伪障碍物检测方法、装置、自动驾驶设备及计算机存储介质与流程
本技术实施例涉及无人驾驶,尤其涉及一种伪障碍物检测方法、装置、自动驾驶设备及计算机存储介质。
背景技术:
1、自动驾驶技术是一种依靠计算机与人工智能来操控相应的设备自主行驶的一种技术,也称无人驾驶技术。
2、在自动驾驶技术中,环境感知是其重要的一个组成部分。环境感知主要通过多种类型的环境传感器对自动驾驶设备(如车辆、机器人、飞行器等)的周围环境进行数据感知生成三维点云数据,以应用到自动驾驶决策,比如定位、规控等后端环节。
3、在自动驾驶设备所在的环境中,环境传感器感知的目标物不但包括影响自动驾驶决策的障碍物,还包括看似影响驾驶但实际不影响自动驾驶决策的障碍物,又称之为伪障碍物,比如水汽、扬尘等。
4、为此,现有技术提供如下两种解决方案:
5、(1)采集大量伪障碍物的三维点云数据,并使用其来标注以训练深度学习目标检测模型,基于该深度学习目标检测模型来检测伪障碍物。
6、(2)栅格化3d目标物,并统计三维点云数量直方图,根据统计结果来识别伪障碍物。
7、针对上述第(1)种方式,由于需要采集大量伪障碍物的三维点云数据来标注以训练深度学习目标检测模型,由此导致需要较长的时间来训练深度学习目标检测模型,而与此同时,深度学习目标检测模型的准确性,又依赖于伪障碍物的三维点云数据的数据量,一旦数据量较少,就会使得深度学习目标检测模型检测的准确度较差。
8、针对上述第(2)种方式,由于目标物的大小不固定,难以使用统一的三维点云数量直方图标准来实现伪障碍物检测。
技术实现思路
1、有鉴于此,本技术实施例提供一种伪障碍物检测方案,以至少部分解决上述问题。
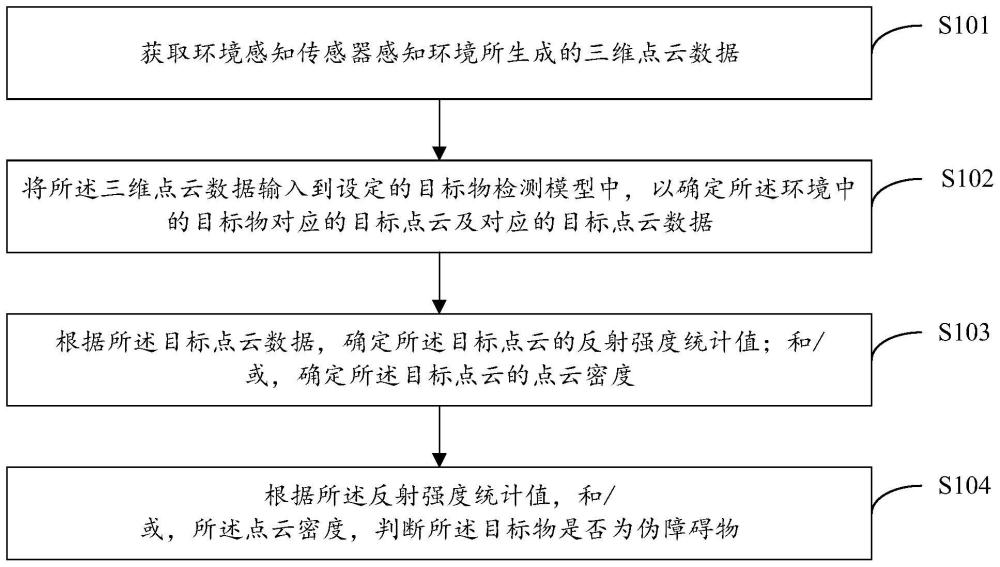
2、根据本技术实施例的第一方面,提供了一种伪障碍物检测方法,其包括:获取环境感知传感器感知环境所生成的三维点云数据;将所述三维点云数据输入到设定的目标物检测模型中,以确定所述环境中的目标物对应的目标点云及对应的目标点云数据;根据所述目标点云数据,确定所述目标点云的反射强度统计值;和/或,确定所述目标点云的点云密度;根据所述反射强度统计值,和/或,所述点云密度,判断所述目标物是否为伪障碍物。
3、可选地,所述根据所述目标点云数据,确定所述目标点云的反射强度统计值,包括:
4、根据所述目标点云数据,确定点云反射强度值以及点云数量,以确定所述目标点云的反射强度统计值。
5、可选地,所述确定所述目标点云的反射强度统计值,包括:根据所述点云反射强度值以及点云数量,计算所述目标点云的反射强度均值,所述反射强度均值作为所述反射强度统计值。
6、可选地,所述根据所述目标点云数据,确定所述目标点云的点云密度,包括:
7、获取所述目标点云数据中的点云中心坐标数据,以及目标物估算尺寸数据;
8、根据所述点云中心坐标数据以及所述目标物估算尺寸数据,确定所述目标点云的中心区域以及位于所述中心区域的点云数量;
9、根据所述中心区域中的点云数量,确定所述中心区域的点云密度。
10、可选地,所述根据所述目标点云数据,确定所述目标点云的反射强度统计值;和/或,确定所述目标点云的点云密度,之前还包括:筛除掉非伪障碍物对应的目标点云及对应的目标点云数据。
11、可选地,所述筛除掉异常点云及对应的异常点云数据,包括:
12、获取所述目标点云数据中的目标物距离数据;
13、响应于所述目标物距离数据大于设定距离阈值,将对应的目标点云判定为所述异常点云,对应的目标点云数据判定为所述异常点云数据以筛除。
14、可选地,所述筛除掉异常点云及对应的异常点云数据,包括:
15、获取所述目标点云数据中的目标物估算尺寸数据;
16、响应于所述目标物估算尺寸数据大于设定尺寸阈值,将对应的目标点云判定为所述异常点云,对应的目标点云数据判定为所述异常点云数据以筛除。
17、可选地,所述筛除掉异常点云及对应的异常点云数据,包括:
18、获取所述目标点云数据中的点云反射强度值;
19、确定所述点云反射强度值大于设定的点云反射强度阈值的点云数量;
20、响应于所述点云反射强度值大于设定的点云反射强度阈值的点云数量大于设定的点云数量阈值,将对应的目标点云判定为所述异常点云,对应的目标点云数据判定为所述异常点云数据以筛除。
21、可选地,所述根据所述反射强度统计值判断所述目标物是否为伪障碍物,包括:
22、判断所述反射强度统计值是否小于设定的反射强度阈值;
23、响应于所述反射强度均值小于所述设定的点云反射强度阈值,判定所述目标物为伪障碍物。
24、可选地,所述根据所述点云密度,判断所述目标物是否为伪障碍物,包括:
25、判断所述点云密度是否大于设定的点云密度阈值;
26、响应于所述点云密度是否大于设定的点云密度阈值,判定所述目标物为伪障碍物。
27、可选地,所述根据所述反射强度统计值,和,所述点云密度,判断所述目标物是否为伪障碍物,包括:
28、判断所述反射强度统计值是否小于设定的反射强度阈值;
29、判断所述点云密度是否大于设定的点云密度阈值;
30、响应于所述反射强度均值小于所述设定的点云反射强度阈值,且,所述点云密度是否大于设定的点云密度阈值,判定所述目标物为伪障碍物。
31、根据本技术实施例的第二方面,提供了一种伪障碍物检测装置,其包括:云数据获取单元,用于获取环境感知传感器感知环境所生成的三维点云数据;目标点云确定单元,将所述三维点云数据输入到设定的目标物检测模型中,以确定所述环境中的目标物对应的目标点云及对应的目标点云数据;特征确定单元,用于根据所述目标点云数据,确定所述目标点云的反射强度统计值;和/或,确定所述目标点云的点云密度;判断单元,用于根据所述反射强度统计值,和/或,所述点云密度,判断所述目标物是否为伪障碍物。
32、根据本技术实施例的第三方面,提供了一种自动驾驶设备,包括:环境感知传感器和处理器;其中:所述环境感知传感器,用于感知自动驾驶设备所在的环境以生成三维点云数据;所述处理器,用于基于所述三维点云数据,执行如第一方面所述的方法。
33、根据本技术实施例的第四方面,提供了一种计算机存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的方法。
34、根据本技术实施例提供的伪障碍物检测方案,基于所述目标点云数据,确定所述目标点云的反射强度统计值;和/或,确定所述目标点云的点云密,直接根据所述反射强度统计值,和/或,所述点云密度,即可判断所述目标物是否为伪障碍物。由此,无须使用大量伪障碍物的三维点云数据来标注以训练深度学习目标检测模型,因此,减少了方案执行的耗时和成本。同时,由于根据伪障碍物在反射强度统计值,和/或,所述点云密度方面的特性,直接实现了伪障碍物的判断,因此,提高了伪障碍物判断的准确性。而且,根据伪障碍物在反射强度统计值,和/或,所述点云密度方面的特性,可以使用与不同大小的目标物,因此,基于相同的判断标准实现伪障碍物判断。由此,既实现了以简单统一标准实现伪障碍物的准确检测,又大大降低了检测耗时和成本,提高了检测效率。
- 还没有人留言评论。精彩留言会获得点赞!