一种车位检测方法和装置与流程
本技术涉及车位检测,特别是涉及一种车位检测方法和装置。
背景技术:
1、智能泊车辅助系统依赖对停车位的准确定位,传统的方法是利用毫米波和超声雷达等传感器的特性,通过经典的点云聚类等算法对泊车场景中的划线车位或空间车位进行定位,但是该类方法依赖雷达传感器的点云精度,在某些泊车场景下由于噪点过多会出现误检;目前还有一类方法是通过摄像头传感器获取地面划线停车位的平面角点坐标,再通过相机系统与物理世界的转换关系得到实际划线车位的空间位置,但是此类方法在遇到摄像头遮挡,光照变化剧烈,雨雾雪等恶劣天气时,由于图像信息的缺失或出错导致误检或漏检,同时依赖地面较完整的停车线作为信息输入,对没有完整划线的空间车位则缺乏先验和泛化能力。
2、综上,目前的车位检测方法均是采用单一传感器的数据对车位进行检测,但是这种方法存在车位检测准确率和可靠性均较低的缺点,亟待解决。
技术实现思路
1、有鉴于此,本技术提供了一种车位检测方法和装置,用于解决现有技术存在的车位检测准确率和可靠性低的问题,其技术方案如下:
2、一种车位检测方法,包括:
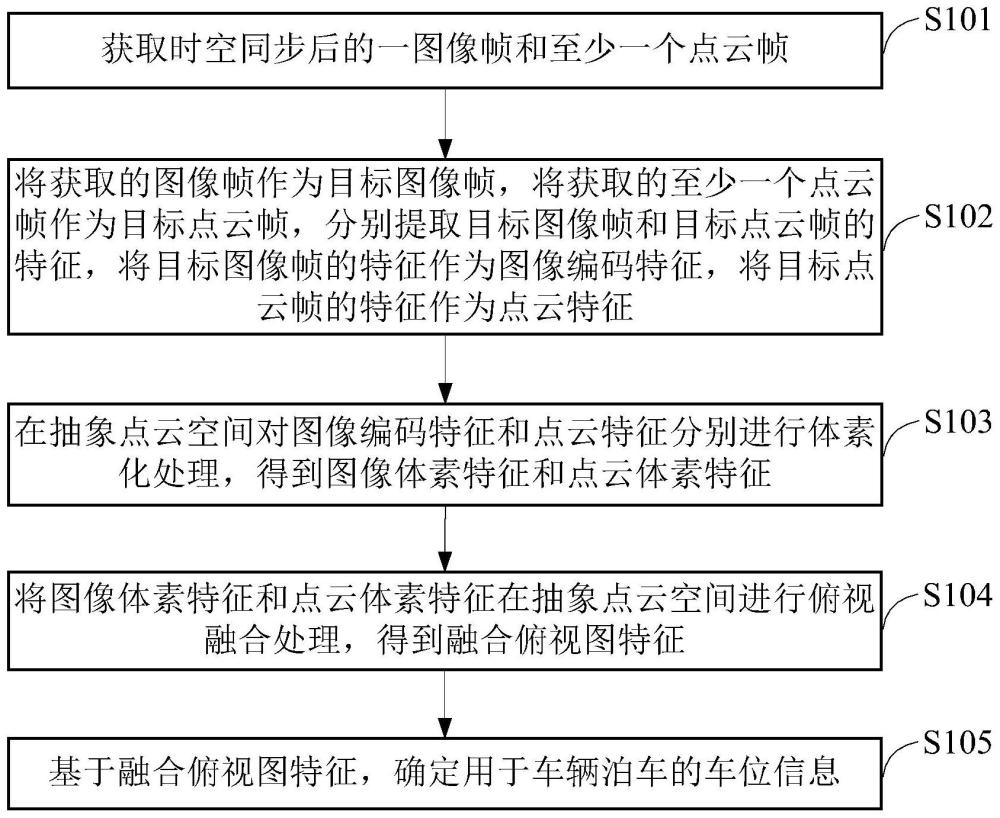
3、获取时空同步后的一图像帧和至少一个点云帧,其中,不同的点云帧基于车辆上的不同类型的雷达传感器采集得到,图像帧基于车辆上的摄像头采集得到,图像帧与每个点云帧的采集时间戳的差值均小于预设时间阈值,图像帧与每个点云帧均处于预先构建的以车辆为中心的抽象点云空间的坐标系下;
4、将获取的图像帧作为目标图像帧,将获取的至少一个点云帧作为目标点云帧,分别提取目标图像帧和目标点云帧的特征,将目标图像帧的特征作为图像编码特征,将目标点云帧的特征作为点云特征,其中,图像编码特征中融合了目标图像帧的语义信息和深度预测信息,点云特征表征点云目标的材质信息和点云目标与车辆的距离信息;
5、在抽象点云空间对图像编码特征和点云特征分别进行体素化处理,得到图像体素特征和点云体素特征;
6、将图像体素特征和点云体素特征在抽象点云空间进行俯视融合处理,得到融合俯视图特征;
7、基于融合俯视图特征,确定用于车辆泊车的车位信息。
8、可选的,获取时空同步后的一图像帧和至少一个点云帧,包括:
9、获取图像帧集和点云帧集,其中,图像帧集包括摄像头采集的多个图像帧,点云帧集包括多个类型的雷达传感器分别采集的多个点云帧,图像帧集中的每个图像帧和点云帧集中的每个点云帧均对应有采集时间戳;
10、从图像帧集和点云帧集中确定采集时间戳满足预设时间阈值要求的一图像帧和至少一个点云帧;
11、构建以车辆为中心的抽象点云空间,并将满足预设时间阈值要求的一图像帧和至少一个点云帧转换到抽象点云空间的坐标系下,得到时空同步后的一图像帧和至少一个点云帧。
12、可选的,提取目标图像帧的特征,包括:
13、将目标图像帧缩放至预设尺寸,得到缩放后的图像帧;
14、提取缩放后的图像帧的语义特征,并将语义特征进行上采样,得到目标维度的特征信息,其中,目标维度的特征信息中包含的预设维度表征目标图像帧的深度预测信息;
15、根据目标维度的特征信息,确定目标图像帧的图像编码特征。
16、可选的,提取目标点云帧的特征,包括:
17、将目标点云帧中不满足抽象点云空间对应的预设空间范围的点云数据筛除,得到筛选点云数据后的目标点云帧;
18、提取筛选点云数据后的目标点云帧的特征。
19、可选的,抽象点云空间预先划分为多个子空间,每个子空间的空间范围相同;
20、在抽象点云空间对图像编码特征进行体素化操作,包括:
21、确定图像编码特征对应的空间坐标张量;
22、将图像编码特征和空间坐标张量进行体素化,以将图像编码特征划分到多个子空间内,得到图像体素特征。
23、可选的,确定图像编码特征对应的空间坐标张量,包括:
24、确定目标图像帧中像素点的深度预测信息;
25、根据目标图像帧中像素点的深度预测信息和目标图像帧中像素点的二维坐标信息,确定目标图像帧中像素点的三维坐标信息;
26、根据目标图像帧中像素点的三维坐标信息,确定图像编码特征对应的空间坐标张量。
27、可选的,将图像体素特征和点云体素特征在抽象点云空间进行俯视融合处理,得到融合俯视图特征,包括:
28、将图像体素特征中分别位于每个子空间内的体素特征进行和池化处理,得到每个子空间对应的聚合图像体素特征,由各个子空间分别对应的聚合图像体素特征得到第一俯视图特征;
29、将点云体素特征中分别位于每个子空间内的体素特征进行和池化处理,得到每个子空间对应的聚合点云体素特征,由各个子空间分别对应的聚合点云体素特征得到第二俯视图特征;
30、将第一俯视图特征和第二俯视图特征进行叠加融合,得到融合俯视图特征。
31、可选的,基于融合俯视图特征,确定用于车辆泊车的车位信息,包括:
32、对融合俯视图特征进行平面特征提取处理,得到分割特征图;
33、对分割特征图进行区域聚类,得到初始车位信息;
34、对初始车位信息进行矩形化处理,得到矩形化的车位信息;
35、将矩形化的车位信息转换到世界坐标系下,得到世界坐标系下的车位信息;
36、将世界坐标系下的车位信息中不满足预设尺寸阈值的车位信息筛除,得到用于车辆泊车的车位信息。
37、可选的,目标点云帧中包括目标激光点云帧和目标毫米波点云帧,其中,目标激光点云帧为激光雷达传感器采集的点云帧,目标毫米波点云帧为毫米波雷达传感器采集的点云帧。
38、一种车位检测装置,包括:
39、目标帧获取模块,用于获取时空同步后的一图像帧和至少一个点云帧,其中,不同的点云帧基于车辆上的不同类型的雷达传感器采集得到,图像帧基于车辆上的摄像头采集得到,图像帧与每个点云帧的采集时间戳的差值均小于预设时间阈值,图像帧与每个点云帧均处于预先构建的以车辆为中心的抽象点云空间的坐标系下;
40、特征提取模块,用于将获取的图像帧作为目标图像帧,将获取的至少一个点云帧作为目标点云帧,分别提取目标图像帧和目标点云帧的特征,将目标图像帧的特征作为图像编码特征,将目标点云帧的特征作为点云特征,其中,图像编码特征中融合了目标图像帧的语义信息和深度预测信息,点云特征表征点云目标的材质信息和点云目标与车辆的距离信息;
41、体素化模块,用于在抽象点云空间对图像编码特征和点云特征分别进行体素化处理,得到图像体素特征和点云体素特征;
42、特征融合模块,用于将图像体素特征和点云体素特征在抽象点云空间进行俯视融合处理,得到融合俯视图特征;
43、车位检测模块,用于基于融合俯视图特征,确定用于车辆泊车的车位信息。
44、经由上述的技术方案可知,本技术提供的车位检测方法,首先获取时空同步后的一图像帧和至少一个点云帧,然后将获取的图像帧作为目标图像帧,将获取的至少一个点云帧作为目标点云帧,分别提取目标图像帧和目标点云帧的特征,将目标图像帧的特征作为图像编码特征,将目标点云帧的特征作为点云特征,接着在抽象点云空间对图像编码特征和点云特征分别进行体素化处理,得到图像体素特征和点云体素特征,之后将图像体素特征和点云体素特征在抽象点云空间进行俯视融合处理,得到融合俯视图特征,最后基于融合俯视图特征,确定用于车辆泊车的车位信息。本技术能够基于时空同步后的目标图像帧和目标点云帧进行车位检测,在车位检测时能够高效提取图像编码特征和点云特征,并能够将图像编码特征和点云特征分别对应的体素特征在抽象点云空间进行融合,有效提高了车位信息的准确率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!