多波段能量特征融合的海面目标航迹起始参数确定方法与流程
本发明涉及雷达信号处理,具体涉及多波段能量特征融合的海面目标航迹起始参数确定方法。
背景技术:
1、利用机载雷达传感器探测复杂环境下舰船等海面目标,是一项提高己方海上侦察、监视、搜索及预警能力获取海面态势信息建立对抗优势的非常重要的支撑技术。根据海用机载雷达作用功能的不同,可以分为预警雷达、搜索雷达和火控雷达:预警雷达探测距离最远但精度不好,对海探测海杂波模型一般选用瑞利分布;搜索雷达相对于预警雷达和火控雷达,探测距离折中,对海探测海杂波模型一般选用瑞利分布或者k分布;火控雷达探测距离小于前两者但精度更高,对海探测海杂波模型一般选用k分布。
2、在机载雷达对海探测的过程中,所采用的海面目标跟踪技术一直是科研工作者和工程技术人员研究的热点。目标跟踪技术主要包括航迹起始、航迹维持、航迹终结三个环节,而航迹起始作为目标跟踪的首要环节,其性能的好坏将直接影响对海雷达探测任务的执行效率,因此航迹起始一直是海面目标跟踪技术研究的热点之一。
3、传统海面目标跟踪技术的航迹起始方法主要存在以下问题:
4、1)没有考虑不同波段对海雷达传感器的协同起始;
5、2)没有综合考虑由不同波段观测的能量特征引起的数据质量差异对航迹起始性能的影响;
6、3)起始准确度低,导致航迹收敛速度慢。
技术实现思路
1、有鉴于此,本发明提供多波段能量特征融合的海面目标航迹起始参数确定方法,采用双波段观测的能量似然比特征剔除数据质量相对较低的观测,进而保证用于航迹起始的观测具有相对较好的数据质量,起始准确度高,收敛速度快,抗虚警能力强,提高了航迹起始参数的可信度。
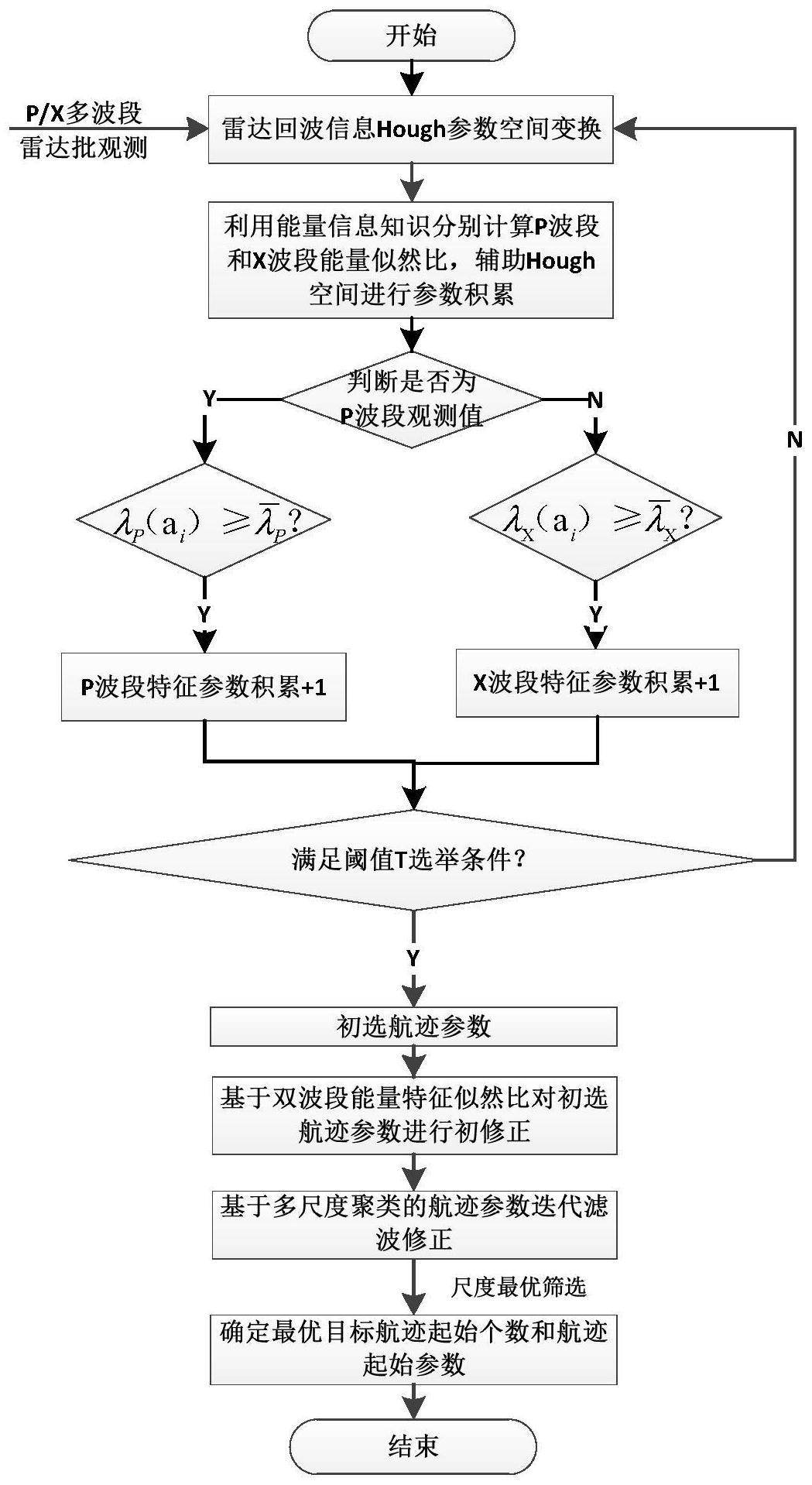
2、多波段能量特征融合的海面目标航迹起始参数确定方法,包括如下步骤:
3、步骤1、将雷达回波信息转换到hough空间,对相应的hough参数空间进行单元空间划分;
4、步骤2、基于雷达回波信息中候选观测的能量似然比,进行不同波段知识特征辅助hough参数空间积累,获得单元空间积累值;
5、步骤3、根据单元空间积累值进行低阈值航迹初选,并对航迹初选结果进行基于不同波段能量特征辅助的初选航迹参数修正;
6、步骤4、对修正后的初选航迹参数进行基于多尺度聚类的航迹参数迭代滤波修正;
7、步骤5、对迭代滤波修正后的航迹参数进行寻优,确定最优目标航迹起始个数和航迹起始参数。
8、进一步地,步骤1中hough参数空间划分方法为:将不同波段的雷达回波信息转换到hough空间,将相应的hough参数空间划分成大小为δθ×δρ的单元空间,则第k行m列子单元可表示为(θk,ρm),
9、
10、
11、ρmin为常数;θk和ρm分别为单元长度δθ×δρ的第k行m列个子单元的θ参数中心坐标和ρ参数中心坐标。
12、进一步地,其特征在于,步骤2中不同波段知识特征辅助hough参数空间积累方法包括如下步骤:
13、针对第i个观测的能量信息,计算对应波段观测能量似然比λp(ai):
14、
15、式中,(xi,yi)为目标在雷达的ned的测量位置坐标,ai为第i个观测通过能量信息,为目标t产生的有效量测的能量概率密度函数,其服从瑞利分布,d为信噪比;为仅有噪声的虚警量测的能量概率密度函数,其服从瑞利分布;τ为相应的检测门限,且满足pfa为虚警概率;
16、通过hough变换对参数空间单元投票,获得(θk,ρm)单元的投票结果b(k,m);
17、遍历雷达投票结果,对划分的参数空间所有子单元进行投票结果积累,获得单元空间积累值。
18、进一步地,步骤2中投票积累规则为:若子单元中心误差|δρi|≤δρ/2,且相应雷达观测的能量似然比或者则对应b(k,m)的投票积累值加1,否则不加,其中为p波段量测能量似然比门限经验值,为x波段量测能量似然比门限经验值。
19、进一步地,步骤3中低阈值航迹初选方法为:设置低阈值t,根据投票积累结果b(k,m)进行选举,得到初步选举的航迹参数集c(k,m);选举条件为,若 b(k,m)≥t,则选举成功,记为c(k,m)={(θk,ρm)|b(k,m)≥t},否则,选举失败,记为0;其中,t=起始窗长×检测概率×α,α为选举因子。
20、进一步地,步骤3中基于不同波段能量特征辅助的初选航迹参数修正方法为:
21、对初选航迹参数c(k,m)的ρm参数进行初修正,修正值为
22、
23、式中,δ(ai)为指示函数,取0或1,δ(ai)=1表示量测来源于p波段,否则,源于x波段;
24、得到ρm参数对应m的修正值为
25、
26、则对初选航迹参数c(k,m)的初修正值为
27、进一步地,步骤4中基于多尺度聚类的航迹参数迭代滤波修正方法包括如下步骤:
28、修正后的初选航迹参数集的分布函数为:
29、
30、其中,为第j个航迹初选参数,且n为初选航迹的条数;根据尺度空间理论,f(x)的多尺度聚类表示为,
31、
32、给定迭代容许误差ζ,对于每一个给定的尺度σs∈{σ1,σ2,...,σm},对于每一个航迹初选参数xq,q=1,2,...,nc,nc为一次修正参数集c的个数;
33、令
34、其中为迭代初值,根据式(12)执行迭代计算,直至结束迭代运算,得到航迹参数xq的迭代滤波收敛值,记为
35、对于任意两个航迹参数xa、xb,对应的迭代滤波收敛值为和 (1≤a,b≤n),若则将两个聚类合并,聚类数为cs,聚类中心集合为cs表示尺度参数σs下的目标航迹数目,为尺度参数σs下的航迹参数迭代滤波修正值。
36、进一步地,步骤5中最优目标航迹起始个数和航迹起始参数确定方法包括如下步骤:
37、根据得到的聚类分析结果,以生存时间最长的聚类数目为最优聚类数目以聚类中心漂移速度最小的聚类中心为最优聚类尺度则对应的聚类中心即为最优聚类中心;
38、最优聚类数目为,
39、
40、其中,τ(c)=max(σs)-min(σs),s=1,2,...,m,cs=c,τ(c)为聚类数目c的生存周期;
41、最优尺度其中,
42、
43、d(σ)为聚类中心的漂移速度,vip为第i个聚类中心的第p维分量;
44、则最优聚类数目即为目标航迹的真实数目,最优尺度对应的聚类参数即为目标航迹的真实参数。
45、与现有技术相比,本发明的有益效果为:
46、1.本方法利用不同波段观测的能量似然比特征剔除数据质量相对较低的观测,进而保证用于航迹起始的观测具有相对较好的数据质量,提高了航迹起始参数的可信度。
47、2.本方法利用不同波段观测的能量似然比特征对航迹初选参数进行修正,提高了基于多尺度聚类迭代滤波初值的准确性,可以有效减少迭代次数,实现了快速准确地获得目标航迹起始的真实航迹数目和航迹参数。
48、3.本发明既能应用于单平台多面阵下的多波段协同跟踪态势感知背景,又能应用于多平台多波段协同探跟踪态势感知背景,方法通用性强,市场前景广阔,经济效益潜力巨大。
- 还没有人留言评论。精彩留言会获得点赞!