基于改进哈里斯鹰优化算法的光伏模型的参数识别方法与流程
1.本发明涉及光伏模型参数识别领域和智能优化的技术领域,尤其涉及基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
背景技术:
2.为了提高太阳能的利用效率,促进光伏发电的良性发展。需要对光伏系统进行建模,并对模型参数进行精确识别,从而确定光伏系统的输出特性,实现最优的pv系统优化运行和控制,实现光伏系统的高效设计。现有多种在实际中应用成熟的光伏模型,包括单二极管(sdm)、双二极管(ddm)等模型,它们在简洁性或准确度有各自优点,并且能很好地描述光伏组件的伏安特性。针对光伏模型参数识别,已有很多智能优化算法及改进方法被广泛应用,如中国专利(公告号cn115062537a)提出了一种基于醉汉漫步混沌狼群算法的光伏电池模型参数辨识方法,近些年来更是有应用近些年出现的优化算法如鲸鱼优化、樽海鞘群算法的研究出现,然而尽管这些算法在收敛速度上有了很大提升,但仍然有参数设置不当导致偏离优解、容易陷入局部最优解等问题。哈里斯鹰优化算法有较强的全局搜索能力,收敛速度快,并且需要调节的参数较少的优点。同时将非线性能量递减策略应用于转换阶段、将levy飞行策略应用于个体位置更新中,使算法跳出局部最优解,获得更佳的寻优精度。
3.本发明在现有光伏模型的基础上,采用更精确双二极管模型并对等效电路模型进行局部简化,得到输出特性函数;之后,对于输出特性中所需要确定的参数,以实际值与计算值的误差(rmse)为目标函数,将改进哈里斯鹰优化算法应用到目标函数,以实际值迭代寻优。
技术实现要素:
4.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
5.鉴于上述现有针对光伏模型参数识别的优化算法参数设置不当,导致的偏离优解以及容易陷入局部最优解等问题,提出了本发明。
6.因此,本发明目的是提供基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
7.为解决上述技术问题,本发明提供如下技术方案:
8.第一方面,本发明实施例提供了基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,包括:
9.采集双二极管模型中的串并联电池个数,获取串并联光伏阵列等效电路模型;
10.对所述串并联光伏阵列等效电路模型进行解析得到输出特性函数,确定所要识别的参数;
11.通过最小化实际值与模型计算值之差的均方根误差构造目标函数;
12.将改进哈里斯鹰优化算法应用于所述目标函数,获得未知参数的最优值;
13.根据后续实际电流电压功率数据对得到的各参数值进行验证,并实现参数迭代更新。
14.作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:对所述串并联光伏阵列等效电路模型进行解析得到输出特性函数,确定所要识别的参数包括,
15.设串并联光伏阵列中的每个光伏电池输出特性相同,并通过简化后得到所述串并联光伏阵列等效电路模型;
16.所述串并联光伏阵列等效电路模型中各电气量与双二极管模型中各电气量之间关系为:阵列光生电流i
ph-sp
,二极管饱和电流i
d1-sp
、i
d2-sp
以及并联电阻i
sh-sp
均为双二极管模型m倍;
17.综合电路模型中各电气量表达式得到光伏系统模型的单一照度下输出特性i-v函数,具体公式如下:
[0018][0019]
其中,i
l-sp
和v
l-sp
为光伏发电系统输出电流和输出电压,i
ph-sp
,i
sd1-sp
,i
sd2-sp
和i
sh-sp
分别为光伏发电系统的光生电流、扩散电流、饱和电流和并联电阻电流,i
ph
为光生电流,i
sd1
和i
sd2
分别为单体光伏电池的双二极管模型的扩散电流和饱和电流,n1和n2分别为扩散和复合二极管理想因子,ki为短路电流温度系数,t为环境温度,n1和n2分别为扩散和复合二极管理想因子,q为电子电荷,k为波兹曼常数,r
sh-sp
和r
s-sp
分别为串并联光伏阵列中的并联电阻和串联电阻,r
sh
和rs分别为双二极管模型中的串联和并联电阻,m为并联光伏电池数量,n为串联光伏电池数量;
[0020]
考虑天气因素下输出特性函数为多自变量函数,具体公式如下:
[0021][0022]
其中,i
sc
为短路电流,ki为短路电流温度系数,t和s分别为光照强度和环境温度,
t
ref
和s
ref
分别为标准环境温度和标准光照强度;
[0023]
光伏系统模型在单一照度下,i
ph
、i
sd1
、i
sd2
、n1、n2、rs和r
sh
为所需要确定的参数;
[0024]
涉及天气因素时,ki、i
sd1
、i
sd2
、n1、n2、rs和r
sh
为所需要确定参数。
[0025]
作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:通过最小化实际值与模型计算值之差的均方根误差构造目标函数包括,
[0026]
将最小化实际值与估计值之差的均方根误差rmse作为总体差异的量化值构造目标函数,并通过调整每一代解向量x的最小化目标函数rmse(x)进行寻优;
[0027]
其中,解向量和目标函数具体公式如下:
[0028][0029][0030]
x=(i
ph
,i
sd1
,i
sd2
,n1,n2,r
sh
,r
h)
[0031][0032]
其中,最小化实际值为光伏发电系统输出电流、输出电压以及解向量x中涉及变量的最小的实际值,n为实验数据个数,m=1、2、3
…
n。
[0033]
作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:将改进哈里斯鹰优化算法应用于所述目标函数,获得未知参数的最优值包括搜索阶段、计算初始适应度、探索到局部开发阶段、开发阶段以及结束。
[0034]
作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:搜索阶段包括初始化种群,根据搜索空间每一维的上界和下界,初始化每个个体。
[0035]
作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:计算初始适应度包括将适应度最优的个体位置设为当前猎物位置。
[0036]
作为本发明所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法,其中:探索到局部开发阶段、开发阶段以及结束包括,
[0037]
采用非线性能量递减策略,根据逃逸能量e的动态变化选择围捕阶段和不同的追捕策略;
[0038]
开发阶段为根据逃逸能量e与逃脱概率r采取不同的攻击策略;
[0039]
其中,逃逸能量e具体公式如下:
[0040]
e=2e0e1[0041][0042]
其中,e0为初始能量,t和t分别为当前迭代次数和最大迭代次数;
[0043]
若|e|≥0.5且r≥0.5,则采用软围攻策略;
[0044]
若|e|≤0.5且r≥0.5时,则采用硬围攻策略;
[0045]
若|e|>0.5且r<0.5,则采用渐进式快速俯冲的软包围策略;
[0046]
若|e|<0.5且r<0.5,则采用渐进式快速俯冲的硬包围策略;
[0047]
当逃脱概率r小于0.5时,且位置更新后的适应度未较上次有所改善,则采用levy飞行策略更新开发阶段的个体位置,计算位置更新后的适应度,并根据适应度更新“猎物”位置;
[0048]
直到达到最大迭代次数,输出最优值和适应度。
[0049]
第二方面,本发明实施例提供了基于改进哈里斯鹰优化算法的光伏模型的参数识别系统,包括,
[0050]
模型搭建模块,用于根据现有双二极管模型中的串并联电池个数,简化电路模型,得到串并联光伏阵列等效电路模型;
[0051]
模型解析模块,用于对所述串并联光伏阵列等效电路模型进行解析得到输出特性函数,确定所要识别的参数,并通过最小化实际值与模型计算值之差的均方根误差构造目标函数;
[0052]
算法改进模块,用于改进哈里斯鹰优化算法;
[0053]
输出模块,用于根据后续实际电流电压功率数据对得到的各参数值进行验证,并实现参数迭代更新。
[0054]
第三方面,本发明实施例提供了一种计算设备,包括:
[0055]
存储器和处理器;
[0056]
所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如本发明任一实施例所述的基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
[0057]
第四方面,本发明实施例提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现所述基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
[0058]
本发明的有益效果:本发明所建模型符合实际情况,同时将需要识别的光伏系统参数转化为单个电池参数识别,进行详解,并考虑实际运行当中温度、辐射度环境等因素对光伏发电系统输出特性的影响;本发明算法不仅收敛速度快,而且需要调整参数较少,避免了需要调整过多参数而错过优质解的问题;此外本发明还在算法探索转开发阶段提出非线性能量递减策略,提升算法后期局部开发性能和寻优精度,在开发阶段应用levy飞行策略更新个体位置来跳出局部最优解,实现更快更精准的光伏模型参数识别。
附图说明
[0059]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0060]
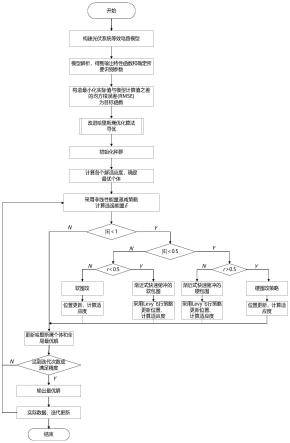
图1为本发明基于改进哈里斯鹰优化算法的光伏模型的参数识别方法的流程图。
具体实施方式
[0061]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
[0062]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
[0063]
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
[0064]
再其次,本发明结合示意图进行详细描述,在详述本发明实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
[0065]
实施例1
[0066]
参照图1,为本发明的一个实施例,提供了基于改进哈里斯鹰优化算法的光伏模型的参数识别方法包括:
[0067]
如图1所示,本发明的步骤如下:
[0068]
s1:采集双二极管模型中的串并联电池个数,获取串并联光伏阵列等效电路模型。应说明的是:
[0069]
单体光伏电池采用双二极管模型,得到m
×
n串并联的光伏阵列等效电路模型。
[0070]
s2:对串并联光伏阵列等效电路模型进行解析得到输出特性函数,确定所要识别的参数。应说明的是:
[0071]
双二极管模型中各电气量的具体公式如下:
[0072][0073][0074][0075][0076]
其中,i
ph
为光生电流,i
d1
和i
d2
分别为流过二极管d1和d2的电流,i
sh
为并联电阻电流,i
sc
为短路电流,ki为短路电流温度系数,t,s分别为光照强度和环境温度,t
ref
和s
ref
分别为标准环境温度和标准光照强度,i
sd1
和i
sd2
分别为扩散电流和饱和电流,n1和n2分别为扩散和复合二极管理想因子,q为电子电荷,k为波兹曼常数,rs和r
sh
分别为串联和并联电阻。
[0077]
设串并联光伏阵列中的每个光伏电池输出特性相同,并通过简化后得到串并联光伏阵列等效电路模型。
[0078]
串并联光伏阵列等效电路模型中各电气量与双二极管模型中各电气量之间关系为:阵列光生电流i
ph-sp
,二极管饱和电流i
d1-sp
、i
d2-sp
以及并联电阻i
sh-sp
均为双二极管模型m
倍。
[0079]
其中,串并联电阻的具体公式如下:
[0080][0081]
其中,r
sh-sp
和r
s-sp
分别为串并联光伏阵列中的并联电阻和串联电阻,r
sh
和rs分别为双二极管模型中的串联和并联电阻,m为并联光伏电池数量,n为串联光伏电池数量。
[0082]
综合电路模型中各电气量表达式得到光伏系统模型的单一照度下输出特性i-v函数,具体公式如下:
[0083][0084][0085]
其中,i
l-sp
和v
l-sp
为光伏发电系统输出电流和输出电压,i
ph-sp
,i
sd1-sp
,i
sd2-sp
和i
sh-sp
分别为光伏发电系统的光生电流、扩散电流、饱和电流和并联电阻电流,i
sd1
和i
sd2
分别为单体光伏电池的双二极管模型的扩散电流和饱和电流,n1和n2分别为扩散和复合二极管理想因子,ki为短路电流温度系数,t为环境温度,n1和n2分别为扩散和复合二极管理想因子;q为电子电荷,k为波兹曼常数;
[0086]
考虑天气因素下输出特性函数为多自变量函数,具体公式如下:
[0087][0088]
其中,i
sc
为短路电流,ki为短路电流温度系数,t和s分别为光照强度和环境温度,t
ref
和s
ref
分别为标准环境温度和标准光照强度;
[0089]
光伏系统模型在单一照度下有i
ph
、i
sd1
、i
sd2
、n1、n2、rs和r
sh
七大需要确定的参数;
[0090]
涉及天气因素时,不确定参数光生电流i
ph
转为求短路电流i
sc
和短路电流系数ki,由于短路电流i
sc
厂家可提供,则ki、i
sd1
、i
sd2
、n1、n2、rs和r
sh
为所需要确定参数,且该输出特性函数不仅受温度t影响,还受到辐射度s影响。
[0091]
s3:通过最小化实际值与模型计算值之差的均方根误差构造目标函数。应说明的
是:
[0092]
将最小化实际值与估计值之差的均方根误差rmse作为总体差异的量化值构造目标函数,并通过调整每一代解向量x的最小化目标函数rmse(x)进行寻优。
[0093]
其中,解向量和目标函数具体公式如下:
[0094][0095]
x=(i
ph
,i
sd1
,i
sd2
,n1,n2,r
sh
,r
h)
[0096][0097]
其中,最小化实际值为光伏发电系统输出电流、输出电压以及解向量x中涉及变量的最小的实际值,n为实验数据个数,m=1,2,3
…
n。
[0098]
s4:将改进哈里斯鹰优化算法应用于目标函数,获得未知参数的最优值。应说明的是:
[0099]
包括搜索阶段、计算初始适应度、探索到局部开发阶段、开发阶段以及结束。
[0100]
搜索阶段包括初始化种群,根据搜索空间每一维的上界和下界,初始化每个个体。
[0101]
计算初始适应度包括将适应度最优的个体位置设为当前猎物位置。
[0102]
探索到局部开发阶段、开发阶段以及结束包括采用非线性能量递减策略,根据逃逸能量e的动态变化选择围捕阶段和不同的追捕策略。
[0103]
开发阶段为根据逃逸能量e与逃脱概率r采取不同的攻击策略。
[0104]
其中,逃逸能量e具体公式如下:
[0105]
e=2e0e1[0106][0107]
其中,e0为初始能量,t和t分别为当前迭代次数和最大迭代次数。
[0108]
若|e|≥0.5且r≥0.5,则采用软围攻策略。
[0109]
若|e|≤0.5且r≥0.5时,则采用硬围攻策略。
[0110]
若|e|>0.5且r<0.5,则采用渐进式快速俯冲的软包围策略。
[0111]
若|e|<0.5且r<0.5,则采用渐进式快速俯冲的硬包围策略。
[0112]
当逃脱概率r小于0.5时,且位置更新后的适应度未较上次有所改善采用levy飞行策略更新开发阶段的个体位置,计算位置更新后的适应度,并根据适应度更新“猎物”位置。
[0113]
直到达到最大迭代次数,输出最优值和适应度。
[0114]
s5:根据后续实际电流电压功率数据对得到的各参数值进行验证,并实现参数迭代更新。
[0115]
本实施例还提供基于改进哈里斯鹰优化算法的光伏模型的参数识别系统,包括:
[0116]
模型搭建模块,用于根据现有双二极管模型中的串并联电池个数,简化电路模型,得到串并联光伏阵列等效电路模型。
[0117]
模型解析模块,用于对串并联光伏阵列等效电路模型进行解析得到输出特性函数,确定所要识别的参数,并通过最小化实际值与模型计算值之差的均方根误差构造目标函数。
[0118]
算法改进模块,用于改进哈里斯鹰优化算法。
[0119]
输出模块,用于根据后续实际电流电压功率数据对得到的各参数值进行验证,并实现参数迭代更新。
[0120]
本实施例还提供一种计算设备,适用于基于改进哈里斯鹰优化算法的光伏模型的参数识别方法的情况,包括:
[0121]
存储器和处理器;存储器用于存储计算机可执行指令,处理器用于执行计算机可执行指令,实现如上述实施例提出的基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
[0122]
该计算机设备可以是终端,该计算机设备包括通过系统总线连接的处理器、存储器、通信接口、显示屏和输入装置。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的通信接口用于与外部的终端进行有线或无线方式的通信,无线方式可通过wifi、运营商网络、nfc(近场通信)或其他技术实现。该计算机设备的显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
[0123]
本实施例还提供一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述实施例提出的实现基于改进哈里斯鹰优化算法的光伏模型的参数识别方法。
[0124]
本实施例提出的存储介质与上述实施例提出的数据存储方法属于同一发明构思,未在本实施例中详尽描述的技术细节可参见上述实施例,并且本实施例与上述实施例具有相同的有益效果。
[0125]
实施例2
[0126]
本实施例为本发明的另一个实施例,对本方法中采用的技术效果加以验证说明。
[0127]
通过比对粒子群优化算法(pso)、遗传算法(ga)、鲸鱼优化算法(woa)和哈里斯鹰(hho)优化算法和本文提出改进哈里斯鹰优化算法(mhho)在同一数据序列下均独立迭代运行50次后的和各算法收敛后得到的rmse值进行比较,如下表所示:
[0128]
表1:不同算法目标函数值统计结果比较表。
[0129][0130]
由独立运行50次和算法收敛后的rmse结果可知,本发明提供的改进哈里斯鹰优化算法(mhho)性能最佳,同时比照算法运行50次和收敛的结果,本发明算法运行50次是的模型参数结果也最接近收敛结果,收敛速度更快。
[0131]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1