用于进口导叶控制容差不确定性的分析方法及实验件
(ζ)和实验的输出值f2(ζ);
12.步骤5:基于步骤4所求得的不同样本点下压气机的数值模拟的输出值f1(ζ)和实验的输出值f2(ζ),利用公式(10),通过非嵌入式混沌多项式方法nipc求得数值模拟与实验的多项式系数ci;
[0013][0014]
步骤6:基于步骤4中数值模拟的输出值f1(ζ)和实验的输出值f2(ζ),步骤5所求两组多项式系数ci,对带任意角度进口导叶的压气机的性能参数或稳定裕度进行预测,获得两组预测模型;对于给定任意进口导叶角度ζ,通过步骤2求得其任意角度ζ所对应的ψj(ζ),随后将ψj(ζ)代入不同预测模型即求得任意角度ζ对应的数值模拟的预测输出值f
′1(ζ)与实验的预测输出值f
′2(ζ);
[0015]
步骤7:针对步骤6求得的两组预测输出值,将数值模拟与实验所得的两组预测模型所得预测值互相对照,验证预测模型的准确度;当验证结果满足要求进入步骤8,不满足则返回步骤4重新计算;
[0016]
步骤8:通过输入大量符合进口导叶控制容差的概率分布函数的采样点、并预测其输出值,能够得到输出值的概率分布函数,即完成进口导叶控制容差不确定性的分析。
[0017]
本发明的进一步技术方案是:所述步骤1中,当进口导叶控制容差的概率分布函数为规则的概率分布函数时,采用连续概率密度分布函数求解采样点;当进口导叶控制容差的概率分布函数为实际的概率分布,采用离散方法来求取采样点。
[0018]
本发明的进一步技术方案是:所述步骤1中,设f(θ)是概率空间上关于m维随机变量ζi(θ)的随机过程,则其广义多项式的混沌展开式为:
[0019][0020]
式中,xi为正交多项式项,ci为多项式系数;ζi(θ)为m维随机变量;
[0021]
由于进口导叶控制容差为一维问题,式(1)简化为:
[0022][0023]
式中:ci为多项式系数;ψj(ζ)为对应角度ζ的j阶正交多项式的值。当处理1维随机变量问题时,式(2)的求和上限p=n,n为nipc方法的阶数。
[0024]
不同的规则的概率分布函数,采用所对应的不同正交多项式基计算n阶正交多项式n+1个零点,记为采样点ζi。
[0025]
本发明的进一步技术方案是:所述步骤1中,当进口导叶控制容差的概率分布函数为规则的概率分布函数时,进一步是高斯分布时,样本点ζi的值为高斯分布对应的正交多项式——n+1阶hermite多项式h
n+1
的零点,n为所采用nipc方法的阶数,hermite多项式如式(3)所示:
[0026][0027]
式中,ξ为进口导叶角度。
[0028]
本发明的进一步技术方案是:所述步骤1中,当进口导叶控制容差的概率分布函数为实际的概率分布时,设θi为进口导叶实际概率密度函数分布的角度大小,矩阵阶数为n+2阶,n为所采用nipc方法的阶数,则构造矩阵m:
[0029][0030]
且det(m)》0;随后对矩阵m进行cholesky分解,得到矩阵r和r的逆矩阵r-[0031][0032]
根据且r
0,0
=1,r
0,0
=0四个式子,利用式(5)得到矩阵j
[0033][0034]
对矩阵j求解得到其特征值和特征向量,所有特征值即为进口导叶角度的样本点ζi。
[0035]
本发明的进一步技术方案是:所述步骤2中,当进口导叶控制容差的概率分布函数为高斯分布时,ψj(ζ)=hj(ζ),hj(ζ)为j阶hermite多项式,如式(3)所示;当进口导叶控制容差的概率分布函数为实际的概率分布时,ψj(ζ)利用式(7)计算:
[0036]
ζψ
j-1
(ζ)=b
j-1
ψ
j-2
(ζ)+ajψ
j-1
(ζ)+bjψj(ζ)
ꢀꢀꢀꢀꢀꢀꢀ
(7)
[0037]
其中,ψ-1
=0,ψ0=1。
[0038]
本发明的进一步技术方案是:所述步骤3中,当进口导叶控制容差的概率分布函数为高斯分布时,采用式(8)求解:
[0039][0040]
当进口导叶控制容差的概率分布函数为实际的概率分布时,所述步骤1求得的矩阵j的特征值对应特征向量的第一个元素的平方则为该样本点求积系数aj。
[0041]
本发明的进一步技术方案是:所述步骤4中,进口导叶角度下,可预测的压气机的
性能参数包括总压比、等熵效率。
[0042]
本发明的进一步技术方案是:所述步骤6中,预测模型公式如式(2)所示。
[0043]
一种用于进口导叶控制容差不确定性的实验件,其特征在于:包括机匣和导叶叶片,所述机匣为环形结构,其内沿周向设置有若干叶片安装槽;所述导叶叶片呈直叶片,若干导叶叶片一一对应安装于各叶片安装槽内。
[0044]
本发明的进一步技术方案是:所述导叶叶片的叶型由实验室转子的某个截面的压力面型线构造而成;导叶叶型偏转点为导叶的重心,导叶偏转是导叶沿整个叶高整体偏转;
[0045]
所述机匣包括同轴设置且结构对称的上环体和下环体,上、下环体的安装面上均沿周向开有叶片安装槽;机匣外端面设计有装配孔和装卸孔。
[0046]
有益效果
[0047]
本发明的有益效果在于:
[0048]
(1)在对进口导叶控制容差的不确定性分析时,所面对的往往是成百上千个原始角度分布,对每一个角度进行数值模拟所需要的时间成本太高,用一个角度代替周围一部分角度会导致精度不够。而步骤1中对进口导叶控制容差的概率分布函数进行处理,只需对样本点进行数值模拟,且当样本点个数为6个时其精度已足够。该发明大大减少了在研究进口导叶控制容差的不确定性时所需要的数值模拟的时间,并同时保证了精度。
[0049]
(2)在进行进口导叶控制容差的不确定性的学术研究中,进口导叶控制容差的概率分布函数一般采用常见分布,而工程实际中通常会有许多种分布且每种分布都没有现成的数学表达式,这给不确定性研究造成了很大的困难。本发明根据进口导叶角度加工误差的概率密度函数分布为常见分布或工程实际分布,在步骤1提出了两种不同的处理方法,可以适应不同的应用场景,具有普适性。
[0050]
(3)进口导叶实验件采用分体装配式设计,只需要加工一个机匣和所需要角度的叶片,减少了成本,经济性较好。
[0051]
(4)在对进口导叶控制容差的不确定性分析时,可宏观对发动机某一性能参数或稳定裕度的不确定性进行分析。如图(1)所示,当进口导叶控制容差的概率分布函数为高斯分布时(ζ~n(0,0.52)),对某一个带进口导叶的压气机进行不确定性分析并得到其稳定裕度的概率分布函数。预测得到的稳定裕度的概率分布函数为高斯分布,其均值为0.0294,标准差为0.1881。
附图说明
[0052]
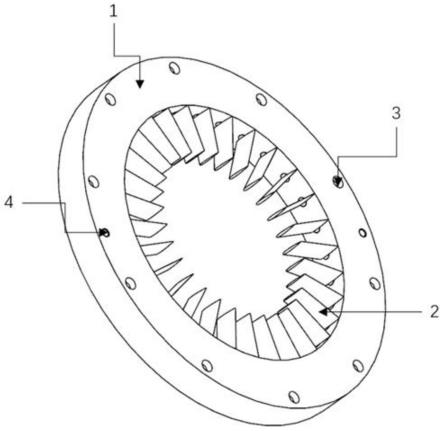
图1为本发明提供的进口导叶整体结构示意图;
[0053]
图2为本发明提供的机匣结构示意图;
[0054]
图3为本发明提供的导叶叶片结构示意图;
[0055]
图4为实例中压气机稳定裕度的cfd数值模拟值与预测模型预测值对比验证结果;
[0056]
图5为压气机稳定裕度的概率分布函数;
[0057]
附图标记说明:1—机匣;2—叶片;3—装配孔;4—拆卸孔;5-叶片安装槽;6-叶片安装部分。
具体实施方式
[0058]
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0059]
下面结合附图1至附图3对本技术做进一步详细说明。
[0060]
本实施例用于进口导叶控制容差不确定性的分析方法,该方法能够通过计算几个不同进口导叶角度的样本点,构建混沌多项式后预测进口导叶控制容差的不确定性对压气机性能影响。针对进口导叶角度加工误差的概率密度分布函数是连续分布或离散分布的不同,处理方法也不同。具体步骤如下:
[0061]
步骤1:针对进口导叶控制容差的概率分布函数,采用不同的样本点求取方法,得到所需的进口导叶偏转角度样本点。
[0062]
当进口导叶控制容差的概率分布函数为规则的概率分布函数时,设f(θ)是概率空间上关于m维随机变量ζi(θ)的随机过程,则其广义多项式的混沌展开式为:
[0063][0064]
式中:xi——正交多项式项
[0065]ci
——多项式系数
[0066]
由于进口导叶控制容差为一维问题,所以式(1)可简化为:
[0067][0068]
式中:ci为多项式系数;ψj(ζ)为对应角度ζ的j阶正交多项式的值。当处理1维随机变量问题时,式(2)的求和上限p=n,n为nipc方法的阶数。
[0069]
不同的连续概率密度分布函数,其对应的正交多项式基也不同。表1列出了一些常见的概率分布函数及其对应的正交多项式基。
[0070]
表1常见的概率分布函数及其对应的正交多项式基
[0071][0072]
此处只举例说明进口导叶控制容差的概率分布函数为高斯分布的情况,其正交多项式基为hermite多项式。1维随机变量ξ的n阶hermite多项式,写为hn(ξ),其表达式为
[0073][0074]
式中,ξ为进口导叶角度。
[0075]
通过式(3)求得一维的n阶hermite正交多项式n+1个零点,记为采样点ζi。
[0076]
针对进口导叶控制容差的概率分布函数为实际的概率分布,并不符合任何常见的概率密度函数时,式(1)同样适用,但采用离散方法来求取采样点。
[0077]
设θi为进口导叶实际概率密度函数分布的角度大小,矩阵阶数为n+2阶,n为所采用nipc方法的阶数,则可获得矩阵m:
[0078][0079]
且det(m)》0。
[0080]
随后对矩阵m进行cholesky分解
[0081]
得到矩阵r和r的逆矩阵r-[0082]
[0083]
根据且r
0,0
=1,r
0,0
=0四个式子可利用式(5)得到矩阵j:
[0084][0085]
对矩阵j求解得到其特征值和特征向量,所有特征值即为进口导叶角度的样本点ζi。
[0086]
步骤2:针对步骤一所求样本点,求得各样本点对应的n阶多项式的值ψj。
[0087]
当进口导叶控制容差的概率分布函数为高斯分布时,ψj(ζ)=hj(ζ),hj(ζ)为j阶hermite多项式,如式(2)所示;
[0088]
当进口导叶控制容差的概率分布函数为实际的概率分布时,ψj(ζ)利用式(7)计算。
[0089]
ζψ
j-1
(ζ)=b
j-1
ψ
j-2
(ζ)+ajψ
j-1
(ζ)+bjψj(ζ)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0090]
其中ψ-1
=0,ψ0=1。
[0091]
步骤3:针对步骤1所求样本点,求得样本点ζi对应的求积系数aj。
[0092]
当进口导叶控制容差的概率分布函数为高斯分布时,采用式(8)求解。
[0093][0094]
当进口导叶控制容差的概率分布函数为实际的概率分布时,步骤1求得的矩阵j的特征值对应特征向量的第一个元素的平方值则为该样本点的求积系数aj。
[0095]
步骤4:针对步骤1所求样本点,通过cfd数值模拟和实验得到在不同样本点的进口导叶角度下压气机的性能参数(如总压比,等熵效率)或稳定裕度,所得结果为数值模拟的输出值f1(ζ)和实验的输出值f2(ζ)。
[0096]
步骤5:针对步骤4所求得的不同样本点下压气机的数值模拟的输出值f1(ζ)和实验的输出值f2(ζ),通过非嵌入式混沌多项式方法(non-intrusive polynomial chaos,nipc)求得多项式系数ci,对带任意角度进口导叶的压气机的性能参数或稳定裕度进行预测。
[0097]
对步骤1、步骤2和步骤4所得的所有样本点及其输出值,可通过式(9)表示
[0098][0099]
多项式系数ci的求解采用投影法,投影法是通过将确定解投影到正交基{ψi}来求取混沌多项式系数,如式(10)所示
[0100][0101]
其中aj为步骤3所求对应各采样点处的积分权值。
[0102]
步骤6:基于步骤4中数值模拟的输出值f1(ζ)和实验的输出值f2(ζ),步骤5所求两组多项式系数ci,对带任意角度进口导叶的压气机的性能参数或稳定裕度进行预测,获得两组预测模型;对于给定任意进口导叶角度ζ,通过步骤2求得其任意角度ζ所对应的ψj(ζ),随后将ψj(ζ)代入不同预测模型即求得任意角度ζ对应的数值模拟的预测输出值f
′1(ζ)与实验的预测输出值f
′2(ζ);
[0103]
步骤7:针对步骤6求得的两组预测输出值,将数值模拟与实验所得的两组预测模型所得预测值互相对照,验证预测模型的准确度;当验证结果满足要求进入步骤8,不满足则返回步骤4重新计算;
[0104]
步骤8:通过输入大量符合进口导叶控制容差的概率分布函数的采样点、并预测其输出值,能够得到输出值的概率分布函数,即完成进口导叶控制容差不确定性的分析。
[0105]
实施例:
[0106]
参照图1,本发明进口导叶的结构是由机匣1、叶片2构成,机匣与叶片装配后通过周向10个均布的直径为10mm的螺栓紧固。
[0107]
参照图2,机匣由前后两部分组成,内径为298mm,外径为400mm。在机匣内侧周向均布30个安装槽用以安装叶片,安装槽公差与叶片安装部位一致。机匣表面设置有10个轴向装配孔,并有间隔180
°
的两个拆卸孔方便将导叶安装至试验台。技术人员可根据自身需求选择装配孔和拆卸孔的尺寸与数量。
[0108]
参照图3,叶片整体为直叶片,叶片部分叶高为53mm,叶型轴向弦长为30mm;安装部分径向高度为30.1mm,由叶根开始由两个圆柱体和一个正方体组成,圆柱、长方体与叶片重心位于同一条直线上。两个圆柱分别为直径10mm,高5.1mm的圆柱;直径6mm,高20mm的圆柱。长方体长为10mm,宽为8mm,高为5mm。本实例采用5阶混沌展开式,进口导叶控制容差的概率分布函数选为连续高斯分布,选取进口导叶角度公差为[-1.5
°
,+1.5
°
],则所需要的叶片角度为-1.6622
°
、-0.9446
°
、-0.3084
°
、0.3084
°
、0.9446
°
、1.6622
°
六个角度。
[0109]
参照图4,为一实例中压气机稳定裕度的cfd数值模拟值与预测模型预测值对比验证,横坐标为预测模型预测值,纵坐标为cfd数值模拟值,黑色线为y=x直线。由图4可以看出,预测模型预测值与cfd模拟值吻合较好,能比较准确的预测不同角度下压气机的稳定裕度。
[0110]
技术人员可以根据需求加工所需叶片的角度,来实现对进口导叶控制容差的不确定性研究的实验验证;
[0111]
技术人员可以根据不同实验目的,分别对叶片的叶型进行修改,来实现不同叶型导叶的替换。
[0112]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1