一种基于TOF相机的露天矿卡车装载体积测量方法与流程
一种基于tof相机的露天矿卡车装载体积测量方法
技术领域
1.本发明属于矿山智能化技术领域,尤其是涉及一种基于tof(飞行时间测量)相机的露天矿卡车装载体积测量方法。
背景技术:
2.露天矿生产过程中,运输成本占生产总成本的60%,卡车计量工作的准确与否对矿山企业的成本管理、司机考核都具有十分重要的意义。
3.卡车装载体积测量比较成熟的方法有三维激光扫描法和摄影测量方法。三维激光扫描法是对卡车进行扫描测量,获取其三维点云,重建出三维表面模型,最后进行体积计算,目前查到这方面的专利为2020年4月17日公开号cn111023976a的专利“基于线性激光扫描的矿用自卸卡车矿石方量检测装置及方法”;摄影测量方法从多个视角拍摄卡车,采用数字摄影测量技术重建卡车装载物的表面三维模型,通过体积积分计算卡车装载体积。三维激光扫描设备昂贵,前期点云图像的拼接处理繁琐,摄影测量后续处理工作量很大。因此,露天矿实际生产过程缺少一种运行低成本、计算处理快速快的卡车体积测量方法。
4.tof(time of flight)即飞行时间相机,通过计算传播媒介在空气当中的传输时间,进而测算被测物体的距离,是近年来随着精密电子技术和现代微电子工艺技术的蓬勃发展而发展起来的新技术。目前有关tof相机的研究工作主要在以下两个方向:一是tof相机本身成像系统的研究,包括相机成像时误差产生的各种原因分析和各类偏差校正的方法研究等;二是应用方面的研究,主要是在人机交互、机器人、空间近距离测量以及工业自动化等领域上的应用。采用tof相机进行矿车装载体积测量,首先只需要采集卡车顶部单方向的图像,并不需要采集多个角度的图像再做拼接处理;其次tof相机自带的软体可以直接输出拍摄的点云图,不需要其他的转换方式和操作步骤。具有价格低廉、使用方便、维护简单、运行速度快的特点,设备购置与运行成本显著低于三维激光扫描法,处理与使用也比摄影测量与三维激光扫描简单的多。
5.国内外tof技术在矿山领域的研究和应用还未查到相关文献。
技术实现要素:
6.本发明的目的是提供一种基于tof相机的露天矿卡车装载体积测量方法。
7.1.本发明的一种基于tof相机的露天矿卡车装载体积测量方法,包括在排卸点或开拓运输系统主干道卡车经过的上方安装tof相机模组,其特征在于,包括下列步骤:
8.s1、通过tof相机模组分别采集卡车空车和卡车装载装截图片,并采用smarttofviewer软件处理得到卡车空车的深度图、灰度图和点云图以及卡车装载的深度图、灰度图和点云图;
9.s2、采用图像分割技术,使用cloudcompare软件对卡车空车点云图与卡车装载点云图进行分割和裁剪等预处理,获得分割剪裁后的卡车空车点云与卡车装载点云;
10.s3、将分割剪裁后的卡车空车点云与卡车装载点云采用cloudcompare临近点匹配
法(icp)进行点云配准,使其长宽平面信息相对应;
11.s4、使用配准后的点云,采用立体几何算法计算矿岩装载体积。
12.优选地,所述的s2中使用cloudcompare软件对卡车空车点云图与卡车装载点云图进行分割和裁剪等预处理,包括分割和裁剪两部分,分割操作用于过滤背景的杂点,裁剪剪去卡车外部无关的点云,操作完成后获得分割剪裁后的卡车空车点云与卡车装载点云。
13.优选地,所述的s3采用cloudcompare软件临近点匹配法(icp)进行点云配准,是选中预处理之后卡车装载点云作为配准的移动方,而预处理之后的卡车空车点云作为不进行移动的参考系,通过单击“交换”按钮来交换选择。icp配准是一个迭代过程,在此过程中,两者误差在缓慢减少,并在最大迭代次数后停止过程,或者在两次迭代之间的误差(rms)差异低于给定阈值时立即停止过程,该阈值越小,收敛所需的时间越长,结果也越精细。
14.优选地,所述的s4中的采用立体几何算法计算矿岩装载体积,是采用cloudcompare软件进行体积计算,选择配准后的卡车装载点云作为顶面,选择空车点云作为底面,以卡车车厢四周闭合区为四周边界,之后点击单元格步长数据栏设置步长和点选插值方法,点击更新按键之后,自动进行计算并生成计算结果,计算结果volume即为卡车矿岩装载体积量。
15.本发明的优点:
16.(1)本发明的基于tof相机的露天矿卡车装载体积测量方法,利用廉价的tof相机模组完成测量图像采集的工作,使用方便,维护简单,设备购置与运行成本显著低于三维激光扫描法;
17.(2)与摄影测量法相比,tof相机模组后续处理容易,运行速度快,计算结果精度高。
附图说明
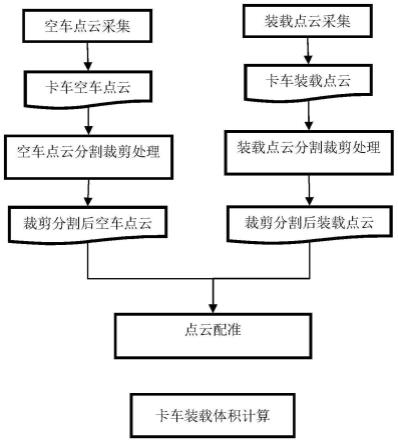
18.图1为系统处理流程图。
19.图2为装车前后实物图。
20.图3为tof相机的卡车空车初始采集图。
21.图4为cloudcompare分割和裁剪处理之后的卡车空车模型点云。
22.图5为tof相机的卡车装载初始采集图。
23.图6为cloudcompare分割和裁剪处理之后的卡车装载模型点云。
具体实施方式
24.下面进一步说明本发明的具体实施方式。
25.为了便于形象直观地说明问题,本实例以实验室模拟的卡车模型代替矿山实际卡车进行说明。其中卡车空车、装载图像如图2所示。
26.如图1所示,本发明的一种基于tof相机的露天矿卡车装载体积测量方法,包括在排卸点或开拓运输系统主干道卡车经过的上方安装tof相机模组,其tof相机的型号为smarttoftc-e2,并设置好相机参数,以减少或避免噪声与黑斑等现象的发生;其露天矿卡车装载体积测量方法包括下列步骤:
27.s1、通过tof相机模组分别采集卡车空车和卡车装载图片,并采用smarttofviewer
软件处理得到卡车空车的深度图、灰度图和点云图以及卡车装载的深度图、灰度图和点云图;分别如图3、图5所示。
28.s2、使用cloudcompare软件对卡车空车点云图与卡车装载点云图进行分割和裁剪等预处理,包括分割和裁剪两部分,分割操作用于过滤背景的杂点,裁剪剪去卡车外部无关的点云.操作完成后获得分割剪裁后的卡车空车点云与卡车装载点云,分别如图4、图6所示。
29.s3、将分割剪裁后的卡车空车点云与卡车装载点云采用cloudcompare临近点匹配法(icp)进行点云配准,使其长宽平面信息相对应;
30.所述的采用cloudcompare软件临近点匹配法(icp)进行点云配准是选中预处理之后卡车装载点云作为配准的移动方,而预处理之后的卡车空车点云作为不进行移动的参考系,通过单击“交换”按钮来交换选择。icp配准是一个迭代过程,在此过程中,两者误差在缓慢减少,并在最大迭代次数后停止过程,或者在两次迭代之间的误差(rms)差异低于给定阈值时立即停止过程,该阈值越小,收敛所需的时间越长,结果也越精细。一般而言选择1e-5
作为阈值,此时获得计算精度较高,运算时间也比较短。
31.s4、使用配准后的点云,采用立体几何算法计算矿岩装载体积。
32.所述的s4中的采用立体几何算法计算矿岩装载体积,是采用cloudcompare软件进行体积计算,选择配准后的卡车装载点云作为顶面,选择空车点云作为底面,以卡车车厢四周闭合区为四周边界,之后点击单元格步长数据栏设置步长和点选插值方法,点击更新按键之后,自动进行计算并生成计算结果,计算结果volume即为卡车矿岩装载体积量。
33.这种方法运行速度快,计算结果精度高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1