一种VR设备及功能模式切换控制方法与流程
一种vr设备及功能模式切换控制方法
技术领域
1.本发明涉及虚拟现实技术领域,特别涉及一种vr设备。本发明还涉及一种功能模式切换控制方法。
背景技术:
2.随着vr(virtual reality,虚拟现实)技术的发展,越来越多的vr设备已得到广泛使用。
3.vr技术是一种可以创建和体验虚拟世界的计算机仿真系统,它利用计算机生成一种模拟环境,使用户沉浸到该环境中。vr技术利用现实生活中的数据,通过计算机技术产生的电子信号,将其与各种输出设备结合使其转化为能够让人们感受到的现象,这些现象可以是现实中的物体,也可以是肉眼所看不到的物体,并通过三维模型进行表现。
4.目前,vr设备通常包括一个头戴式眼镜和一个或两个操作手柄,头戴式眼镜内集成控制器,通过头戴式眼镜为用户展现虚拟场景,并通过操作手柄上的按键、旋钮等帮助用户实现各种操作。以vr飞行类游戏设备为例,用户在虚拟场景玩游戏时所涉及的各类操作,比如飞机的起飞、加速、减速、降落、飞行、射击等,必须通过操作手柄上的各类按键进行操作,然而这明显与现实世界中的飞机各类操作设备(如油门杆、操纵杆等)的操作方式大相径庭,导致用户在操作过程中非常缺乏沉浸感,拟真程度不高,用户使用体验不佳。
5.因此,如何改善用户的操作沉浸感,提高操作拟真程度,优化用户使用体验,是本领域技术人员面临的技术问题。
技术实现要素:
6.本发明的目的是提供一种vr设备,能够改善用户的操作沉浸感,提高操作拟真程度,优化用户使用体验。本发明的另一目的是提供一种功能模式切换控制方法。
7.为解决上述技术问题,本发明提供一种vr设备,包括操作手柄、用于模拟操作设备的功能模组,所述操作手柄与所述功能模组可拆卸连接,且所述操作手柄与所述功能模组连接到位时,所述操作手柄由独立功能模式切换至与所述功能模组匹配的特定功能模式。
8.优选地,所述操作手柄上设置有第一连接件,所述功能模组上设置有第二连接件,所述第一连接件与所述第二连接件可拆卸连接。
9.优选地,所述第一连接件包括凸设于所述操作手柄的连接面板上的卡接板,所述第二连接件包括开设于所述功能模组的扩展面板上的卡接槽,所述卡接板与所述卡接槽形成卡接配合。
10.优选地,所述卡接板为弧形板,所述卡接槽为弧形槽,所述卡接板与所述卡接槽形成沿周向的旋转插装连接。
11.优选地,所述第一连接件还包括开设于所述操作手柄的连接面板上的安装凹槽,所述第二连接件还包括凸设于所述功能模组的扩展面板上的安装凸柱,所述安装凹槽与所述安装凸柱形成轴孔定位配合。
12.优选地,所述第二连接件还包括环套在所述安装凸柱上的弹性件,所述弹性件的一端用于与所述操作手柄的连接面板抵接。
13.优选地,还包括设置于所述操作手柄上的信号触发器、设置于所述功能模组上的触发元件,所述操作手柄与所述功能模组连接到位时,所述触发元件激活所述信号触发器对所述控制器发送功能模式切换启动指令。
14.优选地,还包括设置于所述操作手柄上、用于检测其实时姿态变化的姿态传感器,所述姿态传感器与所述控制器信号连接。
15.优选地,所述功能模组包括模拟油门座、可翻转地设置于所述模拟油门座上的模拟油门杆,以及设置于所述模拟油门座内、用于对所述模拟油门杆的运动形成力感反馈的油门电位器,所述模拟油门杆用于与所述操作手柄相连。
16.优选地,所述功能模组包括模拟操纵座、球接于所述模拟操纵座表面的模拟操纵杆,以及设置于所述模拟操纵座内、用于对所述模拟操纵杆的运动形成力感反馈的摇杆电位器,所述模拟操纵杆用于与所述操作手柄相连。
17.本发明还提供一种功能模式切换控制方法,应用于上述任一项所述的vr设备,包括:
18.接收功能模式激活指令;
19.判断操作手柄与功能模组是否连接到位,若否,则使所述操作手柄工作于独立功能模式;若是,则使所述操作手柄工作于与所述功能模组匹配的特定功能模式。
20.优选地,判断操作手柄与功能模组是否连接到位,包括:
21.检测所述操作手柄上的信号触发器是否被所述功能模组上的触发元件所激活,若是,则所述操作手柄与所述功能模组连接到位;若否,则所述操作手柄与所述功能模组未连接到位。
22.优选地,判断操作手柄与功能模组是否连接到位,具体包括:检测所述操作手柄上的霍尔传感器是否感应到所述功能模组上的磁性元件,若是,则所述操作手柄与所述功能模组连接到位;若否,则所述操作手柄与所述功能模组未连接到位。
23.优选地,在判断结果为是时,还包括:
24.检测所述操作手柄的姿态变化,并根据所述操作手柄的姿态变化触发所述功能模组执行对应指令。
25.优选地,在判断结果为是时,还包括:
26.检测所述操作手柄的按键触发状态,并在所述按键被触发时使所述功能模组执行对应指令。
27.本发明所提供的vr设备,主要包括操作手柄和功能模组。其中,操作手柄主要用于供用户进行抓握、按键等相关操作,且操作手柄与vr设备的控制器保持信号连接。功能模组是vr设备的一种具备特定功能的配件,主要用于模拟现实世界中的特定操作设备,并且与操作手柄形成可拆卸连接,使得操作手柄可以从功能模组上拆卸后单独使用,也可以安装在功能模组上作为功能模组的一部分而进行联合使用。重要的是,当操作手柄与功能模组连接到位时,即操作手柄与功能模组装配为一体时,控制器将操作手柄的独立功能模式切换至与该功能模组相匹配的特定功能模式,从而使用户能够通过操作手柄对功能模组进行对应的功能操作。如此,由于功能模组能够模拟现实世界中的操作设备,且当操作手柄与功
能模组装配为一体时,控制器即刻切换操作手柄的功能模式,使得用户对操作手柄的操作模式不再是之前的按压按键等独立功能模式,而是转变为与当前功能模组匹配的对应操作模式,从而使用户感觉仿佛在操作现实世界中的操作设备,因此能够改善用户的操作沉浸感,提高操作拟真程度,优化用户使用体验。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
29.图1为本发明所提供的一种具体实施方式的整体结构示意图。
30.图2为本发明所提供的另一种具体实施方式的整体结构示意图。
31.图3为操作手柄的一种具体结构示意图。
32.图4为第一连接件的一种具体结构示意图。
33.图5为第二连接件的一种具体结构示意图。
34.图6为图1的剖视图。
35.图7为图2的剖视图。
36.图8为吸附部件的一种具体结构示意图。
37.图9为本发明所提供的一种具体实施方式的方法流程图。
38.其中,图1—图8中:
39.操作手柄—1,功能模组—2,第一连接件—3,第二连接件—4,信号触发器—5,触发元件—6,姿态传感器—7,吸附部件—8;
40.连接面板—11,扩展面板—21,卡接板—31,安装凹槽—32,卡接槽—41,安装凸柱—42,弹性件—43;
41.模拟油门座—2a,模拟油门杆—2b,油门电位器—2c;
42.模拟操纵座—2d,模拟操纵杆—2e,摇杆电位器—2f。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.在本发明所提供的一种具体实施方式中,vr设备主要包括操作手柄1和功能模组2。
45.其中,操作手柄1主要用于供用户进行抓握、按键等相关操作,且操作手柄1与vr设备的控制器保持信号连接。
46.功能模组2是vr设备的一种具备特定功能的配件,主要用于模拟现实世界中的特定操作设备,并且与操作手柄1形成可拆卸连接,使得操作手柄1可以从功能模组2上拆卸后单独使用,也可以安装在功能模组2上作为功能模组2的一部分而进行联合使用。
47.重要的是,当操作手柄1与功能模组2连接到位时,即操作手柄1与功能模组2装配为一体时,控制器将操作手柄1的独立功能模式切换至与该功能模组2相匹配的特定功能模式,从而使用户能够通过操作手柄1对功能模组2进行对应的功能操作。
48.如此,由于功能模组2能够模拟现实世界中的操作设备,且当操作手柄1与功能模组2装配为一体时,控制器即刻切换操作手柄1的功能模式,使得用户对操作手柄1的操作模式不再是之前的按压按键等独立功能模式,而是转变为与当前功能模组2匹配的对应操作模式,从而使用户感觉仿佛在操作现实世界中的操作设备,因此能够改善用户的操作沉浸感,提高操作拟真程度,优化用户使用体验。
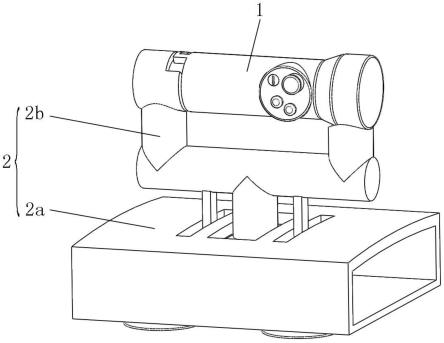
49.请参考图1、图6,图1为本发明所提供的一种具体实施方式的整体结构示意图,图6为图1的剖视图。
50.在关于功能模组2的一种可选实施例中,该功能模组2主要用于模拟现实世界中的飞机油门,主要包括模拟油门座2a、模拟油门杆2b和油门电位器2c。其中,模拟油门座2a为基础部件,通常呈矩形壳体状,主要用于安装其余零部件。模拟油门杆2b设置在模拟油门座2a上,并与其形成转动连接,可在模拟油门座2a上进行翻转运动,从而模拟现实世界中对于飞机油门杆的推拉操作。同时,模拟油门杆2b能够与操作手柄1相连,从而将操作手柄1与模拟油门杆2b装配为一体,用户再对操作手柄1进行操作时,即可模仿现实世界中对于飞机油门杆的推拉操作而对模拟油门杆2b进行推拉翻转。油门电位器2c设置于模拟油门座2a内,并与模拟油门杆2b相连,主要用于对模拟油门杆2b的翻转运动施加一定阻尼,从而对用户形成力感反馈,模拟现实世界中对于飞机油门杆进行推拉操作的手感,进一步提高拟真程度和沉浸感。
51.相应的,当操作手柄1与模拟油门杆2b装配为一体时,控制器即将操作手柄1的独立功能模式切换为与模拟油门杆2b匹配的油门功能模式,此时控制器能够顺利检测到用户对操作手柄1进行的推油门杆、拉油门杆等操作,并实时反馈到虚拟场景中。
52.一般的,模拟油门杆2b的形状与现实世界中的飞机油门杆的形状相同,均呈矩形边框结构,但为了便于与操作手柄1装配为一体,通常可将模拟油门杆2b的其中一根边框去除,使得操作手柄1能够代替去除的边框。如此设置,操作手柄1只需与相邻的其余边框相连即可。
53.请参考图2、图7,图2为本发明所提供的另一种具体实施方式的整体结构示意图,图7为图2的剖视图。
54.在关于功能模组2的另一种可选实施例中,该功能模组2主要用于模拟现实世界中的飞机操纵座(或姿态控制器),主要包括模拟操纵座2d、模拟操纵杆2e和摇杆电位器2f。其中,模拟操纵座2d为基础部件,通常呈矩形壳体状,主要用于安装其余零部件。模拟操纵杆2e设置在模拟操纵座2d上,并与其形成球接,可在模拟操纵座2d的表面进行球面运动,从而模拟现实世界中对于飞机操纵杆的三维姿态控制操作。同时,模拟操纵杆2e能够与操作手柄1相连,从而将操作手柄1与模拟操纵杆2e装配为一体,用户再对操作手柄1进行操作时,即可模仿现实世界中对于飞机操纵杆的三维姿态控制操作而对模拟操纵杆2e进行球面运动操作。摇杆电位器2f设置于模拟操纵座2d内,并与模拟操纵杆2e相连,主要用于对模拟操纵杆2e的球面运动施加一定阻尼,从而对用户形成力感反馈,模拟现实世界中对于飞机操纵杆进行三维姿态控制操作的手感,进一步提高拟真程度和沉浸感。
55.相应的,当操作手柄1与模拟操纵杆2e装配为一体时,控制器即将操作手柄1的独立功能模式切换为与模拟操纵杆2e匹配的操纵功能模式,此时控制器能够顺利检测到用户对操作手柄1进行的三维姿态控制等操作,并实时反馈到虚拟场景中。
56.一般的,模拟操纵杆2e的形状与现实世界中的飞机操纵杆的形状相同,均呈柱状结构,但为了便于与操作手柄1装配为一体,通常可将模拟操纵杆2e的上半部分去除,使得操作手柄1能够代替去除的部分。如此设置,操作手柄1只需与模拟操纵杆2e的下半部分相连即可。
57.如图3、图4、图5所示,图3为操作手柄1的一种具体结构示意图,图4为第一连接件3的一种具体结构示意图,图5为第二连接件4的一种具体结构示意图。
58.为便于实现操作手柄1与前述各类功能模组2之间的连接和装配,本实施例中增设了第一连接件3和第二连接件4。其中,第一连接件3设置在操作手柄1上,而第二连接件4设置在功能模组2上,且第一连接件3可与第二连接件4形成可拆卸连接。如此设置,通过第一连接件3与第二连接件4之间的互相连接,即可实现操作手柄1与功能模组2之间的连接和装配,从而对于任何类型的功能模组2而言,均可以方便地实现操作手柄1的拆装操作。
59.在关于第一连接件3与第二连接件4的一种可选实施例中,该第一连接件3主要包括卡接板31,而第二连接件4主要包括卡接槽41。其中,卡接板31设置在操作手柄1的连接面板11上,而该连接面板11通常位于操作手柄1的一端端面上,且卡接板31凸出连接面板11。卡接槽41开设在功能模块的扩展面板21上,而该扩展面板21通常位于功能模组2的特定部位的端面上,且卡接槽41内陷于扩展面板21。同时,卡接板31能够与卡接槽41形成卡接配合,从而在两者连接时实现互相卡紧,并能够顺利互相脱离,进而方便地进行操作手柄1在功能模组2上的拆装操作。
60.一般的,卡接板31呈弧形,且沿着连接面板11的周向延伸,相应的,卡接槽41也呈弧形,并沿着扩展面板21的轴向延伸,且卡接板31与卡接槽41的形状相同,在连接面板11与扩展面板21互相压紧后,卡接板31能够伸入到卡接槽41的槽口中,并通过两者间的相对旋转运动,将卡接板31旋入到卡接槽41中实现卡接锁固。
61.当然,第一连接件3与第二连接件4之间的连接方式,并不仅限于上述卡接板31与卡接槽41的配合,其余比如卡扣与扣槽的配合、螺纹连接配合等也同样可以采用。
62.此外,考虑到在将操作手柄1与功能模组2相连时,通常需要将操作手柄1的连接面板11与功能模组2的扩展面板21互相对准、互相压紧,针对此,本实施例中增设了安装凹槽32和安装凸柱42。其中,安装凹槽32开设在操作手柄1的连接面板11上,一般位于该连接面板11的中心区域。安装凸柱42凸设在功能模组2的扩展面板21上,一般也位于该扩展面板21的中心区域。并且,安装凹槽32的形状与安装凸柱42的形状互相匹配,两者可顺利形成轴孔配合。如此设置,在将操作手柄1与功能模组2相连时,只需找准功能模组2的扩展面板21上的安装凸柱42,将操作手柄1的连接面板11上的安装凹槽32插入即可,能够快速、准确地实现操作手柄1在功能模组2上的定位连接。
63.不仅如此,为增强操作手柄1与功能模组2之间的连接稳定性,本实施例中还增设了弹性件43,比如弹簧、弹性柱等。具体的,该弹性件43环套在安装凸柱42上,其底端与功能模组2的扩展面板21相连或者嵌设在扩展面板21内,其顶端沿安装凸柱42的轴向朝上延伸,主要用于与操作手柄1的连接面板11形成抵接,从而在操作手柄1的连接面板11与功能模组
2的扩展面板21互相压紧的过程中逐渐被压缩,并利用弹性力对前述卡接板31、卡接槽41之间的卡接配合形成预紧力,进而提高两者间的卡接稳定性。同时,当卡接板31与卡接槽41之间的卡接连接解锁后,利用弹性件43的弹力还能够将操作手柄1自动弹出,方便用户拿取。
64.为便于控制器监测操作手柄1与功能模组2之间的连接状态,本实施例中增设了信号触发器5和触发元件6。其中,信号触发器5设置在操作手柄1上,一般可设置在操作手柄1的连接面板11上,比如容纳在前述安装凹槽32内,也可以设置在操作手柄1的外缘面等位置处。触发元件6设置在功能模组2上,一般可设置在功能模组2的扩展面板21上,比如安装在前述安装凸柱42的顶端,也可以设置在功能模组2的其余位置处。当操作手柄1与功能模组2连接到位时,信号触发器5与触发元件6的间距减小到超过触发阈值,使得触发元件6激活信号触发器5对控制器发送功能模式切换启动指令,从而使控制器获知当前操作手柄1与功能模组2已连接到位,并根据功能模组2的类型将操作手柄1的独立功能模式切换为对应的功能模式。
65.一般的,信号触发器5具体可采用霍尔传感器,而触发元件6具体可采用磁铁等磁性元件。当然,信号触发器5还可采用距离传感器、压力传感器等,相应的,触发元件6也采用对应的匹配部件。
66.另外,用户在对操作手柄1进行与功能模组2对应的操作时,通常涉及到对操作手柄1的姿态控制,为使控制器精确检测操作手柄1的姿态变化,本实施例中增设了姿态传感器7。具体的,该姿态传感器7设置在操作手柄1上,并与控制器保持信号连接,主要用于检测操作手柄1的实时姿态变化。一般的,姿态传感器7可采用红外led,并且具体可设置在操作手柄1的连接面板11上、另一端面上等位置。
67.如图8所示,图8为吸附部件8的一种具体结构示意图。
68.为便于实现功能模组2在使用场景中的固定安装,方便用户熟悉操作手柄1的连接位置,本实施例中,在功能模组2上设置了吸附部件8。具体的,该吸附部件8可采用吸盘等,以便吸附固定在地面、墙面等安装面上。
69.如图9所示,图9为本发明所提供的一种具体实施方式的方法流程图。
70.本实施例还提供一种功能模式切换控制方法,主要包括:
71.s1、接收功能模式激活指令;
72.s2、判断操作手柄1与功能模组2是否连接到位,若否,则使操作手柄1工作于独立功能模式;若是,则使操作手柄1工作于与功能模组2匹配的特定功能模式。
73.其中,当操作手柄1上电时,操作手柄1即可接收到由控制器发送的功能模式激活指令。而当操作手柄1接收到功能模式激活指令后,可以直接工作于默认功能模式(因默认操作手柄1的初始状态是独立状态),即不与功能模组2相关的独立功能模式,此时操作手柄1可以独立使用;也可以先不进入独立功能模式,而是先判断操作手柄1与功能模组2是否连接到位,若否,则说明操作手柄1确实处于独立状态,此时再进入独立功能模式;若是,则说明操作手柄1与功能模组2处于连接为一体状态,此时则直接进入到与该当前功能模组2匹配的特定功能模式,或者由之前的独立功能模式切换为特定功能模式。
74.比如,当检测到操作手柄1与模拟油门杆2b连接到位时,操作手柄1由独立功能模式——“手柄模式”切换到与模拟飞机油门匹配的特定功能模式——“飞行模式”。
75.在判断操作手柄1与功能模组2是否连接到位时,可以通过检测操作手柄1上的信
号触发器5是否被功能模组2上的触发元件6所激活的方式予以实现。若操作手柄1与功能模组2连接到位,则信号触发器5会被触发元件6所激活;若操作手柄1与功能模组2未连接到位,则信号触发器5不会被触发元件6所激活。
76.具体的,信号触发器5可以采用霍尔传感器,而信号触发器5可以采用磁性元件。如此设置,只需检测操作手柄1上的霍尔传感器是否感应到功能模组2上的磁性元件即可方便地判断操作手柄1与功能模组2是否连接到位,若感应到,则说明连接到位;若未感应到,则说明尚未连接到位。
77.此外,在操作手柄1与功能模组2连接到位后,且操作手柄1工作于特定功能模式时,还可以继续检测操作手柄1的姿态变化,以根据操作手柄1的姿态变化触发功能模组2执行对应指令。当操作手柄1与模拟油门杆2b连接到位时,根据操作手柄1的姿态变化,可以触发功能模组2执行“油门增减控制”的指令;当操作手柄1与模拟操纵杆2e连接到位时,根据操作手柄1的姿态变化,可以触发功能模组2执行“飞行姿态控制”的指令。
78.不仅如此,在操作手柄1与功能模组2连接到位后,且操作手柄1工作于特定功能模式时,还可以继续检测操作手柄1的按键触发状态,以在特定按键被按压触发时,使功能模组2执行对应指令。比如,当操作手柄1与模拟操纵杆2e连接到位时,根据操作手柄1上的不同的按键被触发,可以使功能模组2执行“导弹发射”、“航炮射击”等指令。
79.本实施例所提供的功能模式切换控制方法,其有益效果参考前述vr设备,此处不再赘述。
80.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1