一种原油储罐智能清洗产物减量化方法
1.一种原油储罐智能清洗产物减量化方法,属于原油储罐清洗技术领域。
背景技术:
2.利用储油罐存储是战略石油储备的主要方式。在成品油储油罐长时间的储运中,成品油中的少量沙粒、泥土、重金属盐类等杂质因密度差,会和水一起沉降积累在储油罐底部,形成又黑又稠的胶状物质,即储油罐底泥。杂质和水分会降低成品油的品质,影响油品计算的精确度;加速储油罐腐蚀,严重时会引起底板穿孔,造成漏油事故;产生静电并积聚,造成静电事故,因此都需要对储油罐进行清洗。储油罐清洗技术先后经历了人工清洗和机械清洗阶段,随着人们对储油罐清洗作业安全、效率、成本、环保要求的不断提高,储罐清洗机器人技术作为一种无需人员进罐的清洗技术得到了国内外越来越多的关注。然而机器人清洗成品油罐内底泥的产物,以及清理水罐的底泥,若直接排放,则会对环境带来很大污染隐患。因此,罐外的资源化处理就显得尤为重要了,然而在现有技术中,大多数罐外油泥处理方法存在成本高、回收率较低等问题,实际应用效果不大。
3.申请号为202010538240.2,申请日为2020年6月12日,发明名称为“一种机场油罐无人快速清洗系统”的中国发明专利中公开了一种设计油罐机械化清洗、油气回收以及污水达标排放技术的技术方案,在该技术方案中提供了机场油罐无人快速清洗系统,包括清洗模块、气体检测模块、氮气发生模块、真空抽吸模块、油水分离回用模块、污水达标排放处理模块、油气回收处理模块和无损检测模块,其结合机场油罐位置分布广、油罐类型容量范围广、作业时长受限的特点设计了小型三维旋转喷头、立式喷枪、侧壁喷枪以及无人检测机器人等多种清洗装置形式,并且针对于大型油罐的清洗机器人上搭载高频导波探伤设备完成油罐罐底板缺陷检测工作,可以检测油罐工作状态保证了油罐的长期连续运行。
4.然而在该技术方案中,清洗机器人在原油储罐内完全由人为控制,对于大型油罐中可视化困难、罐底面积大的环境中人工操控精度较低、未进行路径规划导致的清洗时间长问题会更加突出;并且当原油储罐内油泥物性参数差距较大,排泥量不稳定的情况下,不能进行实时调节的“过滤+紧凑型气旋浮”与“电凝絮+紧凑型气旋浮”处理系统会导致排出产物质量不能得到保证以及耗费大量电力、药剂造成资源浪费。
技术实现要素:
5.本发明要解决的技术问题是:克服现有技术的不足,提供一种将纯物理处理工艺与减量化技术结合,通过工控机对清洗机器人的罐内清洗和罐外减量化工艺进行控制,相比较现有技术,降低了回收成本,同时提高了回收率的原油储罐智能清洗产物减量化方法。
6.本发明解决其技术问题所采用的技术方案是:该原油储罐智能清洗产物减量化方法,其特征在于:包括如下步骤:
7.步骤1001,根据原油储罐的体积大小、原油储罐中水、油、泥的比例设计减量化系统,减量化系统包括工控机以及位于原油储罐内的清洗机器人;
8.步骤1002,利用原油储罐内声纳探测装置与清洗机器人的声纳探测装置测量原油储罐内油泥分布情况,并建立油泥分布数据库供工控机进行调用;
9.步骤1003,工控机算出清洗机器人最短行进路线并进行训练,清洗机器人按照工控机规划在最短行进路线在原油储罐内行进并进行清洗,清洗机器人通过其搭载的声纳,将冲洗后的污泥状况实时监测反馈到工控机并实时更新步骤1002中建立的油泥分布数据库;
10.步骤1004,工控机利用清洗机器人罐中定位系统观测清洗机器人在原油储罐内的移动速度,并建立机器人移动速度数据库;
11.步骤1005,清洗机器人是否无法行进;
12.工控机判断清洗机器人是否无法行进,如果无法行进,执行步骤1007,如果清洗机器人正常行进,执行步骤1006;
13.步骤1006,工控机调用油泥分布数据库对清洗机器人所处位置的油泥厚度进行估计,判断油泥厚度是否达标,如果达标,执行步骤1009,如果不达标,执行步骤1008;
14.步骤1007,工控机调节射流喷嘴射流压力以及射流角度,并返回步骤1004;
15.步骤1008,工控机根据油泥厚度调节清洗泵射流压力;
16.步骤1009,结束原油储罐内排泥;
17.步骤1010,工控机利用软测量技术对减量化系统产物含油量进行测量,建立减量化系统产物含油量数据库;
18.步骤1011,工控机调用减量化系统产物含油量数据库,判断含油量是否达标,如果达标,执行步骤1013,如果不达标,执行步骤1012;
19.步骤1012,工控机调节减量化系统的运行参数;
20.步骤1013,结束油泥减量化系统。
21.优选的,在所述的步骤1003中,所述的训练包括如下步骤:
22.步骤1003-1,初始化各参数,根据声纳探测得到的罐底油泥分布数据库绘制电子地图并进行灰度化处理;
23.步骤1003-2,根据油泥分布情况规划一条最优路径并对路径进行多点分段处理;
24.步骤1003-3,初始化训练模型数据,并且记录下当前q值,通过ε-greedy策略找到最大q值对应动作;
25.步骤1003-4,获取下一位置信息并利用更新相应q值;
26.式中:q(s,a)为对应动作量和状态量的估计q值,其中s表示agent的状态量,a表示agent的动作量;q(s',a)为对应动作量和状态量的真实q值,其中s表示agent的状态量,a表示agent的动作量;a为agent的动作集合;α为学习率;γ为折扣因子;r为奖励机制中的奖励值;
27.步骤1003-5,判断所处位置是否为油泥聚集点,若为目标点进入步骤1003-6,否则返回步骤1003-4;
28.步骤1003-6,判断训练是否达到迭代次数,若达到设定值则进入步骤1003-7,否则返回步骤1003-3;
29.步骤1003-7,结束。
30.优选的,在所述的步骤1003-3中,设置有奖励机制r,具体包括如下步骤:
31.步骤1003-3-1,清洗机器人处于罐体以外区域或与原油储罐内障碍物相碰时,则会获得一个负数奖励;
32.步骤1003-3-2,当清洗机器人处于目标点时,获得一个正数奖励;
33.步骤1003-3-3,排除以上两种情况,清洗机器人则会按照设定的清洗机器人所处位置与目标点位置距离的反比函数来获取奖励。
34.该奖励机制中应用计算两点间距离的反比函数来获取奖励值的方法能够使清洗机器人在越靠近目标点时获取的奖励值越大,而能够训练出一条最优的自主避障路径,奖励函数如下式所示:
[0035][0036]
式中:a0表示一个正值,经过仿真调试选取;k为比例系数,经过仿真调试选取;(x0,y0)为清洗机器人当前所处坐标;(x
goal
,y
goal
)为预期到达目标点坐标。
[0037]
优选的,在所述的减量化系统中,在原油储罐外设置有清洗泵,清洗泵通过管路与清洗机器人相连,在原油储罐外部还设置有抽污泵,抽污泵将原油储罐内的油泥抽出后送入预处理器中,预处理器的出口连接离心机,离心机的出口分别连接油水分离器和裂解炉,油水分离器的出口分别连接污水缓冲罐以及原油储罐。
[0038]
优选的,所述的预处理器包括预处理器底座,在预处理器底座的表面设置有多个支座,在支座之间设置有预处理腔,在预处理腔上端口的预处理器上盖处设置有加药口和清洗水入口,在预处理腔的顶部一侧设置有含油污泥入口,在预处理腔的底部设置有含油污泥出口;在预处理器上盖上固定有搅拌机构。
[0039]
优选的,所述的搅拌机构包括驱动机构,驱动机构的输出轴同轴固定有搅拌轴,搅拌轴进入预处理腔内,在搅拌轴的下部设置有桨叶。
[0040]
优选的,搅拌机构搅拌功率及计算公式为:
[0041][0042][0043]
其中:pj表示搅拌功率;np表示功率准数;表示物料的平均密度;n表示叶轮转速;d表示叶轮直径;
[0044]
优选的,所述搅拌轴轴径的计算公式为:
[0045][0046]
其中:d3表示轴径;pj表示搅拌功率;[τ]表示许用切应力;n表示叶轮转速。
[0047]
优选的,所述的油水分离器包括分离器底座,在分离器底座的表面安装有筒体,在
筒体一端的顶部设置有入口构件,在入口构件进入筒体内部之后通过进液管接入排泥漏斗中;在排泥漏斗的侧部依次设置有稳流构件和聚结构件;在筒体的另一端设置有收油装置,在收油装置处引出有收油口,在收油装置的底部设置有双向集液构件,在双向集液构件的底部设置有排水口。
[0048]
优选的,所述的排泥漏斗包括漏斗体,漏斗体的底部设置有排泥管,排泥管穿过筒体后引出,在漏斗体的上端口处设置有漏斗顶盖,所述进液管从漏斗顶盖的中心处垂直进入漏斗体内,在漏斗顶盖的表面还开设有若干顶盖开孔。
[0049]
与现有技术相比,本发明所具有的有益效果是:
[0050]
1、在本原油储罐智能清洗产物减量化方法中,将纯物理处理工艺与减量化技术结合,通过工控机对清洗机器人的罐内清洗和罐外减量化工艺进行控制,相比较现有技术,降低了回收成本,同时提高了回收率。
[0051]
2、在本原油储罐智能清洗产物减量化方法中,设计了路径规划的机器学习算法,将罐底油泥分布进行电子地图测绘并通过q-learning算法与ε-greedy策略对清洗机器人的清洗路径进行规划能实现工控机自主控制清洗机器人进行清洗作业,同时于工控机数据库中可对比清洗前后的罐底油泥分布情况可考虑进行二次清洗路径的训练,极大的保证了清洗效果。
[0052]
3、在本原油储罐智能清洗产物减量化方法中,在针对清洗机器人的路径规划时,设置奖励机制,该设定中排除清洗机器人处于边界以及碰撞条件下,计算清洗机器人实时位置与目标点位置距离的反比函数以获取奖励用于训练,该反比函数的设计保证了训练路径的准确性。
[0053]
4、在本原油储罐智能清洗产物减量化方法中,针对于油田油罐的分布特点以及油泥的物性参数设计了撬装式的油泥减量化处理装置,由预处理器、卧螺机、卧式油水分离器完成三相分离,回收原油,裂解炉对分离后的污泥进行无害处理,设计配套的智能化监控算法,实时监测减量化处理系统产物是否符合标准,调节后处理系统的工作条件,真正做到保证减量化处理效果的前提下达到资源合理利用的目的。
[0054]
5、在本原油储罐智能清洗产物减量化方法中,建立起完善的智能化控制系统,可以完整采集工业数据,为之后的工业分析与系统升级提供数据支撑,整个系统能够实现资源回收、环保节能的目的。工程化之后能够获得巨大的社会效益与环境效益。
附图说明
[0055]
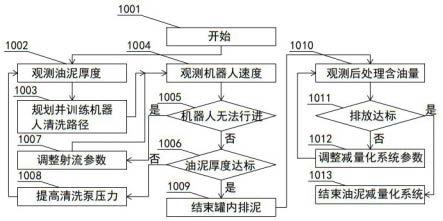
图1为原油储罐智能清洗产物减量化方法流程图。
[0056]
图2为原油储罐智能清洗产物减量化系统示意图。
[0057]
图3为原油储罐智能清洗产物减量化系统预处理器结构示意图。
[0058]
图4为原油储罐智能清洗产物减量化系统油水分离器结构示意图。
[0059]
图5为原油储罐智能清洗产物减量化系统油水分离器排泥漏斗结构示意图。
[0060]
图6为图5俯视图。
[0061]
其中:1、驱动机构2、电机座3、清洗水入口4、预处理器上盖5、桨叶6、预处理腔7、含油污泥出口8、支座9、预处理器底座10、含油污泥入口11、加药口12、入口构件13、进液管14、放空口15、稳流构件16、筒体17、聚结构件18、收油装置19、鞍式支座20、收油口21、双向集液
构件22、排水口23、分离器底座24、排泥漏斗25、排泥口26、封头27、漏斗顶盖28、漏斗体29、排泥管30、顶盖开孔。
具体实施方式
[0062]
图1~6是本发明的最佳实施例,下面结合附图1~6对本发明做进一步说明。
[0063]
如图1所示,一种原油储罐智能清洗产物减量化方法,包括如下步骤:
[0064]
步骤1001,开始,根据原油储罐的体积大小、原油储罐中水、油、泥的比例和指标要求(处理能力、污泥含水率),设计原油储罐智能清洗产物减量化系统(以下简称减量化系统)。
[0065]
如图2所示,减量化系统包括原油储罐,在原油储罐内设置有清洗机器人,在原油储罐外设置有清洗泵,清洗泵通过管路与清洗机器人相连,通过清洗机器人对原油储罐内进行清洗。在对清洗机器人进行吊装时,首先在原油储罐顶部安装滑轮,将清洗机器人吊至罐顶;铺设搭载板,引导清洗机器人由罐顶边缘运行至塔顶的人孔附近;在人孔上部架设带有滑轮的三脚架,并将清洗机器人吊送至原油储罐内。
[0066]
在原油储罐外部还设置有抽污泵,抽污泵将原油储罐内的油泥抽出后送入预处理器中。预处理器的出口连接离心机,离心机的出口分别连接油水分离器和裂解炉,经离心机分离得到的油水混合物送入油水分离器中进行油水分离,分离出的污水和油分别送入污水缓冲罐以及原油储罐;经离心机分离出的泥沙送入裂解炉进行处理。
[0067]
如图3所示,预处理器包括预处理器底座9,在预处理器底座9的表面以撬装的形式设置有多个支座8,在支座8之间设置有预处理腔6,在预处理腔6的上端口处设置有预处理器上盖4,在预处理器上盖4的两侧设置有与预处理腔6内连通的加药口11和清洗水入口3。在预处理腔6的顶部一侧设置有用于向预处理腔6内送入油泥的含油污泥入口10,在预处理腔6的底部设置有含油污泥出口7。在预处理器上盖4上通过电机座2固定有驱动机构1,驱动机构1包括驱动电机以及与驱动电机相连的减速器,在减速器的输出轴上同轴固定有搅拌轴,搅拌轴向下穿过预处理器上盖4之后进入预处理腔6内,在搅拌轴的下部设置有用于对预处理腔6内含油污泥进行搅拌的桨叶5。
[0068]
通过预处理器来实现含油污泥、水和清洗剂的混合,并进行充分搅拌。预处理器采用两级搅拌叶片串联工作以提高搅拌效果,并设计腿式支座实现设备的撬装化,便于移动生产。同时根据设计条件,进行搅拌功率的计算、筒体结构设计计算、轴径计算。通过计算物料体积流量、雷诺数根据下式:
[0069][0070][0071]
其中:pj表示搅拌功率;np表示功率准数;表示物料的平均密度;n表示叶轮转速;d表示叶轮直径。结合上述计算搅拌功率、许用应力以及叶轮转速数据,根据下式计算搅拌轴轴径:
[0072][0073]
其中:d3表示轴径;pj表示搅拌功率;[τ]表示许用切应力;n表示叶轮转速。
[0074]
经预处理器处理后,需要进一步进行液固分离,在本减量化系统中,选用lw系列卧式螺旋卸料沉降离心机来实现液固分离。设计多级离心处理方案,第一级离心机工作结束后,将离心产物输送到下一级离心机进行多次离心,在各级离心机出口设置颗粒物浓度传感器,检测油泥混合体中固体颗粒物的含量,将数据指标传递给工控机,工控机判断油泥混合物是否符合分离标准,并决定重复清理次数,直到油泥混合物浓度低于指标。
[0075]
如图4所示,油水分离器包括分离器底座23,在分离器底座23的表面通过鞍式支座19安装有筒体16,在筒体16的两端设置有封头26。在筒体16一端的顶部设置有入口构件12,入口构件12采用孔箱式入口构件,主要作用是吸收进入油水分离器的高速液流的动能,减少入口射流对流场的冲击和扰动。在筒体16的顶部还设置有放空口14。
[0076]
在入口构件12进入筒体16内部之后通过进液管13接入排泥漏斗24中,排泥漏斗24的排出管向下穿过筒体16后引出,作为排泥口25。在排泥漏斗24的一侧设置有稳流构件15,稳流构件15采用散装填料箱式稳流构件,其作用是稳定和改善主分离区的流动条件,使其更有利于分离过程的进行,避免主分离区仍然存在的二次涡流和回流现象。
[0077]
在稳流构件15的一侧设置有聚结构件17,聚结构件17在重力式油水分离器中的作用主要是强化设备的分离性能。在筒体16相对于入口构件12的另一端设置有收油装置18,收油装置18位于相应侧封头26的内壁上,在收油装置18处还引出有收油口20,收油口20自封头26处引出。在收油装置18的底部设置有双向集液构件21,通过双向集液构件21使可能多的设备空间用于分离,从而最大限度的提高设备的容积利用率,在双向集液构件21的底部设置有排水口22。
[0078]
如图5~6所示,排泥漏斗24包括漏斗体28,漏斗体28的下部为锥形,在锥尖处设置有排泥管29,排泥管29穿过上述的筒体16后引出。在漏斗体28的上端口处设置有漏斗顶盖27,上述的进液管13从漏斗顶盖27的中心处垂直进入漏斗体28内,在漏斗顶盖27的表面还开设有若干顶盖开孔30。
[0079]
由于离心机不可能把泥沙完全除去,进入油水分离器的油水混合物中仍有少量泥沙,如不处理时间长了会堵塞稳流构件15的散装填料,使分离无法进行,因此必须除去泥沙。针对以上问题,通过排泥漏斗24,排泥漏斗24利用重力沉降原理,从入口来的油水泥混合物,经入口构件12消能后,沿进液管13进入排泥漏斗24,含油污水经过沉降后由顶盖开孔30溢出,防止流出的液体流速过高或者存在强烈的湍流,起到稳流作用,降低对主分离区的冲击和扰动,
[0080]
裂解炉在常规裂解炉的基础上在原有裂解炉型基础上,将预热段和加热段炉膛内的燃气喷嘴更换成围绕炉膛的电阻丝,电阻丝加热均匀,升温较快,且不会产生氮氧化物,通过更换裂解炉加热热源,实现裂解处理过程低碳环保的目的。
[0081]
经离心机脱水处理后的含油污泥由上料机构输送到电热裂解炉中,含油污泥经过螺旋推进器在在炉管内缓慢推进,炉膛内平均温度700℃,炉管内含油污泥与炉膛内高温循环气充分换热,炉管内温度达到550℃,把含油污泥的水分及原油轻组分蒸馏出来,并热解
原油的重组分,蒸馏组分温度约400℃,蒸馏出来的混合物进入热交换装置与燃料气进行换热,将燃料气预热。之后进入喷淋冷却装置,在喷淋冷却装置油气冷却到50℃,冷却水温度从30℃增加到50℃,汽油组分、柴油组分等组分冷却下来,油水混合物泵输送到油水分离器中进行油水分离。
[0082]
对于从裂解炉中排出的含油污泥的含油量进行软测量并上传到工控机建立含油量数据库,作为后续软测量技术机器学习的数据,并且与国家标准进行对比,若含油量不达标则通过调节预处理装置转速、加药量、离心机转速、裂解装置温度等参数对含油量进行实时控制,既可以实现含油污泥的含油量得到完全控制,并且可以根据含油量的多少动态调节加药量、离心机转速达到节能减排的目的。建立起以工控机为核心的于机器学习数据采集、实时智能控制为一体的原油储罐智能清洗产物减量化系统。
[0083]
喷淋冷却装置不能冷却的不凝气体进入液封及气体缓冲罐,这部分气体与外来天然气混合,经过气体缓冲罐稳压后,通入热交换装置与从加热炉出来的热解气热量交换,温度升高后作为加热炉燃烧器的燃料,实现热解气的回用,热解完的含油污泥土质松散达到外排要求。
[0084]
步骤1002,观测油泥厚度;
[0085]
利用原油储罐内声纳探测装置与清洗机器人的声纳探测装置测量原油储罐内油泥分布情况,并建立油泥分布数据库供工控机进行调用;
[0086]
在清洗机器人前方和正下方搭载声纳,实时监测前方污泥状况,并将信息传输到工控机建立油泥分布数据库,工控机进行实时分析,并发出指令,如前方油泥较厚/薄时,智能反馈到变频器,从而调节清洗泵出口水压。
[0087]
步骤1003,规划并训练机器人清洗路径;
[0088]
清洗机器人通过正下方搭载的声纳,将冲洗后的污泥状况实时监测反馈到工控机并实时更新步骤1002中建立的油泥分布数据库。工控机预先设置油泥清理指标,清理清洗机器人到达油罐底层油泥区域后,声纳开始工作,采集到油泥分布信息,工控机通过q-learning算法以及ε-greedy策略计算出清洗机器人最短行进路线并进行训练,训练过程如下:
[0089]
步骤1003-1,初始化各参数,根据声纳探测得到的罐底油泥分布数据库绘制电子地图并进行灰度化处理;
[0090]
步骤1003-2,根据油泥分布情况规划一条最优路径并对路径进行多点分段处理;
[0091]
步骤1003-3,初始化训练模型数据,并且记录下当前q值,通过ε-greedy策略找到最大q值对应动作;
[0092]
在本步骤中,设置有奖励机制r,具体包括如下步骤:
[0093]
步骤1003-3-1,清洗机器人处于罐体以外区域或与原油储罐内障碍物相碰时,则会获得一个较大的负数奖励;
[0094]
步骤1003-3-2,当清洗机器人处于目标点时,获得一个较大的正数奖励;
[0095]
步骤1003-3-3,排除以上两种情况,清洗机器人则会按照设定的清洗机器人所处位置与目标点位置距离的反比函数来获取奖励。
[0096]
该奖励机制中应用计算两点间距离的反比函数来获取奖励值的方法能够使清洗机器人在越靠近目标点时获取的奖励值越大,而能够训练出一条最优的自主避障路径,奖
励函数如下式所示:
[0097][0098]
式中:a0表示一个正值,经过仿真调试选取;k为比例系数,经过仿真调试选取;(x0,y0)为清洗机器人当前所处坐标;(x
goal
,y
goal
)为预期到达目标点坐标。
[0099]
清洗机器人经过训练后开始清理工作,第一次清理工作结束,声纳会在油泥沉降之后,重新采集油泥分布信息并与先前数据库进行对比,获得清理效果较差区域形成新的电子地图,工控机对新电子地图进行路径规划训练并发出清理指令,对清洗效果不佳的区域进行二次清理,工控机会在每一次油泥沉降之后不断更新原油储罐内油泥分布数据库,进行油泥含量评估,决定重复清理次数,直到油泥含量低于指标,清理结束。
[0100]
步骤1003-4,获取下一位置信息并利用更新相应q值;
[0101]
步骤1003-5,判断所处位置是否为油泥聚集点,若为目标点进入步骤(5),否则返回步骤1003-2;
[0102]
步骤1003-6,判断训练是否达到迭代次数,若达到设定值则进入步骤1003-7,否则返回步骤1003-3;
[0103]
步骤1003-7,结束。
[0104]
步骤1004,观测机器人速度;
[0105]
利用清洗机器人罐中定位系统观测清洗机器人在原油储罐内的移动速度,并建立机器人移动速度数据库;
[0106]
步骤1005,清洗机器人是否无法行进;
[0107]
工控机判断清洗机器人是否无法行进,如果无法行进,执行步骤1007,如果清洗机器人正常行进,执行步骤1006。
[0108]
清洗机器人采用“气动+水力”双驱动方式,清理机器人通过声纳采集位置信息,工控机进行速度和位置分析,并发出指令,清理机器人开始行进,清理机器人在油罐底部主要通过气动驱动车轮行进,在遇到油泥较厚或工况较复杂时,机器人行进较为缓慢,在声纳实时采集位置信息后,工控机通过计算机器人实时的行进速度,并根据步骤1002建立的油泥分布数据库,综合判断机器人行进难度,工控机将指令反馈到变频器,变频器可通过改变阀门开度和清洗泵出口方向,调整水压大小,为清洗机器人提供辅助动力,从而达到水力辅助驱动的作用。
[0109]
步骤1006,判断油泥厚度是否达标;
[0110]
工控机调用油泥分布数据库对清洗机器人所处位置的油泥厚度进行估计,判断油泥厚度是否达标,如果达标,执行步骤1009,如果不达标,执行步骤1008。
[0111]
步骤1007,调整射流参数;
[0112]
工控机调用油泥分布数据库与清洗机器人速度数据库综合估计清洗机器人行进
难度,调节射流喷嘴射流压力以及射流角度,并返回步骤1004。因为油泥厚度与行进难度成正比关系,故增大射流压力可以达到辅助驱动与增强清洗能力的双重作用。
[0113]
步骤1008,提供清洗泵压力;
[0114]
工控机根据油泥厚度调节清洗泵射流压力,以达到彻底清洗的目的。
[0115]
步骤1009,结束原油储罐内排泥。
[0116]
步骤1010,观测后处理含油量;
[0117]
利用软测量技术对减量化系统产物含油量进行测量,建立减量化系统产物含油量数据库。
[0118]
步骤1011,判断排放是否达标;
[0119]
工控机调用减量化系统产物含油量数据库,对产物含油量与国家标准进行对照,判断含油量是否达标,如果达标,执行步骤1013,如果不达标,执行步骤1012。
[0120]
步骤1012,调整减量化系统参数;
[0121]
工控机调节预处理器搅拌器转速、加药量、离心机转速、裂解装置温度等参数,使其在保证处理效果的情况下达到节能减排的效果。
[0122]
步骤1013,结束油泥减量化系统。
[0123]
并且建立油罐内部数据库,对于日后设备故障诊断、过程监控以及本智能化系统的机器学习精度提升提供数据基础。
[0124]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1