例提供的基于神经网络的建筑施工工序优化方法流程示意图。
[0081]
图2是本发明实施例提供的基于神经网络的建筑施工工序优化方法流程框图。
[0082]
图3是本发明实施例提供的一种电子设备的示意图。
[0083]
图4是本发明实施例提供的一种计算机可读存储介质的示意图。
具体实施方式
[0084]
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0085]
如图1和图2所示,本发明实施例提供了基于神经网络的建筑施工工序优化方法,所述方法包括如下步骤:
[0086]
步骤1、建立装配式建筑的施工工序;
[0087]
在本实施例中,该步骤具体包括:
[0088]
所述装配式建筑的施工工序分为以下过程:土地构件入场及检查、架设装备支撑、基层与施工面清理、预埋件布置、叠合板吊装运输、叠合板安装就位、灌浆作业、节点保护以及现场清理。同时,通过资料搜集与现场调研,能够获得装配式建筑施工每道工序的人工、材料、消耗、质量等情形。具体来说,装配式建筑施工的安装涉及到多目标的优化问题,具体表现为工期、成本、安全、排放、质量的综合优化目标。该步骤的目的是为了更好地对施工工序进行分类,确定出要优化的内容,并制定出优化目标和方案。
[0089]
步骤2、分析每个施工工序,并采用蚁群算法将其转化为不同的蚂蚁随机路径;
[0090]
在本实施例中,该步骤具体包括:
[0091]
分析装配式建筑的每个施工工序的施工模式,分为正常模式、赶工模式和节约模式三种,根据每个施工工序所选择的施工模式不同,采用蚁群算法将每个施工工序转化为对应的蚂蚁随机路径。对于不用的施工模式下,每个施工工序所要耗费的工期、承受的成本、碳排放、保证的质量有所不同。根据施工模式不同,制定出的优化目标和方案也会不一样,因此要先对每个施工工序的施工模式进行确定,才能对每个施工工序建立不同的施工
子目标,才能得到合理的施工方案。
[0092]
步骤3、在每条路径下分别建立不同的施工子目标;
[0093]
在本实施例中,该步骤具体包括:
[0094]
根据每只蚂蚁所选择的路径建立每条路径对应的施工子目标,一个施工子目标分为工期子目标、成本子目标、安全子目标、排放子目标和质量子目标。一条路径就是对应一个施工子目标,一个施工子目标根据施工模式对工期、成本、安全、排放和质量进行评估,制定出每个施工子目标特定的方案,为后期优化工序起到重要作用。
[0095]
步骤4、根据每条路径下的所有施工子目标计算该条路径对应的施工总目标;
[0096]
在本实施例中,该步骤具体包括:
[0097]
根据每个施工子目标中各子目标的具体标准和各子目标的权重值计算对应的施工总目标为:
[0098][0099]
其中,a是加权计算后的施工总目标;m1是工期子目标的权重值,m2是成本子目标的权重值,m3是安全子目标的权重值,m4是排放子目标的权重值,m5是质量子目标的权重值;a1是工期子目标,a2是成本子目标,a3是安全子目标,a4是排放子目标,a5是质量子目标。计算出施工总目标的目的是为后面神经网络模型的输入提供参数。
[0100]
步骤5、定义信息素和局部信息素,并根据信息素、局部信息素和信息素因子定义每只蚂蚁的选择路径;
[0101]
在本实施例中,该步骤具体包括:
[0102]
步骤51、构建当前蚂蚁完成一次路径搜索后所释放的信息素:
[0103][0104]
其中,k代表第k只蚂蚁,i代表当前施工工序所采用的第i个施工模式,j代表下一个施工工序所采用的第j个施工模式,q表示蚂蚁完成一次路径搜索后所释放的信息素总量,f(n)为第n个循环的综合目标值;
[0105]
信息素:蚂蚁在寻找实物过程中释放在所经过的路径上的物质。路径上的信息素的浓度收到两方面影响:蚁群中的单蚁在路经道路时,信息素不断的释放,其浓度不断积累,使得在某些重要路径上信息素的强度持续增大;另一方面,随着时间的推移,信息素在空气中不断会发,浓度将会缓慢减少。
[0106]
步骤52、构建所有蚂蚁完成一次路径搜索后所释放的的信息素:
[0107][0108]
其中,m表示蚂蚁数;
[0109]
步骤53、定义信息素的更新信息为:
[0110]
[0111]
其中,表示第m时刻的信息素,表示第m+1时刻的信息素;
[0112]
步骤54、构建局部信息素:
[0113][0114]
其中,角标t,d,s,p和z分别表示工期、成本、安全、排放和质量;max和min分别表示最大值和最小值,r是偏置量,ω代表权重值;
[0115]
步骤55、根据信息素、局部信息素和信息素因子构建每只蚂蚁的选择路径公式如下:
[0116][0117]
其中,符号τ
ij
和φ
ij
分别代表当前施工工序所采用的第i个施工模式和下一个施工工序所采用的第j个施工模式的信息素和局部信息素;f代表第f个施工模式,a和b代表信息素因子;
[0118]
步骤56、计算出每只蚂蚁的选择路径如下:
[0119][0120]
其中,j代表下一个工序是采用第j个施工模式,p0是预设值。
[0121]
步骤6、构建递归模糊小波小脑关节控制的神经网络模型;
[0122]
在本实施例中,该步骤具体包括:
[0123]
步骤61、构建递归模糊小波小脑关节控制的神经网络模型,所述神经网络模型有五个空间,分别为:
[0124]
输入空间:x=[x1,x2,x3,x4,x5,x6]
t
,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0125]
其中,x表示神经网络模型的输入,x1表示工期,x2表示成本,x3表示安全,x4表示排放,x5表示质量,x6表示施工总目标a,t表示矩阵的转置;
[0126]
成员函数空间:
[0127]
其中,μ
ijk
(xi)是成员函数,d
ijk
和c
ijk
是权重,随着迭代循环而优化;
[0128]
规则空间:
[0129]
其中,是规则,∏是累乘符号,θ
ijk
是更新的权重值;
[0130]
模糊空间:
[0131]
其中,是模糊,是权重值;
[0132]
输出空间:
[0133]
其中,y是神经网络模型的输出;
[0134]
步骤62、所述神经网络模型自身的参数d
ijk
、c
ijk
、和θ
ijk
采用梯度下降法进行优化。该步骤的目的是为了建立神经网络模型,对神经网络模型进行训练和优化,以便于后期使用,在输入一个施工子目标下的施工参数后,能输出对应的权重值和信息素因子。
[0135]
步骤7、在该神经网络模型中输入施工子目标的施工参数和施工总目标,并输出蚂蚁最短路径下施工子目标对应的权重和信息素因子,以更新施工总目标和信息素;
[0136]
在本实施例中,该步骤具体包括:
[0137]
在该神经网络模型中依次输入每个施工子目标的施工参数,更新迭代次数,并输出施工子目标对应的权重和信息素因子,采用递归模糊小波小脑关节控制的神经网络模型对子目标的权重值与信息素因子进行迭代优化;所述神经网络模型的优化结果如下:
[0138]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x1,x6]
t
,输出是工期子目标的权重值m1;
[0139]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x2,x6]
t
,输出是成本子目标的权重值m2;
[0140]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x3,x6]
t
,输出是安全子目标的权重值m3;
[0141]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x4,x6]
t
,输出是排放子目标的权重值m4;
[0142]
递归模糊小波小脑关节控制的神经网络模型的输入是x=[x5,x6]
t
,输出是质量子目标的权重值m5;
[0143]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x2,x3,x4,x5,x6]
t
,输出是信息素因子a;
[0144]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x2,x3,x4,x5,x6]
t
,输出是信息素因子b;
[0145]
递归模糊小波小脑关节控制的神经网络模型的输入是[x1,x6]
t
,输出是工期的权重值ω
t
;
[0146]
递归模糊小波小脑关节控制的神经网络模型的输出是成本的权重值ωd,输入是[x2,x6]
t
;
[0147]
递归模糊小波小脑关节控制的神经网络模型的输入是[x3,x6]
t
,输出是安全的权重值ωs;
[0148]
递归模糊小波小脑关节控制的神经网络模型的输入是[x4,x6]
t
,输出是排放的权重值ω
p
;
[0149]
递归模糊小波小脑关节控制的神经网络模型的输入是[x5,x6]
t
,输出是质量的权重值ωz。该步骤的目的是为了通过递归模糊小波小脑关节控制的神经网络模型得到施工子目标对应的权重和信息素因子,用于后期更新施工总目标、信息素和蚂蚁路径。
[0150]
步骤8、每只蚂蚁选择一个施工工序作为路径,实时计算并更新蚂蚁释放的信息素及蚂蚁路径;当全部蚂蚁收敛到同一路径或达到给定的迭代次数时,搜索结束,得出蚂蚁最短路径下最优先处理的施工工序。
[0151]
如图3所示,本发明实施例还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述的基于神经网络的建筑施工工序优化方法。
[0152]
如图4所示,本发明实施例还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的基于神经网络的建筑施工工序优化方法。
[0153]
以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1