污染物的远程在线智能分析方法与流程
本发明涉及污染物智能分析的,特别涉及污染物的远程在线智能分析方法。
背景技术:
1、炼钢厂和垃圾焚烧厂在运行时会产生大量污染废气,这些污染废气通常会通过烟囱直接排放到大气环境中,污染废气在大气环境中不断扩散,会对扩散所波及的区域产生大气环境污染。现有的大气污染物检测手段都是在烟囱内部安装污染物颗粒传感器,直接检测到烟囱排放的污染物成分及其浓度。但是上述手段无法对已经排放到大气环境的污染物进行实时持续化的跟踪,无法全面地对污染物在大气环境中的扩散覆盖情况进行识别分析,从而降低污染物远程分析的准确性和可靠性,以及无法对污染物在大气环境的扩散覆盖范围进行及时的预警。
技术实现思路
1、针对现有技术存在的缺陷,本发明提供一种污染物的远程在线智能分析方法,其先利用主无人机拍摄得到污染物排放源排放的污染物影像,并通过地面基站分析污染物影像,得到污染物在三维空间的分布状态信息;再以该分布状态信息为基准,控制子无人机群的所有子无人机对污染物进行分布式检测,同时利用子无人机采集自身所处位置的空气流动状态信息,以此估计污染物的扩散趋势,再根据该扩散趋势,反馈调整子无人机的飞行状态;通过地面基站实时接收与分析所有子无人机在整个飞行过程中采集得到的污染物状态数据,以此得到污染物在未来预设时间段内的变化状态信息,其利用子无人机群对已经排放到大气环境中的污染物进行同步跟踪检测,能够获得关于污染物在大气环境的扩散分布数据,从而提高污染物远程分析的准确性和可靠性,以及保证对污染物在大气环境的扩散覆盖范围进行及时的预警。
2、本发明提供一种污染物的远程在线智能分析方法,其包括如下步骤:
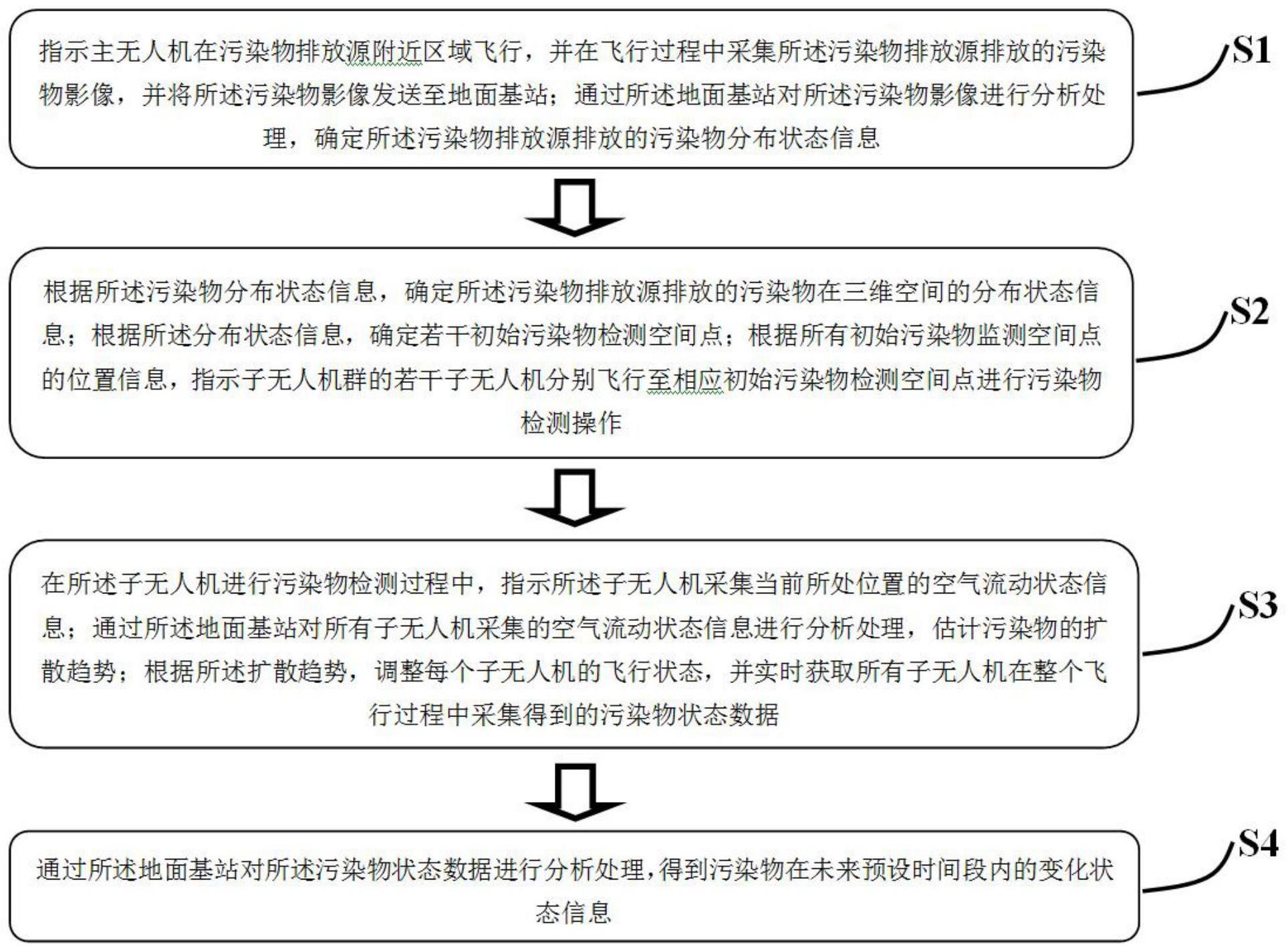
3、步骤s1,指示主无人机在污染物排放源附近区域飞行,并在飞行过程中采集所述污染物排放源排放的污染物影像,并将所述污染物影像发送至地面基站;通过所述地面基站对所述污染物影像进行分析处理,确定所述污染物排放源排放的污染物分布状态信息;
4、步骤s2,根据所述污染物分布状态信息,确定所述污染物排放源排放的污染物在三维空间的分布状态信息;根据所述分布状态信息,确定若干初始污染物检测空间点;根据所有初始污染物检测空间点的位置信息,指示子无人机群的若干子无人机分别飞行至相应初始污染物检测空间点进行污染物检测操作;
5、步骤s3,在所述子无人机进行污染物检测过程中,指示所述子无人机采集当前所处位置的空气流动状态信息;通过所述地面基站对所有子无人机采集的空气流动状态信息进行分析处理,估计污染物的扩散趋势;根据所述扩散趋势,调整每个子无人机的飞行状态,并实时获取所有子无人机在整个飞行过程中采集得到的污染物状态数据;
6、步骤s4,通过所述地面基站对所述污染物状态数据进行分析处理,得到污染物在未来预设时间段内的变化状态信息。
7、进一步,在所述步骤s1中,指示主无人机在污染物排放源附近区域飞行,并在飞行过程中采集所述污染物排放源排放的污染物影像,并将所述污染物影像发送至地面基站具体包括:
8、指示主无人机先在距离污染物排放源的排放口预设距离范围的区域进行盘旋飞行,并在盘旋飞行过程中对所述排放口附近区域进行扫描拍摄,得到相应的污染物全景影像;再将所述污染物全景影像实时发送至地面基站。
9、进一步,在所述步骤s1中,通过所述地面基站对所述污染物影像进行分析处理,确定所述污染物排放源排放的污染物分布状态信息具体包括:
10、通过所述地面基站对所述污染物全景影像进行像素灰度化处理和边缘像素锐化处理后,从所述污染物全景影像中识别得到污染物的边界轮廓信息;
11、再根据所述边界轮廓信息,确定所述排放口附近区域的污染物在三维空间的边界面存在信息,以此作为所述污染物分布状态信息。
12、进一步,在所述步骤s2中,根据所述污染物分布状态信息,确定所述污染物排放源排放的污染物在三维空间的分布状态信息;根据所述分布状态信息,确定若干初始污染物检测空间点具体包括:
13、根据所述排放口附近区域的污染物在三维空间的边界面存在信息,确定所述排放口附近区域的污染物在三维空间的边界面存在位置和边界面面积;
14、再根据所述排放口附近区域的污染物在三维空间的边界面存在位置和边界面面积,从每个边界面上选择均匀分布的若干空间点作为所述初始污染物检测空间点。
15、进一步,在所述步骤s2中,根据所有初始污染物检测空间点的位置信息,指示子无人机群的若干子无人机分别飞行至相应初始污染物检测空间点进行污染物检测操作具体包括:
16、以所述排放口的中央位置点为参照基准,确定每个初始污染物监控空间点与所述中央位置点的相对位置关系;其中,所述相对位置关系包括相对距离和相对方位角;
17、根据所述相对位置关系,生成相应的飞行控制指令,并将所述飞行控制指令发送至子无人机群的每个子无人机,以此每个子无人机根据接收到的飞行控制指令飞行至初始污染物检测空间点;
18、还通过所述地面基站指示所述子无人机在相应的初始污染物检测空间点中停留预定时间长度,并在停留期间进行污染物检测操作。
19、进一步,在所述步骤s2中,根据所述相对位置关系,生成相应的飞行控制指令,并将所述飞行控制指令发送至子无人机群的每个子无人机,以此每个子无人机根据接收到的飞行控制指令飞行至初始污染物检测空间点具体包括:
20、步骤s201,利用下面公式(1),根据所述子无人机群的个数和所有初始污染物监控空间点的个数以及所述相对位置关系,得到每个初始污染物监控空间点分配的子无人机的个数,
21、
22、在上述公式(1)中,d(a)表示第a个初始污染物监控空间点控制分配的子无人机的个数;m表示所述子无人机群的个数;n表示所有初始污染物监控空间点的个数;l(a)表示第a个初始污染物监控空间点与所述中央位置点的相对距离值;表示向下取整;
23、若d(a)=0,则表示当前无人机群中的无人机个数过少,需要再额外补充多个无人机后再重复上述步骤s201的操作;
24、若d(a)≠0,则按照如下过程进行控制操作:每个无人机会根据接入控制的顺序形成一组编号,第一个接入的无人机编号为1,第二个接入的无人机编号为2,以此类推,并按照无人机编号的顺序以及每个初始污染物监控空间点的编号顺序分配每个无人机,第一个初始污染物监控空间点会根据d(1)的数值按照无人机编号的顺序分配d(1)个无人机,依次类推直至所有初始污染物监控空间点的无人机个数均被分配完毕,若存在剩余的无人机,则指示剩余的无人机开启后备模式,环形围绕着所述中央位置点进行飞行,若存在其它无人机故障,则自动进行额外补充;
25、步骤s202,利用下面公式(2),根据每个初始污染物监控空间点分配的子无人机的个数,控制每个子无人机在每个初始污染物监控空间点的预定时间长度,
26、
27、在上述公式(2)中,t(a)表示第a个初始污染物监控空间点周围无人机的预定时间长度;t0表示检测所述初始污染物监控空间点的最短检测时间;表示将a的值从1取值到n代入到括号内得到括号内的最大值;
28、步骤s203,利用下面公式(3),根据无人机分配到的初始污染物监控空间点以及无人机在对应初始污染物监控空间点的预定时间长度,生成每个无人机的飞行控制指令,
29、
30、在上述公式(3)中,g(i)表示第i个无人机的飞行控制指令;a(i)表示上述步骤s201中第i个无人机被分配到第a(i)个初始污染物监控空间点进行检测,若第i个无人机被分配到初始污染物监控空间点周围则若第i个无人机未被分配到初始污染物监控空间点周围则l[a(i)]表示第a(i)个初始污染物监控空间点与所述中央位置点的相对距离值;θ[a(i)]表示第a(i)个初始污染物监控空间点与所述中央位置点的相对方位角;t[a(i)]表示第a(i)个初始污染物监控空间点周围无人机的预定时间长度;y0表示飞行控制指令的帧头;e0表示飞行控制指令的帧尾;{,,,,}表示将括号内逗号隔开的数据组成控制指令,当无人机在接收到所述控制指令后会验证帧头帧尾,验证成功后会根据所述相对距离值和相对方位角飞行到对应初始污染物监控空间点上进行检测t[a(i)]时长,若接收到的控制指令为{y0,0,0,0,e0},则开启后备模式,环形围绕着所述中央位置点进行飞行,若存在其它无人机故障,则自动进行额外补充。
31、进一步,在所述步骤s3中,在所述子无人机进行污染物检测过程中,指示所述子无人机采集当前所处位置的空气流动状态信息;通过所述地面基站对所有子无人机采集的空气流动状态信息进行分析处理,估计污染物的扩散趋势具体包括:
32、在所述子无人机进行污染物检测过程中,指示所述子无人机采集当前所处位置的风速信息和风向信息,并将所述风速信息和所述风向信息实时发送至所述地面基站;
33、通过所述地面基站对所有子无人机采集得到的风速信息和风向信息进行分析处理,确定所述子无人机群当前所处区域的风场矢量分布状态信息;
34、再根据所述风场矢量分布状态信息,估计所述排放口附近区域的污染物的扩散速度和扩散方向。
35、进一步,在所述步骤s3中,根据所述扩散趋势,调整每个子无人机的飞行状态,并实时获取所有子无人机在整个飞行过程中采集得到的污染物状态数据具体包括:
36、根据所述排放口附近区域的污染物的扩散速度和扩散方向,通过所述地面基站向每个子无人机分别发送相应的飞行状态调整指令,以此调整每个子无人机的飞行速度和飞行航向,以此每个子无人机能够始终跟随污染物的扩散运动进行同步飞行;
37、指示所有子无人机在整个飞行过程中采集得到的污染物浓度数据和污染物扩散速度数据同步发送至所述地面基站。
38、进一步,在所述步骤s4中,通过所述地面基站对所述污染物状态数据进行分析处理,得到污染物在未来预设时间段内的变化状态信息具体包括:
39、通过所述地面基站对所述污染物浓度数据和污染物扩散速度数据进行分析处理,估计得到污染物在未来预设时间段的浓度变化信息和扩散范围变化信息。
40、相比于现有技术,该污染物的远程在线智能分析方法先利用主无人机拍摄得到污染物排放源排放的污染物影像,并通过地面基站分析污染物影像,得到污染物在三维空间的分布状态信息;再以该分布状态信息为基准,控制子无人机群的所有子无人机对污染物进行分布式检测,同时利用子无人机采集自身所处位置的空气流动状态信息,以此估计污染物的扩散趋势,再根据该扩散趋势,反馈调整子无人机的飞行状态;通过地面基站实时接收与分析所有子无人机在整个飞行过程中采集得到的污染物状态数据,以此得到污染物在未来预设时间段内的变化状态信息,其利用子无人机群对已经排放到大气环境中的污染物进行同步跟踪检测,能够获得关于污染物在大气环境的扩散分布数据,从而提高污染物远程分析的准确性和可靠性,以及保证对污染物在大气环境的扩散覆盖范围进行及时的预警。
41、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
42、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!