一种用于路面车辆识别的交通遥感图像处理方法
1.本发明涉及遥感图像处理技术领域,具体为一种用于路面车辆识别的交通遥感图像处理方法。
背景技术:
2.遥感图像在现代地球观测中发挥着重要作用,遥感图像,或称遥感照片,是各种传感器所获信息的产物,是遥感探测目标的信息载体,就像我们生活中拍摄的照片一样,遥感图像同样可以“提取”出大量有用的信息,遥感平台从高空俯视地面,能够大范围、全区域地判别整个城市的交通状况,一次性获取城市整体交通状况信息(即影像数据),非常有利于从全局角度为交通指挥决策提供依据,目前主要的交通遥感图像处理方式是通过图像灰度阈值分割技术,区分遥感图像中的道路和汽车。
3.现有的利用灰度阈值分割技术来区分遥感图像中的道路和汽车的技术在实际使用过程中,由于车辆颜色的多样性,车辆在道路上行驶时往往会由于车辆颜色与道路路面的颜色接近而导致车辆识别时的区分不清晰,从而产生遗漏。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种用于路面车辆识别的交通遥感图像处理方法,解决了上述背景技术中提出的问题。
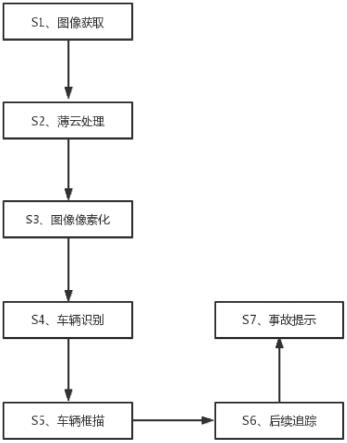
5.为实现以上目的,本发明通过以下技术方案予以实现:一种用于路面车辆识别的交通遥感图像处理方法,所述交通遥感图像处理方法包括下述步骤:
6.s1、图像获取:
7.通过无人机遥感获取交通图像,图像为两张,两张图像是同一地理区域几秒前和几秒后的交通图像,具体的时间前后的交通图像可根据需求加以适应性设置,其中同一地理区域一秒前的交通图像为图像a,同一地理区域一秒后的交通图像为图像b;
8.s2、薄云处理:
9.无人机传感器接收的数字编号值描述为加法模型,具体公式如下:
10.xa=xg+xc11.其中,xs是无人机传感器获取的dn值,xg是没有云影响的地面覆盖的dn值,xc是大气效应,取决于薄云的厚度,xc定义为薄云厚度图,从多云图像中减去薄云厚度图可以恢复出清晰图像,两张图像均是采用此处理以消除薄云影响;
12.s3、图像像素化:
13.经过薄云处理的两张图像保持灰度化并像素化;
14.s4、车辆识别:
15.以道路路面和道路两侧的绿化带为参考物,道路路面和道路两侧的绿化带在像素化后于两张图像上的位置保持不变,而车辆由于处于行驶状态,此时代表车辆的像素区域于图像b上的位置与图像a上的位置相比会发生位移,由此识别出图像b上行驶中的车辆;
16.s5、车辆框描:
17.基于图像b上被识别出来的车辆像素区域,对该像素区域的轮廓进行描画以对该被识别出来的车辆进行框选,并记录下该框选的像素区域的像素轮廓和像素点的数量;
18.s6、后续追踪:
19.基于被记录下来的像素轮廓和像素点的数量,在后续识别与追踪该车辆时只需扫描识别出与该像素轮廓和像素点数量一致的像素区域即可识别出该车辆。
20.进一步的,所述s2步骤中,dn值是遥感影像像元亮度值,记录的地物的灰度值。
21.进一步的,所述s2步骤中,对于多光谱遥感图像,薄云厚度通常随波长增加而减小,各波段薄云厚度图呈线性相关,假设给定参考薄云厚度图第i个波段的薄云厚度图和之间的比例系数为ai,ai称为第i个波段的厚度系数,可表示为:
[0022][0023]
然后,从下式获得第i个波段的清晰图像:
[0024][0025]
进一步的,所述s3步骤中,图像像素化后分辨率为1920
×
1080,分辨率为1920
×
1080即表示有1920
×
1080个像素点,其中分辨率可根据计算机算力上下调整,但分辨率越高则越容易识别出车辆。
[0026]
进一步的,所述s6步骤中,被记录下来的像素轮廓和像素点的数量代表一辆车辆,对该记录下来的像素轮廓和像素点的数量所代表的像素区域进行编号,且编号唯一。
[0027]
进一步的,所述交通遥感图像处理方法还包括下述步骤:
[0028]
s7、事故提示:
[0029]
基于所代表车辆的像素区域的轮廓被描画的情况下于后期进行对轮廓进行描红,后期于显示设备上通过描红后的车辆轮廓表示为一个车辆,若两个描红用的红线发生接触则表示有两辆车辆发生接触的可能,对于两个红线接触的图像于显示设备上进行显示。
[0030]
本发明提供了一种用于路面车辆识别的交通遥感图像处理方法,具备以下有益效果:
[0031]
该用于路面车辆识别的交通遥感图像处理方法可以消除薄云对图像清晰度的影响,且基于两张图像上代表车辆的像素区域的位置变化来准确识别车辆,且不管车辆在行驶或停止状态下均可识别器位置,而且会对代表车辆的像素区域的轮廓进行红线描红,并在代表不同车辆的两个红线相接触时以提示观测人员该情况表示出现事故,且通过两个红线的重合度以初步表现处事故严重度。
[0032]
1.该用于路面车辆识别的交通遥感图像处理方法,利用薄云厚度通常随波长增加而减小的原理,通过计算出某一波段的厚度系数,并从多云图像中减去薄云厚度图可以恢复出该波段下清晰的交通图像,由此可以消除云、雾、霾对图像清晰度的影响,从而提高交通图像的清晰度。
[0033]
2.该用于路面车辆识别的交通遥感图像处理方法,同一地理区域一秒前的交通图像为图像a,同一地理区域一秒后的交通图像为图像b,以道路路面和道路两侧的绿化带在像素化后于两张图像上的位置保持不变并以此作为参照物,基于车辆处于行驶状态的情况
下,代表车辆的像素区域于图像b上的位置与图像a上的位置相比会发生位移,由此识别出图像b上行驶中的车辆,并大幅度缩短车辆识别所需步骤。
[0034]
3.该用于路面车辆识别的交通遥感图像处理方法,基于图像b上被识别出来的车辆像素区域,对该像素区域的轮廓进行描画以对该被识别出来的车辆进行框选,并记录下该框选的像素区域的像素轮廓和像素点的数量,而基于被记录下来的像素轮廓和像素点的数量,后期基于该车辆的像素轮廓和像素点的数量即使在车辆处于停止状态下也可识别出该车辆的位置,而基于记录下来的像素轮廓和像素点的数量所代表的像素区域进行编号,编号具有唯一性,通过编号可以在车辆行驶状态下快速查询到该车辆在交通图像上的位置。
[0035]
4.该用于路面车辆识别的交通遥感图像处理方法,基于所代表车辆的像素区域的轮廓被描画的情况下于后期进行对轮廓进行描红,后期于显示设备上通过描红后的车辆轮廓表示为一个车辆,若两个描红用的红线发生接触则表示有两辆车辆发生接触的可能,对于两个红线接触的图像于显示设备上进行显示,以便视察人员做好事故处理准备,若两个红线仅是边缘接触,则出警人员做好准备并是在有人报警的情况下快速出警,其中若出现两个红线接触且红线之间高度重合的图像时,可以先锁定红线接触部位所在区域并配合交通道路上的探头观测现场情况,以确定是否需要立即出警,此时并不需要有人报警从而快速出警,从而缩短出警反应时间,加快出警速度。
附图说明
[0036]
图1为具有薄云的遥感图像示意图;
[0037]
图2为本发明一种用于路面车辆识别的交通遥感图像处理方法的薄云去除后的图像示意图;
[0038]
图3为本发明一种用于路面车辆识别的交通遥感图像处理方法的运行流程示意图。
具体实施方式
[0039]
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
[0040]
如图1-图3所示,本发明提供一种技术方案:一种用于路面车辆识别的交通遥感图像处理方法,所述交通遥感图像处理方法包括下述步骤:
[0041]
s1、图像获取:
[0042]
通过无人机遥感获取交通图像,图像为两张,两张图像是同一地理区域几秒前和几秒后的交通图像,具体的时间前后的交通图像可根据需求加以适应性设置,其中同一地理区域一秒前的交通图像为图像a,同一地理区域一秒后的交通图像为图像b;
[0043]
s2、薄云处理:
[0044]
无人机传感器接收的数字编号值描述为加法模型,具体公式如下:
[0045]
xs=xg+xc[0046]
其中,xs是无人机传感器获取的dn值,xg是没有云影响的地面覆盖的dn值,xc是大气效应,取决于薄云的厚度,xc定义为薄云厚度图,从多云图像中减去薄云厚度图可以恢复
出清晰图像,两张图像均是采用此处理以消除薄云影响;
[0047]
其中,dn值是遥感影像像元亮度值,记录的地物的灰度值;
[0048]
而对于多光谱遥感图像,薄云厚度通常随波长增加而减小,各波段薄云厚度图呈线性相关,假设给定参考薄云厚度图第i个波段的薄云厚度图和之间的比例系数为ai,ai称为第i个波段的厚度系数,可表示为:
[0049][0050]
然后,从下式获得第i个波段的清晰图像:
[0051][0052]
利用薄云厚度通常随波长增加而减小的原理,通过计算出某一波段的厚度系数,并从多云图像中减去薄云厚度图可以恢复出该波段下清晰的交通图像,由此可以消除云、雾、霾对图像清晰度的影响,从而提高交通图像的清晰度;
[0053]
s3、图像像素化:
[0054]
经过薄云处理的两张图像保持灰度化并像素化;
[0055]
其中,图像像素化后分辨率为1920
×
1080,分辨率为1920
×
1080即表示有1920
×
1080个像素点,其中分辨率可根据计算机算力上下调整,但分辨率越高则越容易识别出车辆;
[0056]
s4、车辆识别:
[0057]
以道路路面和道路两侧的绿化带为参考物,道路路面和道路两侧的绿化带在像素化后于两张图像上的位置保持不变,而车辆由于处于行驶状态,此时代表车辆的像素区域于图像b上的位置与图像a上的位置相比会发生位移,由此识别出图像b上行驶中的车辆;
[0058]
其中基于环境因素的考虑,道路两侧的绿植即使在风速影响下由于绿植的位置固定性其枝叶并不会大范围位移;
[0059]
s5、车辆框描:
[0060]
基于图像b上被识别出来的车辆像素区域,对该像素区域的轮廓进行描画以对该被识别出来的车辆进行框选,并记录下该框选的像素区域的像素轮廓和像素点的数量;
[0061]
s6、后续追踪:
[0062]
基于被记录下来的像素轮廓和像素点的数量,在后续识别与追踪该车辆时只需扫描识别出与该像素轮廓和像素点数量一致的像素区域即可识别出该车辆;
[0063]
其中,被记录下来的像素轮廓和像素点的数量代表一辆车辆,对该记录下来的像素轮廓和像素点的数量所代表的像素区域进行编号,且编号唯一;
[0064]
交通遥感图像处理方法还包括下述步骤:
[0065]
s7、事故提示:
[0066]
基于所代表车辆的像素区域的轮廓被描画的情况下于后期进行对轮廓进行描红,后期于显示设备上通过描红后的车辆轮廓表示为一个车辆,若两个描红用的红线发生接触则表示有两辆车辆发生接触的可能,对于两个红线接触的图像于显示设备上进行显示。
[0067]
综上,如图1-图3所示,该用于路面车辆识别的交通遥感图像处理方法,使用时,首先通过无人机遥感获取交通图像,图像为两张,两张图像是同一地理区域几秒前和几秒后
的交通图像,具体的时间前后的交通图像可根据需求加以适应性设置,其中同一地理区域一秒前的交通图像为图像a,同一地理区域一秒后的交通图像为图像b,其中,一秒前后并不为固定参数可根据实际需求上下调整;
[0068]
而无人机传感器接收的数字编号值描述为加法模型,具体公式如下:
[0069]
xs=xg+xc[0070]
其中,xs是无人机传感器获取的dn值,xg是没有云影响的地面覆盖的dn值,xc是大气效应,取决于薄云的厚度,xc定义为薄云厚度图,从多云图像中减去薄云厚度图可以恢复出清晰图像,两张图像均是采用此处理以消除薄云影响;
[0071]
其中,dn值是遥感影像像元亮度值,记录的地物的灰度值;
[0072]
而对于多光谱遥感图像,薄云厚度通常随波长增加而减小,各波段薄云厚度图呈线性相关,假设给定参考薄云厚度图第i个波段的薄云厚度图和之间的比例系数为ai,ai称为第i个波段的厚度系数,可表示为:
[0073][0074]
然后,从下式获得第i个波段的清晰图像:
[0075][0076]
而经过薄云处理的两张图像保持灰度化并像素化,且两张图像在像素化后分辨率为1920
×
1080,即表示有1920
×
1080个像素点,其中分辨率可根据计算机算力上下调整,但分辨率越高则越容易识别出车辆;
[0077]
再以道路路面和道路两侧的绿化带为参考物,道路路面和道路两侧的绿化带在像素化后两者所代表的像素区域于两张图像上的位置保持不变,其中基于环境因素的考虑,道路两侧的绿植即使在风速影响下由于绿植的位置固定性其枝叶并不会大范围位移,而车辆由于处于行驶状态,此时代表车辆的像素区域于图像b上的位置与图像a上的位置相比会发生位移,由此识别出图像b上行驶中的车辆;
[0078]
基于图像b上被识别出来的车辆像素区域,对该像素区域的轮廓进行描画以对该被识别出来的车辆进行框选,并记录下该框选的像素区域的像素轮廓和像素点的数量,基于被记录下来的像素轮廓和像素点的数量,在后续识别与追踪该车辆时只需扫描识别出与该像素轮廓和像素点数量一致的像素区域即可识别出该车辆,其中,被记录下来的像素轮廓和像素点的数量代表一辆车辆,对该记录下来的像素轮廓和像素点的数量所代表的像素区域进行编号,且编号唯一;
[0079]
其中,于图像b上被识别出来的车辆像素区域,对该像素区域的轮廓进行描画以对该被识别出来的车辆进行框选,并记录下该框选的像素区域的像素轮廓和像素点的数量,而基于被记录下来的像素轮廓和像素点的数量,后期基于该车辆的像素轮廓和像素点的数量即使在车辆处于停止状态下也可识别出该车辆的位置,而基于记录下来的像素轮廓和像素点的数量所代表的像素区域进行编号,编号具有唯一性,通过编号可以在车辆行驶状态下快速查询到该车辆在交通图像上的位置;
[0080]
基于所代表车辆的像素区域的轮廓被描画的情况下于后期进行对轮廓进行描红,后期于显示设备上通过描红后的车辆轮廓表示为一个车辆,若两个描红用的红线发生接触
则表示有两辆车辆发生接触的可能,对于两个红线接触的图像于显示设备上进行显示,以便视察人员做好事故处理准备,若两个红线仅是边缘接触,则出警人员做好准备并是在有人报警的情况下快速出警,其中若出现两个红线接触且红线之间高度重合的图像时,可以先锁定红线接触部位所在区域并配合交通道路上的探头观测现场情况,以确定是否需要立即出警,此时并不需要有人报警从而快速出警,从而缩短出警反应时间,加快出警速度;
[0081]
其中基于道路高度不同,会有上下道路重合交错的情况,会导致车辆于不同平面上发生重合,此时会导致两个红线重合而造成误判,基于此两根红线接触时需先判定该两个车辆是否位于同一高度的同一道路上,具体解决方法是两根红线接触时基于图像所显示的区域获取道路信息,从而确定该区域各道路的高度并与图像上的道路相对应,然后在判断是否是两个车辆发生接触。
[0082]
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1