基于塑料光纤的准分布式液漏检测方法及装置、电子设备与流程
1.本技术涉及光纤传感技术领域,尤其涉及一种基于塑料光纤的准分布式液漏检测方法及装置、电子设备。
背景技术:
2.液漏检测在工业生产、城市生活及军事领域中都有着安全检测的作用。光纤由于其低成本、长距离传输的特点,被广泛应用于分布式光纤温度、应变、振动传感技术,在石油化工、航空航天、民用工程结构、国防等领域发挥着重要作用。本发明使用塑料光纤作为分布式传感及信号传输元件,相比于玻璃光纤,塑料光纤有着更低的成本及灵活性更高的优势,并且塑料光纤有着更好的韧性,更适用于弯曲、振动测量。作为一种多模光纤,塑料光纤有着更大的光纤直径和数值孔径。入射光经过多模光纤散射后在输出端形成干涉散斑图案,如果保持入射光不变,散斑信息就可用于沿着光纤长度的特征监测。相比于基于光纤输出功率的一维信号监测,基于散斑的二维信息监测有着更丰富的信息,对环境变化更灵敏。随着机器学习的发展,各种深度学习方法被用于识别复杂图像,已经证实深度学习可以识别光纤输出端的不同散斑图案。
3.在实现本发明的过程中,发明人发现现有技术中至少存在如下问题:现有的光纤液漏检测技术将液漏检测转变为检测温度或应变的变化,需信号处理过程,影响监测实时性。也有研究团队研发利用led灯带和光纤间耦合,通过扫描led测量输出脉冲信号定位液漏位置,此传感装置需电路控制模块,无法用于水下环境测量。
4.常见的液漏检测传感器采用声学信号分析、压力波检测方法,不适于复杂环境及多漏水点检测,同时传统的电测量方法无法用于水下环境测量。因此,研发一种结构简单且适用于水下测量的免电磁干扰的实时液漏检测装置具有重要意义及应用价值。
技术实现要素:
5.针对现有技术的不足,本技术实施例的目的是提供一种基于塑料光纤的准分布式液漏检测方法及装置、电子设备,目的在于突破现有的光纤液漏监测装置通过测温来判断管道渗漏点的间接监测的方法,目标是利用塑料光纤的易雕刻的优势和神经网络简易实现复杂关系的学习预测的特点,实现一种结构简单、应用广泛的实时液漏监测设备,以便适用于水下航行器、地下液体管道等工业或城市建设所需的液漏监测的复杂场景。
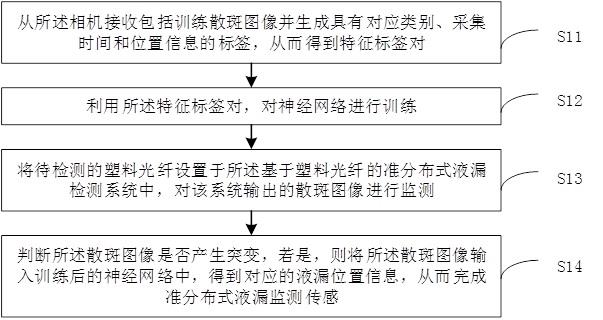
6.根据本技术实施例的第一方面,提供一种基于塑料光纤的准分布式液漏检测方法,应用于一种基于塑料光纤的准分布式液漏检测系统,该系统包括依次连接的激光器、塑料光纤和相机,包括:步骤s11:从所述相机接收包括训练散斑图像并生成具有对应类别、采集时间和位置信息的标签,从而得到特征标签对;步骤s12:利用所述特征标签对,对神经网络进行训练;步骤s13:将待检测的塑料光纤设置于所述基于塑料光纤的准分布式液漏检测系
统中,对该系统输出的散斑图像进行监测;步骤s14:判断所述散斑图像是否产生突变,若是,则将所述散斑图像输入训练后的神经网络中,得到对应的液漏位置信息,从而完成准分布式液漏监测传感。
7.进一步地,所述步骤s11中所述的特征标签对的生成过程包括:将设置有若干检测点的塑料光纤设置于所述基于塑料光纤的准分布式液漏检测系统中,获取系统初始状态对应的若干第零散斑图像;对每个液漏点分别进行液漏操作,得到对应的若干第一散斑图像、第二散斑图像、
……
、第n散斑图像,其中n为液漏点的数量;对每个液漏点分别吸干液漏操作后的液体,得到对应的若干第零散斑图像;对所述第零散斑图像、第一散斑图像、第二散斑图像、
……
、第n散斑图像分别设置对应的标签,从而得到特征标签对,其中所述标签包括图像的类别、采集时间和位置信息。
8.进一步地,其特征在于,所述步骤s12包括:对所述特征标签对中的所有训练散斑图像进行相同的空间采样;将进行空间采样后的所有训练散斑图像输入所述神经网络中,进行所述神经网络的训练。
9.进一步地,所述空间采样为:对每个训练散斑图像,沿散斑圆周截取像素,去除背景全黑部分。
10.进一步地,所述神经网络包括依次连接的卷积层、批标准化层、relu激活层、全连接层、softmax激活层以及优化器。
11.进一步地,步骤s14中,通过散斑相关度是否发生突变来判断所述散斑图像是否产生突变,其中散斑相关度通过pearson公式计算得到。
12.根据本技术实施例的第二方面,提供一种基于塑料光纤的准分布式液漏检测装置,应用于一种基于塑料光纤的准分布式液漏检测系统,该系统包括依次连接的激光器、塑料光纤和相机,包括:接收模块,用于从所述相机接收包括训练散斑图像并生成具有对应类别、采集时间和位置信息的标签,从而得到特征标签对;训练模块,用于利用所述特征标签对,对神经网络进行训练;监测模块,用于将待检测的塑料光纤设置于所述基于塑料光纤的准分布式液漏检测系统中,对该系统输出的散斑图像进行监测;液漏监测模块,用于判断所述散斑图像是否产生突变,若是,则将所述散斑图像输入训练后的神经网络中,得到对应的液漏位置信息,从而完成准分布式液漏监测传感。
13.根据本技术实施例的第三方面,提供一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的方法。
14.根据本技术实施例的第三方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如第一方面所述方法的步骤。
15.本技术的实施例提供的技术方案可以包括以下有益效果:
由上述实施例可知,本技术相比于常见的分布式光纤测温传感基于单模光纤的时域反射及通过测温来间接监测判断管道渗漏点的方法,本方案利用光纤输出端散斑变化直接监测液漏的发生,满足实时监测的需求;相比于led灯带和光纤耦合的方案,本方案使用一根塑料光纤作为传感元件,结构简单易制作;利用光纤的模式色散输出二维空间散斑图案,灵敏度高,通过神经网络学习分辨不同位置发生液漏,可以抑制环境温度变化等引起的散斑渐变噪声,网络搭建简单易实现;使用常见的低成本的可见光相机就可完成信号采集。
16.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
17.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
18.图1是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测方法的流程图。
19.图2是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的结构示意图。
20.图3是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的实验输出散斑图。
21.图4是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的光纤局部传感结构图。
22.图5是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的实验一个位置液漏操作时的散斑相关度曲线图。
23.图6是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的实验光纤无操作时的随环境渐变的散斑相关度曲线图。
24.图7是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的实验三个位置液漏操作时的散斑相关度曲线及导数曲线图。
25.图8是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测系统的实验三个位置液漏操作时的不同位置液漏散斑图。
26.图9是本发明提供的一种基于塑料光纤的液漏检测方法的散斑数据的空间采样;图10是本发明提供的一种基于塑料光纤的液漏检测方法的散斑空间独立采样后的神经网络输入图像。
27.图11是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测方法的卷积神经网络的结构模块组成图。
28.图12是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测方法的网络训练过程示意图。
29.图13是根据一示例性实施例示出的一种基于塑料光纤的准分布式液漏检测装置的框图。
30.图14是根据一示例性实施例示出的一种电子设备的示意图。
31.图中:1、氦氖激光器;2、塑料光纤;3、可见光相机。
具体实施方式
32.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。
33.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
34.应当理解,尽管在本技术可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本技术范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”。
35.图1是根据一示例性实施例示出的基于塑料光纤2的准分布式液漏检测方法的流程图,如图1所示,该方法应用于如图2所示的一种基于塑料光纤2的准分布式液漏检测系统,该系统包括依次连接的激光器、塑料光纤2和可见光相机3,可以包括以下步骤:步骤s11:从所述相机接收包括训练散斑图像并生成具有对应类别、采集时间和位置信息的标签,从而得到特征标签对;步骤s12:利用所述特征标签对,对神经网络进行训练;步骤s13:将待检测的塑料光纤2设置于所述基于塑料光纤2的准分布式液漏检测系统中,对该系统输出的散斑图像进行监测;步骤s14:判断所述散斑图像是否产生突变,若是,则将所述散斑图像输入训练后的神经网络中,得到对应的液漏位置信息,从而完成准分布式液漏监测传感。
36.由上述实施例可知,本技术相比于常见的分布式光纤测温传感基于单模光纤的时域反射及通过测温来间接监测判断管道渗漏点的方法,本方案利用光纤输出端散斑变化直接监测液漏的发生,满足实时监测的需求;相比于led灯带和光纤耦合的方案,本方案使用一根塑料光纤2作为传感元件,结构简单易制作;利用光纤的模式色散输出二维空间散斑图案,灵敏度高,通过神经网络学习分辨不同位置发生液漏,可以抑制环境温度变化等引起的散斑渐变噪声,网络搭建简单易实现;使用常见的低成本的可见光相机3就可完成信号采集。
37.本技术中基于塑料光纤2的准分布式液漏检测系统包括激光器、塑料光纤2和可见光相机3,激光器直接耦合进塑料光纤2,在光纤末端输出散斑,成像到相机。在一实施例中,塑料光纤2的纤芯直径为1mm,相机为海康威视可调焦相机,型号为ds-u34w,像素为480*640,实验光源为氦氖激光器1,型号为thorlabs的hnls008r-ec,输出波长约为632.8nm,输出功率为0.5mw。该系统利用塑料光纤2的模式色散,不同模式的传播速度不同,相位变化不同,在输出端形成干涉散斑图样。由于输出散斑图样的每一个像素点由多个模式光干涉形成,散斑图案对光纤结构非常敏感,将光纤作为传感元件,监测输出二维空间散斑信息可以得到灵敏度非常高的传感器。本方案液漏传感就是利用光纤上不同位置处发生包层折射率变化,导致模式传输路径发生不同的改变,在光纤输出端形成不同的干涉散斑图样,因此可
以通过形成的散斑图像实现准分布式液漏传感。如图3所示,为塑料光纤2的输出散斑图案。
38.在步骤s11的具体实施中,从所述相机接收包括训练散斑图像并生成具有对应类别、采集时间和位置信息的标签,从而得到特征标签对;在一实施例中,设置有若干检测点的塑料光纤2的制备过程为:如图4所示,在一根2m长,纤芯直径1mm的塑料光纤2上侧面用刀片粗糙的挖出一个小槽,使纤芯暴露在外,液漏发生时,此处包层从空气变为液体,折射率发生变化,导致模式传输路径发生改变,在光纤输出端形成的干涉散斑图样改变。在距离激光和相机一定的距离的光纤的两端分别挖一个小槽,再在中间挖一个槽,本实施例中初步实验验证三个液漏点的液漏定位准确度。
39.在本实施例中,系统包括氦氖激光器1、衰减片、可见光相机3,笔记本电脑。其中,有氦氖激光器1作为光源,塑料光纤2制作的传感元件,海康威视相机作为散斑图像采集,由于激光器输出激光功率太大,成像散斑颗粒太亮,不利于作为差异性指纹标志,因此加入了1%的透过率的衰减片。具体的,激光直接耦合进塑料光纤2,在光纤末端输出散斑,成像到相机。实验时所用氦氖激光器1需要预热半小时才能稳定,才可进行实验操作。需要注意的是,由于是可见光成像,必须保证实验背景全黑,可见光相机3只采集到红色可见光的散斑图案。
40.实验模拟液漏传感区域发生液漏,采集散斑视频数据,根据计算散斑相关性曲线,验证液漏实验是否确实会对输出散斑造成改变;在证实液漏监测装置的有效性后,对三个液漏传感区域依次进行液漏模拟实验,观察不同液漏点位置发生液漏后的散斑是否不同,验证液漏检测装置的准分布式监测的能力。
41.(1)首先我们验证液漏实验是否确实会对输出散斑造成改变。即光纤上某一处包层的折射率发生改变,对光纤输出端的散斑的影响。开始采集相机视频数据,用注射器在某一个液漏点完成模拟漏水的操作,注意到散斑的突变,等几秒再将水吸回去,观察散斑是否恢复到未漏水状态的光强分布。整个液漏操作过程要避免注射器针头触碰到光纤,使光纤发生形变。如图5所示,为记录到的实验一个位置液漏操作时的散斑变化视频的每一帧散斑图案与初始散斑的相关度曲线变化。可以看见散斑相关度随时间缓慢下降,某一时刻发生突变,即实验模拟液漏发生,当把模拟液漏处的水吸走时,散斑相关度有所回升。证实了我们的液漏监测装置的有效性,散斑相关度降低是包层折射率的变化导致散斑变化,当包层折射率恢复成空气时,散斑也恢复到原来的光强分布状态,散斑相关度回升。从散斑相关度曲线可以识别到液漏的发生。同时我们通过长时间不操作光纤,监测光纤输出散斑稳定性,得到散斑相关度缓慢下降,如图6所示。证明环境会导致散斑缓慢变化,而液漏会导致散斑突变。
42.散斑相关度计算采用pearson公式计算不同时刻散斑图像的相关系数,公式如下:对每两帧散斑图像计算相关度,即为第一帧散斑图像一个像素点的灰度值,即为另一帧散斑图像一个像素点的灰度值,为像素点数量,为第一帧散斑图像所有像素点的灰度值的平均值,为另一帧散斑图像所有像素点的灰度值的平均值。
43.(2)验证不同液漏点位置发生液漏后的散斑是否不同。只有不同液漏点位置发生液漏后的散斑不同,才能对不同液漏点发生液漏进行识别。开始采集相机视频数据,用注射器在第一个液漏点完成模拟漏水的操作,等十秒再将水吸回去,再依次在第二个液漏位置模拟液漏现象,等十秒后再将水吸回,再进行第三个点的液漏操作,等十秒后将水吸回,再等十秒后结束相机数据采集。同样计算视频每一帧的散斑图与初始散斑图的相关性,计算相关性曲线的导数,如图7所示,观察到三个液漏操作及吸水时间位置,导数曲线可以看出采集的视频信息中图像的前后帧相关性,及散斑变化率,突变和渐变发生时间很容易区分。如图8所示,可以看到不同位置液漏后散斑不同,即证明此液漏监测装置可以实现液漏点位置的监测,完成准分布式液漏监测。
44.具体地,所述的特征标签对的生成过程包括:步骤s21:将设置有若干检测点的塑料光纤2设置于所述基于塑料光纤2的准分布式液漏检测系统中,获取系统初始状态对应的若干第零散斑图像;步骤s22:对每个液漏点分别进行液漏操作,得到对应的若干第一散斑图像、第二散斑图像、
……
、第n散斑图像,其中n为液漏点的数量;步骤s23:对每个液漏点分别吸干液漏操作后漏出的液体,得到对应的若干第零散斑图像;步骤s24:对所述第零散斑图像、第一散斑图像、第二散斑图像、
……
、第n散斑图像分别设置对应的标签,从而得到特征标签对,其中所述标签包括图像的类别、采集时间和位置信息。
45.在步骤s21-步骤s24的具体实施中,通过对塑料光纤2上多个位置剥去塑料外套并用热刀片挖槽,暴露部分纤芯,使得液漏时,光纤包层及部分纤芯从空气变为液体,折射率发生变化,引起传输光场的边界条件突变,导致纤芯中的模式传输发生变化,从而使得输出散斑产生确定的变化。本实施例中在塑料光纤2上设置三个液漏点,通过上述实验装置及实验数据采集方法,我们得到实验操作的可见光相机3采集的视频数据文件。根据观察的散斑变化情况,读取视频中三个不同液漏位置的液漏操作后的散斑,每一个液漏位置读取400帧散斑图像,记为三类标签,分别为c1,c2,c3。c代表从距离相机最近的液漏点记起,依次标号。读取视频中三个不同液漏位置的液漏操作吸干水操作后的散斑,每一个液漏位置读取100帧散斑图像,以及实验初始状态时的散斑100帧,记为一类标签,0。这样就获得四类标签,总共1600个特征标签对。特征即散斑图像,标签即对散斑图像采集的视频时间位置的分类。
46.在步骤s12的具体实施中,利用所述特征标签对,对神经网络进行训练;具体地,在获取每一帧所需散斑图像之后,对每一帧图像都转为灰度值图像,进行相同的空间采样,以减小数据集大小。对所述特征标签对中的所有训练散斑图像进行相同的空间采样,将进行空间采样后的所有训练散斑图像输入所述神经网络中,进行所述神经网络的训练。
47.在一实施例中,所述空间采样可以为对每个训练散斑图像,沿散斑圆周截取像素,去除背景全黑部分,可以有效减少散斑像素数,减少网络参数,提高网络训练速度,同时也减少了背景噪声的影响;更具体地,选取以散斑圆心为中心,直径为正方形边长来提取散斑图像,将视频提取的每一帧散斑图像从像素480*640裁剪为301*301的散斑灰度图像。将裁
剪后的数据用于网络训练,在网络结构和网络训练参数相同的情况下,训练时间缩短了14倍,极大的提高了网络训练效率。
48.在另一实施例中,所述空间采样还可以为根据散斑计算空间相关宽度,即每一个散斑颗粒占多少像素,间隔空间相关宽度选取像素值,可以很大程度减少散斑图像的冗余数据,网络连接参数变少,加快网络训练速度。更具体地,对单张散斑图像进行空间相关计算,得到平均的每个散斑颗粒的像素大小为20个像素,原始散斑图像素为480*640,为剔除冗余数据,对每张散斑图像提取空间独立信道,更大程度的减少单张散斑图像数据,得到像素为17*20的散斑矩阵。如图9所示,提取散斑圆圈内的独立空间信道,加号标记为提取的散斑空间独立信道。如图10所示,为部分空间独立信道采样后的散斑图像示例。第一列为第一个液漏点液漏时的散斑空间采样矩阵,依次第二列为第二类标签,第三列为第三类标签;两行展示每一类标签的两个特征图像。 可以发现不同位置液漏后的散斑差异性,以及实验重复性的同一位置液漏后散斑的相似性。
49.具体地,所述神经网络可以包括依次连接的卷积层、批标准化层、relu激活层、全连接层、softmax激活层。
50.这是由于实际应用中图像的分辨率都很高,如果对输入图像直接采用全连接网络,待优化的参数过多,容易导致过拟合。为了解决待优化参数量过大而导致网络模型产生过拟合的问题,一般不会将原始图像直接输入全连接网络,而是先对原始图像进行特征提取,然后再将提取到的特征作为全连接网络的输入。我们采用最简单的图形分类网络,卷积神经网络对输入散斑图像和输出位置标签通过前向传播和反向传播进行网络参数训练。将训练好的模型保存下来,输入新的特征数据,通过前向传播实现预测。
51.如图4所示,输入散斑图像经过卷积核提取特征后,对一小批数据(batch)的输出做标准化处理,标准化即使数据符合0均值,1为标准差的分布,可以加速网络收敛。批标准化(batch normalization,bn)操作将原本偏移的特征数据重新拉回到0均值,使进入激活函数的数据分布在激活函数线性区,但激活函数就丧失了非线性特性,因此在bn操作中为每个卷积核引入了两个可训练参数,缩放因子γ和偏移因子β,反向传播时与其他待训练参数一同被训练优化,使标准正态分布后的特征数据通过缩放因子和偏移因子优化了特征数据分布的宽窄和偏移量,保证了网络的非线性表达力。由于使用sigmoid和tanh激活函数都容易出现梯度消失,且收敛慢,而relu激活函数不仅没有梯度消失问题,训练速度也快。我们使用relu激活函数后建立全连接层,最后使用softmax激活函数对网络输出概率分布,得到分类预测结果。
52.在本实施例中,使用matlab的深度神经网络工具箱编写网络架构并配置参数。网络是总共包含七层的基本卷积神经网络架构,具体的,先使用20个5*5的卷积核对散斑图像数据进行特征提取;再进行批标准化将原本偏移的特征数据重新拉回到0均值,使进入激活函数的数据分布在激活函数线性区。使用relu激活函数后建立全连接层,输出使用softmax激活函数对网络输出概率分布,得到分类预测结果。将所有数据迭代一次是不够的,需要反复多次更新权重,才能使误差函数收敛,网络训练设置最大迭代次数为4,由于实验所采集的数据有限,本实验每次迭代将所有训练数据集分为9个batch送入网络训练。网络输入送入每一类75%的特征标签对用于训练,其余部分用于网络的验证。网络参数的训练过程是通过前向计算,反向传播,优化器更新网络参数,使损失函数最小。对于训练好的网络,我们输
入散斑图像,通过前向计算,得到分类预测结果,更具体地,输出分类结果就是标签c0,c1,c2或者c3,代表未发生液漏和液漏位置1,2,3。
53.神经网络是基于连接的人工智能,网络结构确定后,网络参数的确定对模型的表达力影响也很大,更新模型参数的过程仿佛是在教一个孩子理解世界,达到学龄的孩子,脑神经元的结构、规模是相似的,他们都具备了学习的潜力,但是,不同的引导方法会让孩子具备不同的能力,达到不同的高度,优化器就是引导神经网络更新参数的工具。于是对于优化器的选择,我们使用不同优化器的网络训练结果进行了对比。
54.下面结合表1对于优化器的选择进行了分析讨论:(1)sgdm优化器:在sgd基础上增加一阶动量,梯度下降方向由当前点的梯度方向和此前累积的下降方向决定。
55.(2)rmsprop,在sgd基础上增加二阶动量,由于指数移动平均值大约是过去一段时间的平均值,反映“局部的”参数信息,因此用这个方法来计算二阶累积动量。
56.(3)adam,同时结合sgdm的一阶动量和rmsprop的二阶动量,在rmsprop上增加了动量和偏差修正。
57.表1 优化器类型及对应的网络训练结果准确率和网络训练耗时表采用三种不同的优化器的网络训练结果准确率均为100%,网络训练所用时间也相差不多。此训练所用数据是采用空间采样方式一对原始散斑图进行简单裁剪所得。
58.表2 散斑图像及对应的网络训练结果正确率和网络训练耗时表根据上表2,三种不同的输入信息所用的网络结构相同,网络训练参数相同,三种不同的散斑数据作为网络训练的输入散斑图时,可以看出空间采样可以减少网络训练参数,缩短网络训练时间,尤其采用空间独立信道的采样方法,网络训练结构无需使用卷积层特征提取,训练结果显示此空间方法在保持准确度的同时有效的缩短了网络训练时间。但从准确率迭代曲线可以发现散斑像素越大,损失函数收敛越快,只需更少的迭代次数就可以完成网络参数优化。如图12所示,为第三种散斑空间采样数据(即像素值为17*20的散斑图像)作为网络输入的训练过程准确率曲线。
59.网络分类准确度判断,由于分类最后得到结果是字符标签,直接判断每一个验证数据(即每一类25%的特征标签对)的预测结果是否正确,正确为1,不正确为0。取所有的验证网络准确度的数据的预测结果的平均值为网络训练准确度,从而验证了本基于塑料光纤2的准分布式液漏检测方法的有效性。
60.在具体实施中,网络分类准确度评价标准:accuracy = mean(ypred == yvalidation),即网络分类结果ypred与验证数据的标签yvalidation相等记为1,不等记为0,计算平均结果即为网络分类准确度。
61.在步骤s13的具体实施中,将待检测的塑料光纤2设置于所述基于塑料光纤2的准分布式液漏检测系统中,对该系统输出的散斑图像进行监测;具体地,将预先训练好的网络应用于实际应用中,持续监测光纤输出散斑图像,通过计算就可以得到实时液漏监测结果,液漏发生与否,液漏发生位置,实现准分布式液漏监测。
62.在步骤s14的具体实施中,判断所述散斑图像是否产生突变,若是,则将所述散斑图像输入训练后的神经网络中,得到对应的液漏位置信息,从而完成准分布式液漏监测传感。
63.具体地,通过散斑相关度是否发生突变来判断所述散斑图像是否产生突变,其中散斑相关度通过pearson公式计算得到,该计算过程已在步骤s11的具体实施方式部分进行说明,此处不再赘述。预测液漏位置时,通过预先训练好网络,对新采集的散斑图送入训练好的网络,前向计算得到分类结果,只需0.088717 s就可以得到液漏点位置。
64.与前述的基于塑料光纤2的准分布式液漏检测方法的实施例相对应,本技术还提供了基于塑料光纤2的准分布式液漏检测装置的实施例。
65.图13是根据一示例性实施例示出的一种基于塑料光纤2的准分布式液漏检测装置框图。参照图13,该装置应用于一种基于塑料光纤2的准分布式液漏检测系统,该系统包括依次连接的激光器、塑料光纤2和相机,可以包括:接收模块21,用于从所述相机接收包括训练散斑图像并生成具有对应类别、采集时间和位置信息的标签,从而得到特征标签对;训练模块22,用于利用所述特征标签对,对神经网络进行训练;监测模块23,用于将待检测的塑料光纤2设置于所述基于塑料光纤2的准分布式液漏检测系统中,对该系统输出的散斑图像进行监测;液漏监测模块24,用于判断所述散斑图像是否产生突变,若是,则将所述散斑图像输入训练后的神经网络中,得到对应的液漏位置信息,从而完成准分布式液漏监测传感。
66.关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
67.对于装置实施例而言,由于其基本对应于方法实施例,所以相关之处参见方法实施例的部分说明即可。以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本技术方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
68.相应的,本技术还提供一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述的基于塑料光纤2的准分布式液漏检测方法。如图14所示,为本发明实施例提供的一种基于塑料光纤2的准分布式液漏检测方法所在任意具备数据处理能力的
设备的一种硬件结构图,除了图14所示的处理器、内存以及网络接口之外,实施例中装置所在的任意具备数据处理能力的设备通常根据该任意具备数据处理能力的设备的实际功能,还可以包括其他硬件,对此不再赘述。
69.相应的,本技术还提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如上述的基于塑料光纤2的准分布式液漏检测方法。所述计算机可读存储介质可以是前述任一实施例所述的任意具备数据处理能力的设备的内部存储单元,例如硬盘或内存。所述计算机可读存储介质也可以是外部存储设备,例如所述设备上配备的插接式硬盘、智能存储卡(smart media card,smc)、sd卡、闪存卡(flash card)等。进一步的,所述计算机可读存储介还可以既包括任意具备数据处理能力的设备的内部存储单元也包括外部存储设备。所述计算机可读存储介质用于存储所述计算机程序以及所述任意具备数据处理能力的设备所需的其他程序和数据,还可以用于暂时地存储已经输出或者将要输出的数据。
70.里公开的内容后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。
71.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1