一种基于大数据的船舶操控行为风险评估系统及评估方法与流程
1.本发明涉及一种基于大数据的船舶操控行为风险评估系统及评估方法,属于船舶航行安全技术领域,用于评估船舶操控行为。
背景技术:
2.船舶操控行为对于船舶安全航行非常重要,在实际航行中存在一些不规范的操控行为,存在安全隐患。船舶操控行为指船员在驾驶过程中对船舶的各种操控行为,内容包括启航、停航、正倒车切换等。实际航行过程中,往往会存在一些不规范行为,不规范的船舶操控行为会对船舶设备产生损坏及安全隐患。例如,在启航过程中如果水温没有达到预定数值就开始正车,会导致设备润滑条件不足,将可能导致主辅机零件磨损加剧,轻则提高船舶维护保养成本,重则引发主机、辅机等设备发生故障,影响船舶航行安全及船上人员安全,引发船舶事故。由此可见,船舶操控行为是否规范,对于船舶安全航行十分关键。而确保船舶操控行为规范的重要手段就是对其进行规范性的监管。
3.目前,对船舶的操控行为规范性的监管手段单一,自动化和数据化程度不够,同时缺乏全面性和及时性。传统监管方式是查看航行日志和轮机日志,在有条件的船舶上则通过视频监控设备进行远程监管或者通过人工巡视来查看判断船舶操控行为是否符合规范。但由于船舶的航行时间往往很长,人工查看工作量大、效率低下、准确率不高、受主观判断影响大,而且视频无法关联船舶在航行过程中的各种运行参数,难以完成全面的、深层次的规范性判断和挖掘。因此,需要利用信息化手段辅助管理人员自动监管,发现不规范行为并进行提示。
技术实现要素:
4.本发明所要解决的技术问题是提供一种基于大数据的船舶操控行为风险评估系统及评估方法,能够用于评估船舶操控行为;基于物联网和大数据技术,采集船舶启航、航行、停航全过程船舶方位数据和机舱监测数据,利用机器学习算法,融合船舶操控规则知识库,形成船舶操控行为规范模型库,可自动持续输出船舶操控行为规范性评定结果和评估报告,为船舶操控行为的监测预警提供信息化支撑,具有全面性、经济性和及时性,提升了船舶管理的时效性和准确性。
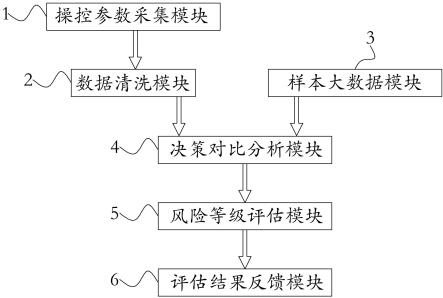
5.为了实现上述的技术特征,本发明的目的是这样实现的:一种基于大数据的船舶操控行为风险评估系统,包括操控参数采集模块、数据清洗模块、样本大数据库模块、决策对比分析模块、风险等级评估模块和评估结果反馈模块;
6.所述操控参数采集模块包括船舶航行数据采集模块和机舱监测数据采集模块,船舶航行数据采集模块用于采集船舶航行数据,机舱监测数据采集模块用于采集机舱监测数据;
7.所述数据清洗模块用于对操控参数采集模块所采集的数据进行清洗;
8.所述样本大数据库模块包括静态大数据模块和动态大数据模块,其中静态大数据
模块用于存储预先输入的船舶的各项固有的静态参数的初始数据,动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控行成时所采集的船舶航行数据和机舱监测数据并形成动态参数,动态参数与静态参数相结合形成标准样本参数;
9.所述决策对比分析模块用于提取经过数据清洗模块处理过的船舶航行数据和机舱监测数据与标准样本参数进行对比分析,判断船舶航行数据和机舱监测数据是否正常,并通过决策树算法获取不同操控行为所对应的操控行为模型,判断相应的操控行为是否符合规范要求;
10.所述风险等级评估模块用于收集决策对比分析模块所获取的针对操控行为模型所得到的分析判定结果,同时对其判定结果进行评估以得出对应分数,并针对上述不同操控行为模型赋予不同的权重,将所有分数加权后进行风险等级评估,得到本次航行的风险等级;
11.所述评估结果反馈模块用于统计并储存一段时间内的历次航行的风险等级,形成该一段时间内的评价报告。
12.所述船舶航行数据包括船舶航行起止时间、航行速度和航行轨迹;机舱监测数据包括船舶主机转速、功率、水温、油压和油舱液位。
13.所述静态大数据模块用于存储预先输入的船舶的各项固有的静态参数的初始数据,包括船型参数、排水量、主机参数、辅机参数、冷却系统参数、舵机参数、轴系及推进系统参数;
14.所述动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控行成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数。
15.所述不同操控行为模型包括:开航行为分析模型、停航行为分析模型、正倒车切换分析模型、航程航速分析模型、满负荷运行比分析模型、航行过程通导设备分析模型、夜航过程分析模型、驾驶过程分析模型和船舶停靠正确使用灯光分析模型。
16.基于大数据的船舶操控行为风险评估系统的评估方法,包括如下步骤:
17.s100,通过样本大数据库模块获取标准样本数据,其中,样本大数据库模块包括静态大数据模块和动态大数据模块,其中静态大数据模块用于存储预先输入的船舶的各项固有的静态参数的初始数据;动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控形成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数;
18.s200,通过操控参数采集模块获取该次航行的操控参数数据,其中操控参数采集模块包括船舶航行数据采集模块和机舱监测数据采集模块,船舶航行数据采集模块用于采集船舶航行数据,机舱监测数据采集模块用于采集包括机舱监测数据;
19.s300,数据清洗;通过数据清洗模块对操控参数采集模块所采集的航行数据采集模块和机舱监测数据采集模块进行清洗和降噪;
20.s400,通过决策对比分析模块提取经过数据清洗模块处理过的船舶航行数据和机舱监测数据与标准样本参数进行对比分析,判断船舶航行数据和机舱监测数据是否正常,并通过决策树算法获取操控行为所对应的不同操控行为模型,判断相应的操控行为是否符合规范要求;
21.s500,通过风险等级评估模块收集决策对比分析模块所获取的针对上述不同操控行为模型所得到的分析判定结果,同时对其判定结果进行评估得出分析判定结果的分数,并针对上述不同操控行为模型赋予权重,将所有分数加权后进行风险等级评估,得到本次航行的风险等级,所述风险等级对应分为:高风险、中风险、低风险、无风险;
22.s600,通过评估结果反馈模块用于统计并储存一段时间内的历次航行的风险等级,形成该一段时间内的评价报告。
23.所述不同操控行为模型包括:开航行为分析模型、停航行为分析模型、正倒车切换分析模型、航程航速分析模型、满负荷运行比分析模型、航行过程通导设备分析模型、夜航过程分析模型、驾驶过程分析模型和船舶正确使用灯光分析模型。
24.所述船舶航行数据包括船舶航行起止时间、航行速度和航行轨迹;机舱监测数据包括船舶主机转速、功率、水温、油压和油舱液位;数据获取采用传感器或测量仪器的采集实现;
25.所述s300中数据清理过程中,针对部分空值和异常值进行处理,由于数据量较大,部分空值直接删除,异常值采用四分位间距检测后剔除;
26.其中船舶航行数据和机舱监测数据主要为时序数据,采用滑动窗口法提取时间段数据的平均数、中位数、标准差、最大值、最小值、斜率、偏度和峰度作为特征,最终形成合适的特征数据集;
27.对于不同的操控行为,提取不同的特征值。
28.所述静态大数据模块用于存储预先输入的船舶的各项固有的静态参数的初始数据,包括船型参数、排水量、主机参数、辅机参数、冷却系统参数、舵机参数、轴系及推进系统参数;动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控形成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数。
29.所述s400中决策树算法中,决策树通过训练数据集进行学习,得出一棵自顶向下的树模型,再将测试数据应用于这棵树模型得出预测分类结果,这是一个包含根节点、中间节点和叶子节点的二叉树模型,每个节点根据每个属性的分裂标准进行判断和选择,叶子节点是样本的最终分类类别;
30.gini指数代表属性分类不确定性,其值越小,代表不确定越低,即作为选择最优特征的标准,基于gini指数作为属性分裂标准的决策树有cart、sliq和sprint;gini公式如下,pi代表了样本属于i类别的概率,样本被错分的概率为1-pi:
[0031][0032]
cart算法是一种分类回归二叉决策树,即当使用某个特征进行样本划分,只能划分为两个集合:等于给定样本特征的集合、不等于给定样本特征的集合;其中s为样本数据集,s1和s2为子样本集:
[0033][0034]
模型的生成过程:输入包括训练数据集s和停止计算的条件;输出为cart决策树,根据训练数据集,从根结点开始,依次对每一个结点进行以下处理去构建二叉决策树:
[0035]
(1)设结点的训练数据集为s,计算已有特征关于该数据集的gini指数,在这种情形下,对每一特征a,对其可能取到的每一个值a,按照样本点是否满足a=a这一试验条件,分割为s1和s2两部分,再利用(4)式计算a=a时的gini指数gini(s,a);
[0036]
(2)在所有可能的特征a以及他们所有可能的切分点a中,选择gini指数最小的特征和与其相应的切分点作为最优特征与最优切分点。依最优特征与最优切分点,从现结点生成两个子结点,将训练数据集依特征分配到两个子结点中去;
[0037]
(3)对两个子结点递归地调用(1)式-(2)式,直至满足停止条件,即节点中样本个数小于预定阈值,样本集的gini指数小于阈值,或者没有更多的特征;
[0038]
(4)生成cart决策树。
[0039]
船舶航行数据和机舱监测数据生成9个操控行为模型,各操控行为模型的主要标签和主要因子包括:
[0040]
操控行为模型一、开航行为分析模型,标签为:开航操控行为是否规范,主要因子为:水温曲线斜率、水温最大值、主机转速曲线斜率、水温-航速曲线相位差;
[0041]
操控行为模型二、停航行为分析模型,标签为:停航操控行为是否规范,主要因子为:水温曲线斜率、航速曲线斜率;
[0042]
操控行为模型三、正倒车切换分析模型,标签为:正倒车切换行为是否规范,主要因子为:主机转速曲线斜率、转速-航速曲线相位差;
[0043]
操控行为模型四、航程航速分析模型,标签为:航速航程是否异常,主要因子为:航程统计、航速统计、油耗统计;
[0044]
操控行为模型五、满负荷运行比分析模型,标签为:满负荷运行比是否异常,主要因子为:功率分布统计、最大功率;
[0045]
操控行为模型六、航行过程通导设备分析模型,标签为:航行过程通导设备是否异常,主要因子为:设备在线时长、航行时长;
[0046]
操控行为模型七、夜航过程分析模型,标签为:夜航过程操控行为是否规范,主要因子为:夜航航次、夜航航程、夜航主机转速曲线、夜航船舶轨迹曲线;
[0047]
操控行为模型八、驾驶过程分析模型,标签为:驾驶过程操控行为是否规范,主要因子为:主机转速统计、船舶航速统计、船舶轨迹曲线;
[0048]
操控行为模型九、船舶正确使用灯光分析模型,标签为:使用灯光操控行为是否规范,主要因子为:主机转速曲线、船舶停航轨迹曲线、船舶灯光状态监测;
[0049]
据此,通过决策树算法获取上述操控行为模型,并判断相应的操控行为是否符合规范要求。
[0050]
本发明有如下有益效果:
[0051]
本发明基于物联网和大数据技术,采集船舶启航、航行、停航全过程船舶方位数据和机舱监测数据,利用机器学习算法,融合船舶操控规则知识库,形成船舶操控行为规范模型库,可自动持续输出船舶操控行为规范性评定结果和评估报告,为船舶操控行为的监测预警提供信息化支撑,具有全面性、经济性和及时性,提升了船舶管理的时效性和准确性。
附图说明
[0052]
下面结合附图和实施例对本发明作进一步说明。
[0053]
图1为本发明的风险评估系统框图。
[0054]
图2为本发明的操控参数采集模块框图。
[0055]
图3为本发明的样本大数据库模块框图。
[0056]
图中:操控参数采集模块1、数据清洗模块2、样本大数据库模块3、决策对比分析模块4、风险等级评估模块5、评估结果反馈模块6;
[0057]
船舶航行数据采集模块101、机舱监测数据采集模块102;
[0058]
静态大数据模块301和动态大数据模块302。
具体实施方式
[0059]
下面结合附图对本发明的实施方式做进一步的说明。
[0060]
实施例1:
[0061]
参见图1-3,一种基于大数据的船舶操控行为风险评估系统,包括操控参数采集模块1、数据清洗模块2、样本大数据库模块3、决策对比分析模块4、风险等级评估模块5和评估结果反馈模块6;所述操控参数采集模块1包括船舶航行数据采集模块101和机舱监测数据采集模块102,船舶航行数据采集模块101用于采集船舶航行数据,机舱监测数据采集模块102用于采集机舱监测数据;所述数据清洗模块2用于对操控参数采集模块1所采集的数据进行清洗;所述样本大数据库模块3包括静态大数据模块301和动态大数据模块302,其中静态大数据模块301用于存储预先输入的船舶的各项固有的静态参数的初始数据,动态大数据模块302用于采集船舶在一段时间的正常航行中通过符合规范要求的操控行成时所采集的船舶航行数据和机舱监测数据并形成动态参数,动态参数与静态参数相结合形成标准样本参数;所述决策对比分析模块4用于提取经过数据清洗模块处理过的船舶航行数据和机舱监测数据与标准样本参数进行对比分析,判断船舶航行数据和机舱监测数据是否正常,并通过决策树算法获取不同操控行为所对应的操控行为模型,判断相应的操控行为是否符合规范要求;所述风险等级评估模块5用于收集决策对比分析模块4所获取的针对操控行为模型所得到的分析判定结果,同时对其判定结果进行评估以得出对应分数,并针对上述不同操控行为模型赋予不同的权重,将所有分数加权后进行风险等级评估,得到本次航行的风险等级;所述评估结果反馈模块6用于统计并储存一段时间内的历次航行的风险等级,形成该一段时间内的评价报告。通过采用上述系统,其基于基于物联网和大数据技术,采集船舶启航、航行、停航全过程船舶方位数据和机舱监测数据,利用机器学习算法,融合船舶操控规则知识库,形成船舶操控行为规范模型库,可自动持续输出船舶操控行为规范性评定结果和评估报告,为船舶操控行为的监测预警提供信息化支撑,具有全面性、经济性和及时性,提升了船舶管理的时效性和准确性。
[0062]
进一步的,所述船舶航行数据包括船舶航行起止时间、航行速度和航行轨迹;机舱监测数据包括船舶主机转速、功率、水温、油压和油舱液位。所述静态大数据模块301用于存储预先输入的船舶的各项固有的静态参数的初始数据,包括船型参数、排水量、主机参数、辅机参数、冷却系统参数、舵机参数、轴系及推进系统参数;所述动态大数据模块302用于采集船舶在一段时间的正常航行中通过符合规范要求的操控行成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数。通过采用上述的船舶航行数据以及机舱监测数据便于后续集合静态大数据模
块301和动态大数据模块302形成标准样本参数。
[0063]
进一步的,所述不同操控行为模型包括:开航行为分析模型、停航行为分析模型、正倒车切换分析模型、航程航速分析模型、满负荷运行比分析模型、航行过程通导设备分析模型、夜航过程分析模型、驾驶过程分析模型和船舶停靠正确使用灯光分析模型。通过上述的不同操控行为模型便于后续利用机器学习算法,融合船舶操控规则知识库,形成船舶操控行为规范模型库,可自动持续输出船舶操控行为规范性评定结果和评估报告,为船舶操控行为的监测预警提供信息化支撑。
[0064]
实施例2:
[0065]
基于大数据的船舶操控行为风险评估系统的评估方法,包括如下步骤:
[0066]
s100,通过样本大数据库模块3获取标准样本数据,其中,样本大数据库模块包括静态大数据模块和动态大数据模块,其中静态大数据模块用于存储预先输入的船舶的各项固有的静态参数的初始数据;动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控形成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数;
[0067]
s200,通过操控参数采集模块1获取该次航行的操控参数数据,其中操控参数采集模块包括船舶航行数据采集模块和机舱监测数据采集模块,船舶航行数据采集模块用于采集船舶航行数据,机舱监测数据采集模块用于采集包括机舱监测数据;
[0068]
s300,数据清洗;通过数据清洗模块2对操控参数采集模块1所采集的航行数据采集模块和机舱监测数据采集模块进行清洗和降噪;
[0069]
s400,通过决策对比分析模块4提取经过数据清洗模块2处理过的船舶航行数据和机舱监测数据与标准样本参数进行对比分析,判断船舶航行数据和机舱监测数据是否正常,并通过决策树算法获取操控行为所对应的不同操控行为模型,判断相应的操控行为是否符合规范要求;
[0070]
s500,通过风险等级评估模块5收集决策对比分析模块4所获取的针对上述不同操控行为模型所得到的分析判定结果,同时对其判定结果进行评估得出分析判定结果的分数,并针对上述不同操控行为模型赋予权重,将所有分数加权后进行风险等级评估,得到本次航行的风险等级,所述风险等级对应分为:高风险、中风险、低风险、无风险;
[0071]
s600,通过评估结果反馈模块6用于统计并储存一段时间内的历次航行的风险等级,形成该一段时间内的评价报告。
[0072]
进一步的,所述不同操控行为模型包括:开航行为分析模型、停航行为分析模型、正倒车切换分析模型、航程航速分析模型、满负荷运行比分析模型、航行过程通导设备分析模型、夜航过程分析模型、驾驶过程分析模型和船舶正确使用灯光分析模型。
[0073]
进一步的,所述船舶航行数据包括船舶航行起止时间、航行速度和航行轨迹;机舱监测数据包括船舶主机转速、功率、水温、油压和油舱液位;数据获取采用传感器或测量仪器的采集实现;
[0074]
进一步的,所述s300中数据清理过程中,针对部分空值和异常值进行处理,由于数据量较大,部分空值直接删除,异常值采用四分位间距检测后剔除;
[0075]
进一步的,其中船舶航行数据和机舱监测数据主要为时序数据,采用滑动窗口法提取时间段数据的平均数、中位数、标准差、最大值、最小值、斜率、偏度和峰度作为特征,最
终形成合适的特征数据集;对于不同的操控行为,提取不同的特征值。
[0076]
进一步的,所述静态大数据模块用于存储预先输入的船舶的各项固有的静态参数的初始数据,包括船型参数、排水量、主机参数、辅机参数、冷却系统参数、舵机参数、轴系及推进系统参数;动态大数据模块用于采集船舶在一段时间的正常航行中通过符合规范要求的操控形成时所采集的船舶航行数据和机舱监测数据并形成动态参数,通过动态参数与静态参数相结合形成与船型相匹配的标准样本参数。
[0077]
实施例3:
[0078]
所述s400中决策树算法中,决策树通过训练数据集进行学习,得出一棵自顶向下的树模型,再将测试数据应用于这棵树模型得出预测分类结果,这是一个包含根节点、中间节点和叶子节点的二叉树模型,每个节点根据每个属性的分裂标准进行判断和选择,叶子节点是样本的最终分类类别;
[0079]
gini指数代表属性分类不确定性,其值越小,代表不确定越低,即作为选择最优特征的标准,基于gini指数作为属性分裂标准的决策树有cart、sliq和sprint;gini公式如下,pi代表了样本属于i类别的概率,样本被错分的概率为1-pi:
[0080][0081]
cart算法是一种分类回归二叉决策树,即当使用某个特征进行样本划分,只能划分为两个集合:等于给定样本特征的集合、不等于给定样本特征的集合;其中s为样本数据集,s1和s2为子样本集:
[0082][0083]
模型的生成过程:输入包括训练数据集s和停止计算的条件;输出为cart决策树,根据训练数据集,从根结点开始,依次对每一个结点进行以下处理去构建二叉决策树:
[0084]
(1)设结点的训练数据集为s,计算已有特征关于该数据集的gini指数,在这种情形下,对每一特征a,对其可能取到的每一个值a,按照样本点是否满足a=a这一试验条件,分割为s1和s2两部分,再利用(4)式计算a=a时的gini指数gini(s,a);
[0085]
(2)在所有可能的特征a以及他们所有可能的切分点a中,选择gini指数最小的特征和与其相应的切分点作为最优特征与最优切分点。依最优特征与最优切分点,从现结点生成两个子结点,将训练数据集依特征分配到两个子结点中去;
[0086]
(3)对两个子结点递归地调用(1)式-(2)式,直至满足停止条件,即节点中样本个数小于预定阈值,样本集的gini指数小于阈值,或者没有更多的特征;
[0087]
(4)生成cart决策树。
[0088]
实施例4:
[0089]
具体实施过程中,将船舶航行数据和机舱监测数据生成9个操控行为模型,各操控行为模型的主要标签和主要因子包括:
[0090]
操控行为模型一、开航行为分析模型,标签为:开航操控行为是否规范,主要因子为:水温曲线斜率、水温最大值、主机转速曲线斜率、水温-航速曲线相位差;
[0091]
操控行为模型二、停航行为分析模型,标签为:停航操控行为是否规范,主要因子
为:水温曲线斜率、航速曲线斜率;
[0092]
操控行为模型三、正倒车切换分析模型,标签为:正倒车切换行为是否规范,主要因子为:主机转速曲线斜率、转速-航速曲线相位差;
[0093]
操控行为模型四、航程航速分析模型,标签为:航速航程是否异常,主要因子为:航程统计、航速统计、油耗统计;
[0094]
操控行为模型五、满负荷运行比分析模型,标签为:满负荷运行比是否异常,主要因子为:功率分布统计、最大功率;
[0095]
操控行为模型六、航行过程通导设备分析模型,标签为:航行过程通导设备是否异常,主要因子为:设备在线时长、航行时长;
[0096]
操控行为模型七、夜航过程分析模型,标签为:夜航过程操控行为是否规范,主要因子为:夜航航次、夜航航程、夜航主机转速曲线、夜航船舶轨迹曲线;
[0097]
操控行为模型八、驾驶过程分析模型,标签为:驾驶过程操控行为是否规范,主要因子为:主机转速统计、船舶航速统计、船舶轨迹曲线;
[0098]
操控行为模型九、船舶正确使用灯光分析模型,标签为:使用灯光操控行为是否规范,主要因子为:主机转速曲线、船舶停航轨迹曲线、船舶灯光状态监测;
[0099]
据此,通过决策树算法获取上述操控行为模型,并判断相应的操控行为是否符合规范要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1