基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法与流程
1.本发明涉及故障检测领域,尤其涉及一种基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法。
背景技术:
2.走行部是现代轨道车辆核心系统,已经成为高度复杂的机电设备,其运行过程依赖于机械、热力学、机电、电子和计算机等多领域设备的协调运行,同时具有运行环境复杂、服役时间长等显著特点。因此,利用蓬勃发展的机器学习和大数据技术,实现走行部在线故障检测和预测,从而提高轨道车辆安全性和出勤率,已经成为轨道交通装备技术发展的关键趋势。
3.走行部故障通常通过轴箱轴承温度进行监测。目前温度传感器已得到广泛部署,一般轨道车辆每轴配置8个传感器,其中2个分别放置于轮轴两端以感知环境温度,剩下的6个传感器均匀布置于轮轴两段的2个轴承上,分别部署在轴承的左上方、上方和右上方。由于轮轴故障时一般轴温出现飞跃式变化,因此,直接根据温度阈值难以提前发现故障,通常需要进行一定的机理分析建立故障检测和预测模型。但是,走行部集成了多种机电部件,来源极为多样化,精确的机理分析难以实施。
技术实现要素:
4.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法,学习轨道车辆走行部结构特征作为健康基线,支持在线实时异常检测。
5.为解决上述技术问题,本发明提出的技术方案为:
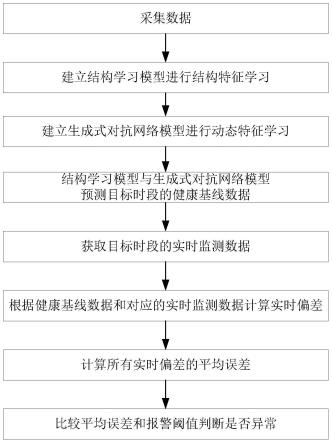
6.一种基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法,包括以下步骤:
7.采集轨道车辆走行部的传感数据,并保存在数据库中;
8.建立结构学习模型和生成式对抗网络模型,对所述结构学习模型训练时根据ffx算法和deap算法筛选最优模型并进行简化,简化后的最优模型根据数据库的历史数据预测目标时段的传感数据,生成式对抗网络模型根据目标时段的传感数据预测值和实际值生成目标时段的数据序列,将结构学习模型和生成式对抗网络模型的结果叠加作为健康基线数据;
9.获取目标时段内轨道车辆走行部的传感数据作为实时监测数据,根据实时监测数据和对应的健康基线数据计算实时偏差;
10.计算目标时段中所有实时偏差的平均误差,若平均误差大于预设的报警阈值,判断出现异常。
11.进一步的,建立结构学习模型的具体步骤包括:
12.设定运算子集合p作为基函数集合ψ的初始值,将因变量x作为操作数,以及对应的目标变量y作为评估指标计算的参考;
13.从基函数集合ψ选择目标基函数作为运算子或操作数,并将其加入到当前基函数集合中,重复本步骤,直到当前基函数集合的大小和质量达到预设的迭代触发阈值;
14.对当前基函数集合与模型参数进行融合得到当前模型,用当前模型根据因变量对目标变量进行估计,通过计算目标变量的估计值和实际值的误差学习模型参数;
15.通过模型评价指标对当前模型的质量进行评价,若当前模型的质量不满足要求则返回设定运算子集合p作为基函数集合ψ的初始值的步骤,或者返回从基函数集合ψ选择目标基函数作为运算子或操作数的步骤,若当前模型的质量满足要求则输出当前模型。
16.进一步的,当前模型的表达式如下:
[0017][0018]
上式中,i=1,...,nb,为目标变量估计值,x为因变量,为x1到xm的合并矩阵ψi为当前基函数集合,ai为ψi中各基函数的系数,b为偏移量,nb表示基函数集合个数,m为输入数据维数,x1到xm分别表示m个观测变量,即m个传感器的传感数据。
[0019]
进一步的,所述模型评价指标具体包括:
[0020]
模型优化目标:以最小化目标变量的估计值和实际值的误差平方和为优化目标,即准确性因子;
[0021]
模型泛化性:用准确性因子和复杂度因子度量模型准确率和模型复杂度,使用模型复杂度作为模型的约束,与准确性因子进行约束求解,同时保证模型的准确性和泛化性。
[0022]
进一步的,所述准确性因子表达式如下:
[0023][0024]
上式中,rmse是标准的均方根误差,ti为采样点t的第i个时刻,y
ti
为采样点t的第i个时刻的目标变量观测量,为采样点t的第i个时刻的目标变量估计量,n为目标变量y向量的大小。
[0025]
所述复杂度因子由基函数个数表示,表达式如下:
[0026][0027]
上式中,x为因变量,为x1到xm的合并矩阵,ai为基函数集合ψi中各基函数的系数,b为偏移量,nb表示基函数集合个数,f(x)为结构学习模型。
[0028]
进一步的,用准确性因子和复杂度因子度量模型准确率和模型复杂度时对两者进行平衡,表达式如下:
[0029]
l=rmse+λc,λ∈[0,1]
[0030]
上式中,rmse为准确性因子,c为复杂度因子,λ为准确性和复杂度之间的平衡因子。
[0031]
进一步的,对所述结构学习模型训练时根据ffx算法和deap算法筛选最优模型并进行简化的具体步骤包括:
[0032]
生成基函数集;
[0033]
识别最优基函数并使用路径规整学习进行参数学习;
[0034]
根据最小化错误率和复杂度过滤冗余候选函数,得到最优模型集,将最优模型集作为种群;
[0035]
根据遗传算法,对所述种群繁殖产生子孙候选集,并进行突变和交叉操作;
[0036]
对子孙候选集进行评估,根据评估结果选择优秀子孙构成种群并返回上一步,直到种群收敛,输出种群对应的最优模型集。
[0037]
进一步的,所述生成式对抗网络的生成器包括微分方程生成器,微分方程生成器表达式如下:
[0038][0039]
其中,t∈[0,1],生成g由多个子网络组成,每个子网络学习特定波形的动态特征,系统状态h=y-y^,y为目标变量实际观测值,且y^为目标变量估计值,z为随机噪音,θg为生成式对抗网络的网络参数。
[0040]
进一步的,所述生成式对抗网络的生成器包括微分方程求解器,公式如下:
[0041]ht+1
=odetimestep(h
t
,δ,g(h
t
,t,z;θg))
[0042]
其中,t∈[0,1],生成器g由多个子网络组成,每个子网络学习特定波形的动态特征,h
t
为生成样本,δ为步长。
[0043]
进一步的,所述生成式对抗网络模型的判别器使用rnn分类进行判断。
[0044]
与现有技术相比,本发明的优点在于:
[0045]
本发明建立结构学习模型和生成式对抗网络模型,能够将学习到的系统结构特征作为健康基线,并且对模型进行择优和简化,在实时异常检测过程中,利用结构学习模型和生成式对抗网络模型估计出健康基线,并根据健康基线与实时监测数据的平均误差与报警阈值的大小关系来判断是否存在异常,实现对于轨道车辆走行部异常检测的动态实时跟踪。
附图说明
[0046]
图1为本发明实例中结构学习模型与生成式对抗网络关系图
[0047]
图2为本发明实施例中建立结构学习模型的流程图。
[0048]
图3为本发明实施例中生成式对抗网络结构示意图
[0049]
图4为本发明实施例中结构学习模型和生成式对抗网络模型对某个轴温的结构特征的训练结果示意图。
[0050]
图5为本发明实施例的流程示意图。
[0051]
图6为本发明实施例的方法流程图。
具体实施方式
[0052]
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
[0053]
符号定义
[0054]
假设数据采样点为t=[t1,t2,...,tn],以时间为单位非递减有序,默认等间隔。
[0055]
假设一次采样结果为(x,y),其中x为因变量,y为目标变量。因变量x∈rn×m,如公式(1)所示,是n行和m列矩阵,n行表示对应t的n个时刻的观测结果,m列表示m个不同观测变量。
[0056][0057]
目标变量y如公式(2)所示,是对应t的n个时刻的观测结果。
[0058]
y=[y(t1),y(t2),...,y(tn)]
t
[0059]
(2)
[0060]
假设有运算子集合p,如公式(3)所示,其中每个元素表示一个基本的算数运算。当前运算包括:加法运算add(x,y)表示两个输入向量的和,即返回x+y;减法运算sub(x,y),表示两个输入向量的差,即返回x-y;乘法运算mul(x,y),表示两个输入向量的点积,即返回x*y;除法运算divide(x,y),表示两个输入向量的商,即返回x/y;正弦运算sin(x),返回输入向量的正弦运算结果;余弦运算cos(x),返回输入向量余弦运算结果;对数运算log(x,i),返回输入向量的对数运算结果,即返回logi(x);幂运算pow(x,i),返回输入向量的幂运算结果,即返回xi;取最大值运算max(x),返回输入向量的最大值;取最小值运算min(x),返回输入向量的最小值。
[0061][0062]
基函数向量ψ,定义如公式(4),一共有nb个元素,其中每个元素φi表示一个基函数,基函数是由运算子集合p中若干个运算子构成的线性或非线性复杂函数。
[0063][0064]
通常对设备数据进行分析时,需要使用机理和数据联合方法。然而,轨道交通装备的复杂化,使得精确的设备机理模型难以建立,而制造业的全球化进程和复杂的设备所有权关系,又加剧了知识碎片化趋势,在实践工作中经常难以开展机理引导的数据分析。因此,利用数据驱动技术进行结构学习,从而建立能够准确预测设备数据变化趋势的机器学习模型,具有极其重要的现实意义。
[0065]
ffx(确定性优化)算法和deap遗传编程算法提供了作为结构生成以及参数学习引擎的启示,前者可以用于生成初始解,而后者则可以用于对ffx产生的结果进行修剪以形成更简化的模型。
[0066]
如图1所示,本实施例提出一种基于符号回归的结构学习模型,融合确定性优化算法和遗传算法完成训练,由此揭示系统的底层物理机理。因为符号回归是一个np-hard问题,搜索完全可表达的的表达式并不总是可行的,还使用生成式对抗神经网络,通过残差学
习来学习系统的动态特征。
[0067]
如图2所示,构建结构学习模型的流程如下:
[0068]
1)初始化:根据公式(3)设定运算子集合p,作为基函数集合ψ的初始值,输入因变量x作为操作数,x为x1到xm的合并矩阵,x1到xm分别表示m个观测变量,即m个传感器的传感数据,以及对应的目标变量y(即轴箱轴承温度,后文简称轴温)作为评估指标计算的参考;
[0069]
2)结构生成:按照专家经验或者遍历的方式,从基函数集合ψ优选若干个基函数作为运算子或操作数组合形成新的更复杂的基函数,并将其加入到当前基函数集合ψi中,以此循环迭代,通过预设评价标准的结构评价指标来控制基函数集的大小和质量,当前基函数集合ψi的大小和质量达到迭代触发阈值时停止,并将当前基函数集合ψi输入到下一环节;
[0070]
3)参数学习:对输入的当前基函数集合ψi进行融合,得到当前模型,通过当前模型对目标变量进行估计,随机初始化模型参数,通过计算目标变量的估计量和实际观测量y的误差来进行模型参数学习,当前模型的表达式如下:
[0071][0072]
上式中,i=1,...,nb,为目标变量估计值,x为因变量,ψi为当前基函数集合,ai为ψi中各基函数的系数,b为偏移量,nb表示基函数集合个数,m为输入数据维数,模型参数学习即对参数{ai},i=1,...,nb和b进行学习;
[0073]
4)模型选择:通过模型评价指标对当前模型的质量进行评价,从而作出是否接受当前学习结果的决策,若对学习结果不满意则返回第2步,甚至可以返回第1步对模型输入进行调整。若对学习结果满意,则将当前模型输出。
[0074]
本实施例中,模型评价指标包括:
[0075]
模型优化目标:即准确性因子,以最小化目标变量的估计值和实际值的误差平方和为优化目标,即最小化以下等式:
[0076][0077]
上式中,rmse是标准的均方根误差,n为目标变量y向量的大小,ti为采样点t的第i个时刻,表示采样点t的第i个时刻的目标变量估计量,y
ti
表示采样点t的第i个时刻的目标变量观测量。
[0078]
模型泛化性:不同于一般的回归方法,本实施例同时考虑模型准确率和模型复杂度分别由准确性因子和复杂度因子度量,采用准确性和复杂度之间的平衡因子λ对两者进行平衡,如公式(7)。准确性因子为估计值和真实值的误差平方和,表达式如式(6)所示。复杂度因子由模型规模度量,即为c,如公式(8),表达式如下:
[0079]
l=rmse+λc,λ∈[0,1](7)
[0080][0081]
上式中,rmse为准确性因子,c为复杂度因子,λ为准确性和复杂度之间的平衡因
子,x为因变量,为x1到xm的合并矩阵,ai为基函数集合ψi中各基函数的系数,b为偏移量,nb表示基函数集合个数,f(x)为结构学习模型,size()公式上说明复杂度因子为标准函数,这里使用l0范数的方法限制模型的复杂度,λ作为准确性和复杂度之间的平衡因子,相当于在约束复杂度的前提下,求解准确性的模型,是一个约束求解问题。
[0082]
可以看出,复杂度因子c由基函数个数表示,基函数越多说明函数越复杂,进而表明复杂度越差,l的值随着迭代过程越来越小,l的值越小,当前模型的评价越高。
[0083]
5)结束:最后框架的输出为一个或若干个优选的模型,并给出各模型的评价(即式(7)的l)。这些模型可以表达系统的底层动态特性和运行机理,还可以为后期其他任务提供支持。这些优选的模型表达式如下:
[0084][0085][0086]
上式中,i=1,...,nb,为目标变量估计值,x为因变量,为x1到xm的合并矩阵,ψi为当前基函数集合,ai为ψi中各基函数的系数,b为偏移量,nb表示基函数集合个数,m为输入数据维数,x1到xm分别表示m个观测变量,即m个传感器的传感数据,f1至f
nm
为要求解的模型,m为求解模型的集合,nm为求解模型集合的大小。
[0087]
构建结构学习模型之后,对于结构学习模型的训练过程中,首先执行ffx算法获取初始解,有以下3步:
[0088]
1)通过确定性的方式产生一个大规模的基函数集;
[0089]
2)结构生成步骤中,从基函数集合ψ优选若干个基函数时,识别最优的基函数,并在参数学习的步骤中通过计算目标变量的估计量和实际观测量y的误差来进行模型参数学习时,使用路径规整学习进行参数学习;
[0090]
3)模型选择的步骤之后,通过每个模型对应的参数l,以及最小化错误率和复杂度的目标过滤掉冗余候选的基函数;
[0091]
通过上述步骤,筛选出最优模型集m,将ffx输出的最优模型集m进行解析,由此得到基函数集作为deap遗传编程的初始输入,即作为初始种群,然后循环执行以下3个步骤,直到收敛为止:
[0092]
1)繁殖步:基于当前种群的候选集产生子孙候选集,并通过突变和交叉操作保证种群的多样性;
[0093]
2)评估步:对上一步产生的子孙候选集进行评估;
[0094]
3)选择步:基于上一步的评估结果选择优秀的子孙候选集构成下一代的种群。
[0095]
通过上述步骤,收敛种群的候选集中的模型即为简化后的最优模型。
[0096]
如图3所示,本实施的生成式对抗网络模型学习动态特征包括以下步骤:
[0097]
首先,生成器获取系统初始状态h0和随机噪音z后生成假样本的序列,生成器由微分方程生成器和微分方程求解器组成,微分方程生成器使用如下结构:
[0098]
[0099]
这里,t∈[0,1],生成g由多个子网络组成,每个子网络学习特定波形的动态特征,系统状态h用于模拟系统的动态特征,来自符号回归预测量与观测值的差,y为目标变量实际观测值,且为目标变量估计值,θg是生成式对抗网络的网络参数,初始来自随机,通过生成器的迭代训练而来,这里采用一般生成式对抗网络采用相同的训练方法。
[0100]
微分方程求解器使用数值积分方法求解常微分方程,公式如下:
[0101]ht+1
=odetimestep(h
t
,δ,g(h
t
,t,z;θg))(11)
[0102]
其中h
t
为生成样本,δ为步长,h
t+1
=h
t
+δ*dh/dt。
[0103]
然后判别器获取样本序列,并给出样本为真的概率,判别器主要用于判断序列是否为生成序列,这里使用rnn分类判断序列为生成序列还是实际序列。
[0104]
本实施例中使用简化后的最优模型符号归回的结果与生成式对抗网络模型的序列生成结果进行叠加,作为异常监测的预测值。
[0105]
对于简化后的最优模型与生成式对抗网络模型,选取某型电力机车,在1000次正常运行过程中采集的数据集上进行交叉验证(针对一次运行,前50%的数据作为训练集,后50%作为验证集),学习6个轴温的结构特征,标号分别为zx_wd_1,zx_wd_2,zx_wd_3,zx_wd_4,zx_wd_5,zx_wd_6。其中第四个轴温的结构特征zx_wd_4学习的实验结果如图4所示。
[0106]
实验结果表明,简化后的最优模型所学结构特征与生成式对抗网络模型学习的动态特征具有很好的可解释性,表达了多元信号间的相互作用关系,对真实数据的运行轨迹具有很好的拟合能力,可作为系统正常状态的基准。因此将学习到的系统结构特征与系统的动态特征作为健康基线,支持在线实时异常检测框架各类应用。
[0107]
如图5和图6所示,基于本实施例的结构学习模型和生成式对抗网络模型,本实施例提出一种基于符号回归和生成式对抗网络的轨道车辆走行部异常检测方法,包括数据采集、特征学习和在线实时异常检测三个阶段。
[0108]
在第一阶段,采集轨道车辆走行部的轴温的传感数据,并保存在数据库中,列车运行过程产生的数据主要通过传感器进行采集。有两个主要的数据流向,一方面,采集的数据将会被传输到数据中心的数据库中进行有效存储;另一方面,实时感知数据将会作为在线实时异常检测的输入。
[0109]
在第二阶段,建立结构学习模型和生成式对抗网络模型,对所述结构学习模型训练时根据ffx算法和deap算法筛选最优模型并进行简化,简化后的最优模型可根据数据库的历史数据预测目标时段的传感数据,生成式对抗网络模型获取目标时段的传感数据预测值与对应实际观测值之差,生成目标时段的数据序列,将简化后的最优模型预测值与生成式对抗网络模型的生成序列叠加作为健康基线数据,使用前述的训练方法进行结构特征学习与动态特征学习,形成特征表达式作为健康基线形成结构表达式并进行模型部署。
[0110]
在第三阶段,获取目标时段内轨道车辆走行部的传感数据作为实时监测数据,根据实时监测数据和对应的健康基线数据计算实时偏差,然后计算目标时段中所有实时偏差的平均误差,若平均误差大于预设的报警阈值,判断出现异常,具体包括以下步骤:
[0111]
1)获取结构学习模型的计算结果,并与生成式对抗网络模型的计算结果叠加作为健康基线:
[0112]
其中结构学习模型的计算结果为简化后的最优模型f
best
预测目标时段的传感数
据,即通过下式估计最近w个时刻内的轴温的信号轨迹得到:
[0113][0114]
上式中,y
t1
……ytw
分别表示采样点t的第i个时刻的目标变量估计量;
[0115]
生成式对抗网络模型的计算结果为生成式对抗网络模型对预测量与观测值的残差h学习到的目标时段的序列将信号轨迹与对应的序列叠加得到僻康基线预测值;
[0116]
2)获取实时感知数据:通过传感器获取最近w个时刻内的轴承温度实时监测数据y;
[0117]
3)残差生成:健康基线预测值y^和实时监测数据y被同时输送到残差生成器,残差生成器通过下式计算系统实时偏差:
[0118][0119]
上式中,和y
ti
分别表示采样点t的第i个时刻的目标变量观测量和健康基线预测值;
[0120]
4)误差估计:计算平均误差,表达式如下:
[0121][0122]
上式中,w为目标时段的时刻数量,ri为第i个时刻的轴承温度实时监测数据和对应健康基线的误差,用平均误差进行误差估计主要基于以下考虑:(a)由轴承内部温度可知,系统失效时轴承温升遵循指数方程,平均误差足以发现异常;(b)整个在线异常检测框架需要满足实时计算,工程实践中仍难以支持过于复杂的评估方法;
[0123]
5)异常决策:基于误差估计的结果,通过下式作出是否报警的决策:
[0124][0125]
其中α为报警阈值,根据实际应用需求而定,当目标时段的平均误差大于该报警阈值时,说明出现异常,则进行报警。
[0126]
综上所述,本实施例具有以下优点:
[0127]
1)数据驱动自动化机理挖掘
[0128]
针对复杂装备机理不全导致无法建立精确机理模型的问题,利用数据驱动技术进行结构学习,从而建立能够准确预测设备数据变化趋势的机器学习模型,实现机理重建和系统辨识。一方面,系统结构特征可反映系统的动态性和信号间的相互作用关系;另一方面,将系统结构特征作为系统运行时的健康基线,设计在线实时异常检测框架。为构造数字孪生提供了新的技术路线。
[0129]
2)基于符号回归的系统结构特征学习方法
[0130]
提出融合确定性优化算法和遗传算法的符号回归的系统结构特征学习方法。本文
融合ffx和deap作为框架中结构生成以及参数学习引擎。前者用于生成初始解,而后者则用于对ffx产生的结果进行修剪以形成更简化的模型。
[0131]
3)机理健康基准线驱动故障检测
[0132]
针对复杂装备故障数据所特有的小样本、长尾分布特点,采用基于正常运行数据提炼反映装备状态趋势的基准线模型、进而在基准线引导下进行异常行为监测和故障模式学习的思路,在技术路线上具有较强的创新性。
[0133]
4)使用生成网络学习动态特征
[0134]
因为符号回归是一个np-hard问题,搜索完全可表达的的表达式并不总是可行的,使用生成式神经网通过残差学习学习系统的动态特征。
[0135]
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1