一种基于深度学习的钢轨表面缺陷检测方法
本发明属于钢轨检测,具体涉一种基于深度学习的钢轨表面缺陷检测方法。
背景技术:
1、随着铁路网络布局的推进和高铁技术的快速发展,钢轨故障诊断维系列车安全运行的重要保障,根据相关安全统计数据显示,钢轨表面缺陷引发的列车安全事故约占所有事故原因的30%[1]。因此,为保障列车的行车安全,对钢轨表面缺陷进行准确、动态的检测已成为铁路发展迫切需要解决的问题,并具有重要的实际应用价值及研究意义。
2、列车运行中,钢轨受到轮轨的挤压、冲击、磨损等接触应力和自然风化的影响,其健康状态和质量不断恶化,从而在表面形成裂纹、塌陷、剥离、磨损、疤痕等缺陷,随着时间的推移,这些缺陷将进一步恶化钢轨造成断轨,从而引发铁路脱轨安全事故。因此,钢轨缺陷的多样性和动态性给轨道检查技术带来了巨大的挑战。
3、1、目前,铁路轨检主要采用物理性的检测方法,主要包括超声波法、电涡流法、磁粉法等,传统的检测方法需要依靠人工操作,且耗费时间、劳动强度高、效率低,同时会给检查人员带来未知的安全隐患。
4、2、近年来,机器视觉以速度快、精度高、可靠性强等优点,被用于表面缺陷识别算。目前研究者faghih-roohis设计了3层卷积层和最大池化层的卷积神经网络结构,提升了缺陷的检测速度,模型区分正常和有表面缺陷的钢轨的准确率可达到92.00%,但只对缺陷进行了检测,没有进行分类。
5、3、研究这袁小翠对otsu方法进行改进,以目标出现的概率为权重,对类间方差的目标方差加权,使分割阈值靠近单模直方图的左边缘和双模直方图的谷底,缺陷检测率和误检率分别达到93%和6.4%,但是该图像分割算法分割出缺陷太费时,满足不了实时性。
6、4、研究者shangl采用基于inception-v3结构的卷积神经网络来区分正常和有缺陷的钢轨图像,模型结构简单,处理速度更快,在测试集上实现了92.08%的识别准确率,但该方法只对疤痕缺陷有效。
7、5、研究者如kumar等对钢轨缺陷图像特征进行分析,通过图像滤波的方式去除干扰噪声,再进行网络训练,提高了表面缺陷的检测效果,但其中的图像增强算法不具有普适性,且图像处理费时。
8、6、研究者韩强等提出一种多层级特征融合的钢轨表面伤损检测方法,融合多个层级不同感受野的图像特征进行目标检测,提升了检测结果的准确性,还降低了对小面积伤损区域的漏检率,但该方法检测的缺陷种类太少,不适用于钢轨的所有缺陷。
9、以上研究更多的关注缺陷的检测,没有对缺陷进行分类识别,且存在图像识别方法不具有普适性、图像处理太费时、满足不了钢轨缺陷检测的实时性等问题。
技术实现思路
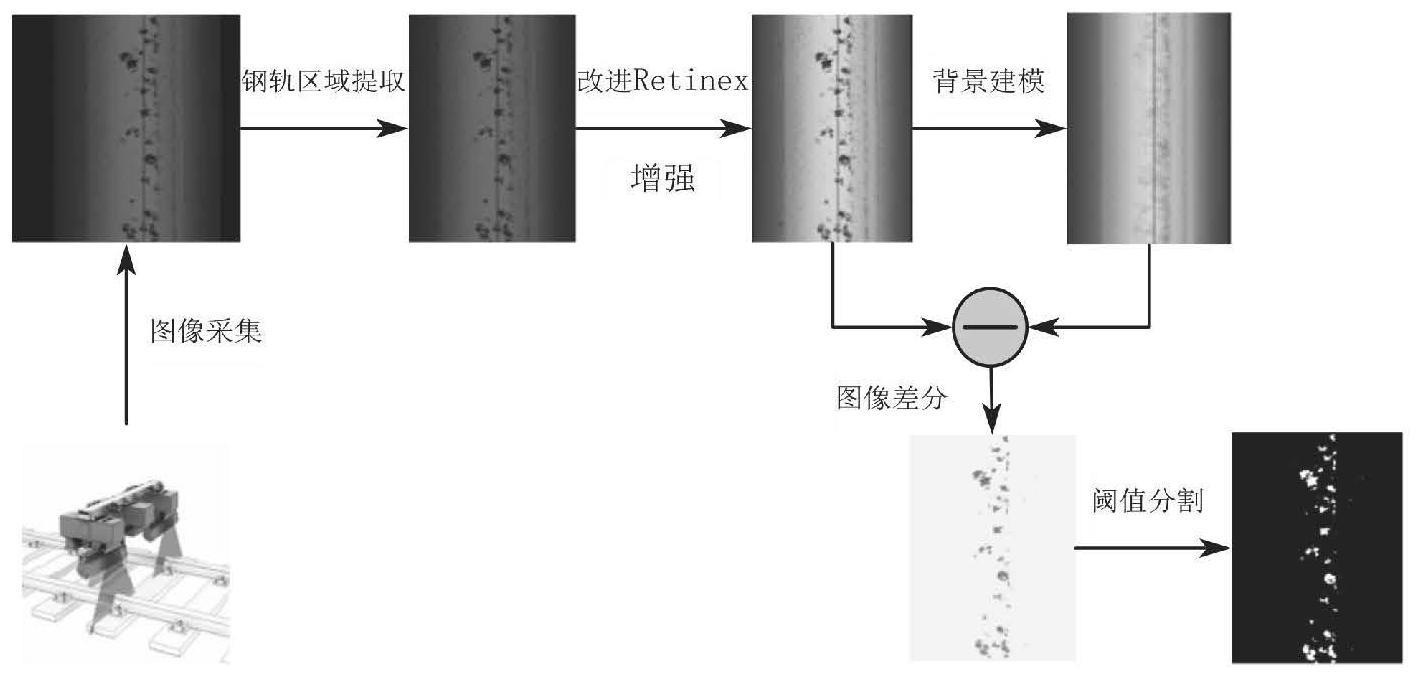
1、为了解决上述技术问题,本发明提供了一种基于深度学习的钢轨表面缺陷检测方法,该方法针对钢轨缺陷边缘不明显、尺寸小、纹理干扰等问题,依次进行钢轨区域提取、改进retinex图像增强、背景建模差分和阈值分割,得到缺陷的分割图。对于缺陷的分类,引入res2net和cbam注意力机制,增大感受野和小目标位置权重,在panet结构中去掉自下而上的路径增强结构,减少参数冗余,提高小目标的特征提取能力。
2、为了达到解决上述技术问题的技术效果,本发明是通过以下技术方案实现的:
3、一种基于深度学习的钢轨表面缺陷检测方法,包括如下步骤:
4、1、首先对钢轨区域进行提取,再通过改进retinex图像增强算法进行图像处理,最后通过背景建模差分和阈值分割得到缺陷的分割图;
5、2、再基于上述算法引入res2net和cbam注意力机制,对于缺陷分隔图进行分类输出,从而得到最终的钢轨缺陷特征图;
6、进一步地,所述钢轨区域提取时,首先采用列直方图最小值法从原始轨道图像中分割出钢轨区域;
7、进一步地,所述改进retinex图像增强算法为多尺度retinex(msr)算法,增强多尺度加权平均得到,其表达式如下:
8、
9、其中,n为总尺度数,一般取3,wn为尺度系数,且满足gn(x,y)表示尺度个数为n的高斯函数。
10、再对量化方式msr算法中引入均值和均方差,加入控制图像动态参数调节对比度,其公式如下:
11、
12、其中,d为图像的动态调节参数,μ、mse分别为log[rmsr(x,y)]中r、g、b各通道数的均值和均方差,value为log[rmsr(x,y)]的值;
13、进一步地,所述背景建模差分先以钢轨为基准建立背景模型:
14、im(x)=mean(iy(x))
15、式中im(x表示第x列图像背景建模,mean(·)为均值函数;再钢轨图像与背景模型图像相减,得到差分图像:
16、
17、式中,i0(x,y)为原图,im(x,y)为建模背景图;
18、进一步地,所述阈值分割先定义niblack阈值:
19、th=μδi+c·δδi
20、式中μδi和δδi分别为δi(x,y的均值和方差,控制因子c为常数,由于差分图像具有零均值的特性,简化后为:
21、th=c·δδi
22、当c=3时,根据得到的阈值th对图像进行分割处理;
23、进一步地,所述res2net是在原有的残差单元结构中增加小的残差块,同时增加了每一层网络的感受野大小;
24、进一步地,所述cbam注意力机制是将钢轨缺陷特征图使用卷积后,再经过激活函数等变换来生成注意力模板,最终使用原特征图与得到的注意力模板作积,得到钢轨缺陷特征图。
25、本发明的有益效果是:
26、1、本发明针对钢轨缺陷边缘不明显、尺寸小、纹理干扰等问题,依次进行钢轨区域提取、改进retinex图像增强、背景建模差分和阈值分割,得到缺陷的分割图。对于缺陷的分类,引入res2net和cbam注意力机制,增大感受野和小目标位置权重,在panet结构中去掉自下而上的路径增强结构,减少参数冗余,提高小目标的特征提取能力。实验结果表明,钢轨缺陷检测平均准确率达到92.68%,召回率达到92.33%,检测速度达到每张图片0.068s。将改进方法与主流目标检测算法fasterrcnn、ssd、yolov3和yolov4对比,结果表明改进yolov4模型在钢轨缺陷检测中的f1值达到0.925,明显优于其他几种主流算法,能够很好地应用于轨道缺陷检测项目中。
27、2、本发明在图像处理部分,首先对采集到的图像进行钢轨区域提取,然后用改进retinex算法增强缺陷边缘信息,再采用背景建模差分法去除背景干扰,最后采用自适应阈值分割法提取出缺陷。改进的retinex算法和背景建模差分法参数很少,处理简单,对缺陷的检测速度影响很小,有利于提升检测时的缺陷召回率。在深度学习方面,首先通过引入cbam注意力机制,增强对缺陷的目标检测能力;再将网络种的resnet残差网络替换成res2net,提高特征的感受野的同时融合多尺度特征;最后在原有特征层的基础上新增一个目标检测层,继续融合浅层特征和深层特征,增大特征检测尺度。尽管增加新的特征检测层会导致网络结构参数量的增加,但去掉panet中小目标发挥有限的自下而上的路径增强结构来减少参数冗余,整体上只比yolov4增加13ms,十分接近yolov4的检测速度。改进后的结构不仅继承了原有结构的特征融合效果,而且能在降低网络参数的同时获取更浅层的特征,提高小目标的特征提取能力。
28、3、本发明改进yolov4目标检测算法对钢轨缺陷实现了高效准确的检测,其中裂纹、疤痕、磨损、剥落4种缺陷的识别精度分别达到了94.8%、94.0%、89.7%、92.2%。其准确率,召回率均高于其他主流目标检测算法。本文提出的检测算法在保证高检测精度的同时保证了检测速度,更适用于执行钢轨表面伤损检测任务。
- 还没有人留言评论。精彩留言会获得点赞!