一种水线以下船体污染情况检测的图像分割方法与流程
1.本发明涉及数字图像处理技术领域,具体涉及一种水线以下船体污染情况检测的图像分割方法。
背景技术:
2.在海水全浸环境中,船舶和钢桩、平台、管线等移动和固定工程设施都不可避免遭受海洋污损生物附着影响,造成生物污损。船体附着的藤壶等污损生物,能使船舶航行阻力增加15%,燃油费上升40%~50%,因此海洋生物的附着使船舶的航速下降、船壳腐蚀速度加快,燃油成本消耗增加。相关人员提出使用涂料涂于船底从而在海水环境中隔绝船体,防污涂料是海洋涂料中的一个特殊品种,其主要目的是阻止海洋生物对海洋构筑物的附着、污损,保持船底或海洋结构的光滑、清洁。然而现今的海洋防污涂料有效性一般为1-5年,并且整个船体本身体积巨大,长期停靠码头边,船底附着的藤壶等污损生物生长情况并不一定会在规定返厂时间到了才完全污染,存在比定时返厂重新清洁时间提前就出现污染严重的现象,因此对该类不确定的情况需要进行及时的水下拍摄监测并反馈。而目前没有这类关于船舶壳体污染情况检测的方法或专利。
3.水下环境由于水体介质的影响,水下图像可以看作是直接衰减、前向散射、后向散射三者的线性叠加。直接衰减是指目标物体反射未发生散射的光,而目标物体反射发生小角度散射的光即为前向散射。非目标物体反射却仍被摄像机捕捉到的光称为后向散射。水下环境比大气环境复杂,因为无法考虑水体对光的选择性衰减特性和微粒的散射特性,因此导致水下图像退化严重,其中存在复杂的噪声,包括加性高斯噪声,具有乘性噪声性质的脉冲噪声,散斑噪声,总体上呈现功率谱密度不均匀的有色噪声。因此在对水线以下船体进行图像采集之后需要进行图像预处理以提高分割的精准度。
技术实现要素:
4.针对上述存在的现实问题,认真分析了该类问题所属的问题技术领域,提出一种水线以下船体污染情况检测的图像分割方法。
5.本发明的技术方案如下:
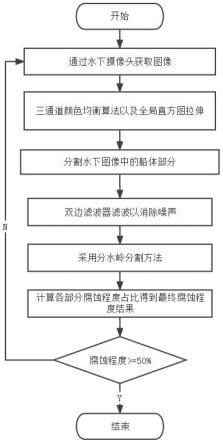
6.一种水线以下船体污染情况检测的图像分割方法,包括以下步骤:
7.步骤1、通过水下摄像头,获取自然光照下的水下退化图像;
8.步骤2、采用了颜色均衡算法以及全局直方图拉伸对图像进行对比度增强;
9.步骤3、采用阈值分割法对图像船体与水体部分进行分割;
10.步骤4、接着对图像进行双边滤波以消除噪声;
11.步骤5、通过分水岭算法对壳体被腐蚀或污染部分进行分割;
12.步骤6、将各个图片的污染部分与对于壳体像素占比进行计算,总和后为理论污染情况。
13.进一步的,所述步骤1中,预先判断水下摄像头放置的深度,将多个摄像头对准船
舶侧面停靠于码头的部位,设置频率为:固定每一周返回一次采集到的图像。
14.进一步的,所述步骤2中,对同时采集到的不同部位的图像分别进行处理,首先进行水下图像增强操作,首先进行图像的对比度校正,对rgb图像中的三个通道进行分解:
15.(ravg+gavg+bavg)/3=0.5(1)
16.式中,ravg、gavg、bavg分别为恢复后的红通道、绿通道、蓝通道归一化平均值;
[0017][0018][0019]
对g通道和b通道进行校正,这里不考虑r通道,因为水中的红光很难通过简单的颜色均衡来补偿,可能会导致红色过饱和度;利用式(2)、(3)计算颜色均衡系数θg、θb的g、b通道,其中m和n为图像的分辨率,基于系数θg、θb,g、b通道的强度值分别乘以θg、θb进行校正。
[0020]
进一步的,所述步骤3中,图像对比度校正之后,考虑到真正腐蚀的部分必须会存在于轮船壳体上,因此通过阈值分割法对图像的船体以及水体部分进行分割,通过对直方图进行分析,将以直方图双峰之间的谷底处灰度值作为阈值进行图像的阈值化处理,即可将目标和背景分割开来;rgb图像的灰度级范围在0到255之间,因此正常光照下由水中拍摄到的船体颜色灰度值设置为150,高于150的则判定为船体部分。
[0021]
进一步的,所述步骤4中,对于初步进行增强后的算法进行双边滤波器滤波,消除图片中的噪声,由此减少由于光散射和吸收导致的消极影响;双边滤波的思想是在高斯滤波的基础上加入像素值权重项,既要考虑距离因素,又要考虑像素值差异的影响,像素值越相近,权重越大;将像素值权重表示为gr,空间距离权重表示为gs:
[0022][0023][0024]
滤波结果bf为:
[0025][0026]
wq为滤波窗口内每个像素值的权重和,用于权重的归一化:
[0027]
wq=∑
p∈sgs
(p)gr(p)(7)
[0028]
进一步的,所述步骤5中,对水下图像增强之后,采用分水岭分割方法,对壳体上已经被污染以及腐蚀的部分进行形态学分割,其具体算法步骤为:
[0029]
分水岭算法首先需要得到图像的边缘信息,把原始图像的梯度图像作为输入图像,接下去找到图像中灰度值最小的像素点,让阈值从最小值开始增长,该像素点为起始点;水平面在增长的过程中,会碰到周围的邻域像素;测量这些像素点到起始点的测距,如果小于设定阈值,则将这些像素淹没,否则在这些像素点上进行分割,建立边界,这样就对这些邻域像素进行了分类;随着水平面越来越高,会设置更多更高的分水岭边界,直到灰度值的最大值,所有区域都在分水岭线上相遇,这些边界就对整个图像像素的进行了分区,被区分出来的部分即为检测到的污染部分。
[0030]
进一步的,所述步骤6中,将各个图片的污染部分通过封闭区域面积计算出总占比
面积,从而得到船舶整体的被污染情况,设置阈值为50%进行对返厂检修负责人员进行反馈,如果没有达到阈值要求,则在下一个时间段重新进行图像的获取,重复步骤1进行检测。
[0031]
本发明的有益效果如下:
[0032]
本发明提出了通过增加水下图像增强算法对图像饱和度对比度等进行提升,消除多余噪声,以提高后续分割算法的精确度,提升最终腐蚀部位计算占比值。
附图说明
[0033]
图1是本发明图像获取示意图;
[0034]
图2是本发明的实施流程图。
具体实施方式
[0035]
下面对本发明的实施方式进行更为详细的描述,所述实施方式的流程图在附图1中展示。下面通过参考附图描述的实施方案仅用于解释本发明,而不能解释为对本发明的限制。
[0036]
如图1所示,一种水线以下船体污染情况检测的图像分割方法,包括以下步骤:
[0037]
步骤1、预先判断水下摄像头放置的深度为水下五米,将多个摄像头对准船舶侧面停靠于码头的部位,设置频率为:固定每一周返回一次采集到的图像。
[0038]
步骤2、对同时采集到的不同部位的图像分别进行处理,通过三通道颜色均衡算法以及全局直方图拉伸对图像进行对比度增强。
[0039]
(ravg+gavg+bavg)/3=0.5(1)
[0040]
式中,ravg、gavg、bavg分别为恢复后的红通道、绿通道、蓝通道归一化平均值。
[0041][0042][0043]
对g通道和b通道进行校正。这里不考虑r通道,因为水中的红光很难通过简单的颜色均衡来补偿,可能会导致红色过饱和度。利用式(2)、(3)计算颜色均衡系数θg、θb的g、b通道,其中m和n为图像的分辨率。基于系数θg、θb,g、b通道的强度值可以分别乘以θg、θb进行校正。
[0044]
步骤3、图像对比度校正之后,考虑到真正腐蚀的部分必须会存在于轮船壳体上,因此通过阈值分割法对图像的船体以及水体部分进行分割,通过对直方图进行分析,将以直方图双峰之间的谷底处灰度值作为阈值进行图像的阈值化处理,即可将目标和背景分割开来。rgb图像的灰度级范围在0到255之间,因此正常光照下由水中拍摄到的船体颜色灰度值设置为150,高于150的则判定为船体部分。
[0045]
步骤4、对于初步进行增强后的算法进行双边滤波器滤波,消除图片中的噪声,由此减少由于光散射和吸收导致的消极影响。双边滤波的思想是在高斯滤波的基础上加入像素值权重项,既要考虑距离因素,又要考虑像素值差异的影响,像素值越相近,权重越大。将像素值权重表示为gr,空间距离权重表示为gs:
[0046]
[0047][0048]
滤波结果bf为:
[0049][0050]
wq为滤波窗口内每个像素值的权重和,用于权重的归一化:
[0051]
wq=∑
p∈sgs
(p)gr(p)(7)
[0052]
步骤5、对水下图像增强之后,采用分水岭分割方法,对壳体上已经被污染以及腐蚀的部分进行形态学分割。其具体算法步骤为:
[0053]
分水岭算法首先需要得到图像的边缘信息,把原始图像的梯度图像作为输入图像,即:
[0054]
g(x,y)=grad(f(x,y))={[f(x,y)-f(x-1,y)]2[f(x,y)-f(x,y-1)]2}0.5(8)
[0055]
式中,f(x,y)表示原始图像,grad{.}表示梯度运算。
[0056]
接下去找到图像中灰度值最小的像素点,让阈值从最小值开始增长,该像素点为起始点;水平面在增长的过程中,会碰到周围的邻域像素;测量这些像素点到起始点的测距,如果小于设定阈值,则将这些像素淹没,否则在这些像素点上进行分割,建立边界,这样就对这些邻域像素进行了分类;随着水平面越来越高,会设置更多更高的分水岭边界,直到灰度值的最大值,所有区域都在分水岭线上相遇,这些边界就对整个图像像素的进行了分区,被区分出来的部分即为检测到的污染部分。
[0057]
步骤6、将各个图片的污染部分通过封闭区域面积计算出总占比面积,从而得到理论中的船舶整体的被污染情况,设置阈值为50%进行对返厂检修负责人员进行反馈,如果没有达到阈值要求,则在下一个时间段重新进行图像的获取,重复步骤1进行检测。
[0058]
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1