一种地图生成方法、地图展示方法以及装置与流程
1.本技术涉及电子地图技术领域,尤其涉及一种地图生成方法以及装置;本技术还涉及一种地图展示方法以及装置;本技术同时涉及相关的电子设备。
背景技术:
2.大型商场在现代城市中广泛分布;一般的,每家大型商场都拥有多个楼层,每一楼层包括多个店铺。商场的所有者,为了使得自己的投资能够尽快得到回报,需要将各大店铺租给用户或者有意向在商场内开店的客户。而用户在入住之前,为了自身利益的考虑,需要对店铺的位置和周边和内部环境进行综合考察。为了能够向不能亲临现场的客户展示店铺的环境,采取适当的展示方法,向用户展示店铺环境,就显得特别重要。此外,商场开业后,也需要向客户远程展示商场的各个店铺,以便向客户推销商品和店铺。
3.现存的给客户进行展示的三种方法里,均存在一定问题,以下一一说明:
4.(1)通过平面图进行展示;在给用户展示的平面图里,是由设计团队输出设计效果图和cad(computer aided design、即计算机辅助设计)平面图作为招商材料,来给用户进行展示,而这种展示方法无法全方位、多视角立体查看店铺动线及周边。
5.(2)通过现场直播的方式为用户展示铺位现状时,成本较高,并且不能随时满足客户需求。
6.(3)通过拍摄图片或者视频素材为用户进行展示时,因拍摄角度、位置、场景布设未达预期,经常要拍多次才能达到想要的效果,效率较低。
7.因此,如何准确的为用户逼真、全面的展示线下室内环境的真实情况是个需要解决的技术问题。
技术实现要素:
8.本技术提供一种地图生成方法,能够针对具体环境生成三维全景地图,从而解决现有技术中无法全方位、多视角立体查看需要展示的环境,尤其是店铺环境的问题,并且成本低,效率高。
9.一种地图生成方法,包括:
10.以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;
11.基于所述三维全景信息,生成目标场景转化二维图;
12.建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系;
13.基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系;
14.根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi点的全景信息。
15.可选的,所述以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息,包括:
16.在已有的目标场景原始二维图对应的目标场景中,选择点位动线;
17.在所述点位动线中,根据预设规则确定三维全景信息采集点;
18.基于各个所述三维全景信息采集点,在所述目标场景中采集对应每个采集点的三维全景信息将在各个采集点采集的三维全景信息,以及采集点的坐标信息存储为所述目标场景的三维全景信息。
19.可选的,所述基于所述三维全景信息,生成目标场景转化二维图,包括:
20.基于所述目标场景的三维全景信息中的各个采集点的坐标信息,以及对应各个采集点的三维全景信息,获取其中各个方向的点云信息;
21.根据所述点云信息,将所述三维全景信息转换为目标场景的二维图,该二维图就是所述目标场景转化二维图。
22.可选的,所述建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系,包括:
23.在所述目标场景原始二维图中,选择其中所记录的所述目标场景内的第一特征点;
24.依据所述第一特征点的特征,在所述目标场景转化二维图中,找出对应的第二特征点;
25.根据上述步骤确定的所述第一特征点,以及所述第二特征点之间的相互对应的性质,确定所述第一对应关系;;
26.或者,
27.在所述目标场景转化二维图中,选择其中所记录的所述目标场景内的第二特征点;
28.依据所述第二特征点的特征,在所述目标场景原始二维图中,选择对应第一的特征点;
29.根据上述步骤确定的所述第二特征点,以及所述第一特征点之间的相互对应的性质,确定所述第一对应关系。
30.可选的,所述目标场景为商场,所述poi点至少包括所述目标场景中的店铺;所述对应预设的poi点的三维全景信息,包括所述目标场景中的店铺的三维全景信息。
31.可选的,所述poi点进一步包括店铺中的商品、货架、人员。
32.可选的,对应预设的poi点在所述目标场景中的位置,进一步存储与该poi点所在目标场景中的位置相关的推广信息。
33.可选的,所述根据第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,包括:
34.基于目标场景原始二维图的坐标点,确定所述预设poi点;
35.根据所述预设poi点在目标场景原始二维图中的坐标,根据所述第二对应关系,获得采集三维场景原始二维图时的与所述poi点关联的位置点;
36.将所述位置点采集的三维全景信息,作为所述预设poi点的三维全景信息;或者,根据与所述poi点关联的位置点相对于所述poi点在目标场景转化二维图中对应点的位置
关系,结合其他位置点获得的三维全景信息,进行偏移校正后的三维全景信息作为所述poi点的三维全景信息。
37.此外,本技术还提供一种地图生成装置,包括:
38.采集单元,用于以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;
39.生成单元,用于基于所述三维全景信息,生成目标场景转化二维图;
40.第一建立单元,用于建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系;
41.第二建立单元,基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系;
42.存储单元,用于根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi兴趣点的全景信息。
43.本技术还提供一种电子设备,包括:
44.处理器;
45.存储器,用于存储程序,所述程序在被所述处理器读取执行时,执行如下操作:
46.以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;
47.基于所述三维全景信息,生成目标场景转化二维图;
48.建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系;
49.基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系;
50.根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi点的全景信息。
51.本技术还提供一种地图展示方法,包括:
52.基于用户针对目标场景原始二维图中poi点的触发操作,
53.展示poi点的全景信息。
54.可选的,所述用户为目标场景原始二维图的使用者。
55.可选的,所述基于用户针对目标场景原始二维图中poi点的触发操作,展示poi点的全景信息,包括:
56.基于用户针对目标场景原始二维图中poi点的触发操作,建立所述目标场景原始二维图中的poi点与目标场景三维全景信息中的poi点的对应关系;
57.根据所述目标场景原始二维图中的poi点与目标场景三维全景信息中的poi点的对应关系,展示poi点的全景信息。
58.本技术还提供一种地图展示装置,,包括:
59.操作单元,用于基于用户针对目标场景原始二维图中poi点的触发操作,
60.展示单元,用于展示poi点的全景信息。
61.本技术还提供一种电子设备,其特征在于,所述电子设备包括:
62.处理器;
63.存储器,用于存储程序,所述程序在被所述处理器读取执行时,执行如下操作:
64.基于所述坐标点对应关系,建立所述目标场景原始二维图与所述目标场景的三维全景信息的对应关系;
65.根据所述目标场景原始二维图与所述目标场景的三维全景信息的对应关系,在所述目标场景原始二维图中,存储对应各个poi点的全景信息。
66.与现有技术相比,本技术具有以下优点:
67.本技术提供一种地图生成方法,以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;基于所述三维全景信息,生成目标场景转化二维图;建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系;基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立准确的第二对应关系;根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的兴趣点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅所述各个poi点的全景信息。本技术以已有的目标场景的原始二维图为依据,将采集到的目标场景的全景信息进行转换得到转化二维图,再通过目标场景转化二维图的坐标点与目标场景原始二维图的坐标点之间第一对应关系,来对目标场景原始二维图进行偏移校正。进而再通过目标场景原始二维图与采集三维全景信息时的位置点对应关系,来存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个poi点的全景信息。本技术中用户在观看目标场景的原始二维图时,点击想要查看的店铺时,可以迅速跳转到店铺的三维全景图中,查看店铺内部以及周边环境的实景,为用户准确的,全面的展示店铺环境的真实情况,为用户带来身临其境的感受。
附图说明
68.图1是本技术提供的一种用户以第一人称视角观察店铺环境的示意图。
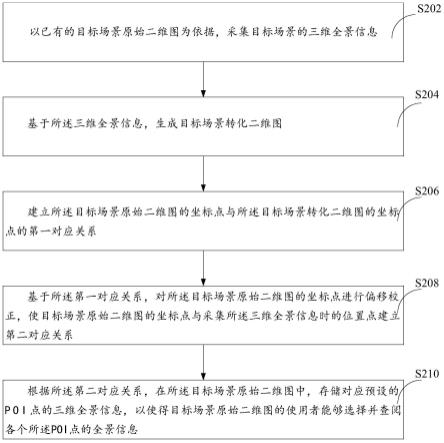
69.图2是本技术提供的一种地图生成方法的流程示意图。
70.图3是本技术提供的一种四层商场示意图。
71.图4是本技术提供的一种商场二层商铺布局简略示意图。
72.图5是本技术提供的一种商场人流行动轨迹的动线示意图。
73.图6是本技术提供的一种上传三维采集信息的示意图。
74.图7是本技术提供的一种特征点的种类选择示意图。
75.图8是本技术提供的一种的第一对应关系示意图。
76.图9是本技术提供的一种的第二对应关系示意图。
77.图10是本技术提供的一种的存储poi点三维全景信息的步骤示意图。
78.图11是本技术提供的一种地图展示方法的流程图;
79.图12是本技术提供的一种地图生成装置示意图;
80.图13是本技术提供的一种地图展示装置示意图。
具体实施方式
81.在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似推广,因此本技术不受下面公开的具体实施的限制。
82.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
83.为了便于理解,在此对本技术的技术背景和具体应用进行简单的整体说明。
84.大型商场在现代城市的生活里必不可少,通常,大型商场中的各个店铺是采用招商方式出租给各种用户,由用户具体经营;对于商场的所有方,对商场内的店铺进行招商的工作非常重要,如果不能吸引到优质的用户入住,就会导致商场的人流量不足,给商场的所有方带来不可难以预估的损失。不难看出,商场所有方在吸引品牌入住时,为用户展示商场内店铺的地理位置和环境的重要性相当之高。
85.然而,现有技术中,一些在招商环境中展示店铺环境的方式,或多或少会存在一些问题。例如,由于当前用户可能会因为一些原因,难以每次都能够去到店铺现场查看商场里的店铺位置以及店铺周边环境的查看。一般招商内部人士会采用拍视频或者直播的方式,来为用户展示铺位现状,然而每次都通过这样的方式来进行招商展示,且还会因为一些其他的原因,导致商场所有者的招商成本较高。亦或者是由设计团队输出设计效果图+cad平面图作为招商材料,来给用户展示,这种方式无法全方位、多视角立体查看店铺的动线及周边。
86.基于上述现存问题,本技术提出了一种将室内地图与全景漫游图融合的方法,为用户提供上帝视角,了解店铺位置、轮廓,即第一人称视角沉浸式漫游店铺内部即周边实景,实现远程在线看铺能力。拍摄人员到达店铺现场,规划拍摄点位动线,在每个点位上拍摄周围环境画面(二维图),采集的前后两个点位之间的画面存在一定的重合部分。在将商场内部全部的点位的环境画面采集完毕后,得到若干点位的不同角度、不同方向的环境画面(二维图)。将得到的若干点位的环境画面上传至商家后台管理平台。后台管理平台对上传的若干图片进行拼接融合处理,将若干图片融合形成全景漫游空间(商场内环境的三维立体图所组合形成的空间)。然后将全景漫游空间再转换成店铺环境的二维图。再基于转换后的二维图来与原始铺位地图中的坐标对应关系,对原来店铺环境的二维地图进行校准。进而建立校准后的原始铺位环境的二维图与全景漫游空间(店铺环境的三维图)的对应关系。使得用户在观看商场环境的店铺二维地图时,点击对应的店铺后,可以直接跳转到对应店铺的全景漫游空间里,使得用户能够以第一人称视角,身临其境地观看店铺内部即周边实景,实现远程在线看铺能力,提升招商效率。如图1所示,假设此时用户查看的是a商场二楼的b1店铺,在点击店铺b1的二维图后,则会立即跳转到图中店铺的三维环境,用户会以图中人物的视角(即第一人称视角),来对店铺内的布置环境进行仔细观察,且还会获取到关
于与店铺相关的部分详细信息,例如图1中给出的店铺主要的服务群体为男性,店铺在周内的人流量大约为100~150人/day,在周末或者节假日的人流量为700~900人/day。
87.图2是根据本发明实施例的一种地图生成方法的流程图,如图2所示,该方法包括如下步骤:
88.步骤s202,以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息。
89.本步骤的目标场景一般为位于各大城市的核心地带商场,也不排除其他的特定场景;大型商场便于人们在工作之余,能够进行饮食或者进行购物活动。此类商场楼层一般为多层,层数的多少一般与城市的繁荣程度相关。每一层一般都会规划为同一类型的商品。
90.例如图3,以一个简单的四层楼商场示意图进行举例,一楼一般会为珠宝配饰以及潮流之类的物品,二楼为关于女性的物品,个性女装或者美妆饰品之类的。三楼为与儿童相关的物品,童装童鞋亦或者是提供早教服务的,四楼为一些可以体验休闲活动的场所,影城亦或者是密室。当然上述层数的具体类型根据商场的规划不同也会发生改变。当然本技术中的商场也包括几层楼专卖一种类型的商场,例如,某家居广场。
91.二维图也就是简单的平面图。目标场景原始二维图在此可以简单的理解为将要采集信息的商场内部环境的原始平面图,即商场的设计团队根据设计效果图以及cad平面图生成商场刚开始建造后的原始二维图。对于多楼层商场,针对每一层可以有一个原始二维图。例如,图4为a商场第二层的原始二维平面示意图。
92.在已有的目标场景原始二维图对应的目标场景中,选择点位动线。上述提到的已有的目标场景原始二维图对应的目标场景,为需要进行招商的商场的每一层环境。每一楼层包括多个店铺,以及商场的每一层之间会建造扶梯,便于人们在不同楼层之间进行购物或者消费。人们在每一层之间闲逛时,会有一个大概的移动方向,而将人在室内移动的点,连接起来的轨迹就成为动线。点位动线理解为人们在动线上选择的点位集合形成的包含若干点位的动线,即将人们在室内移动的轨迹上的点作为采集三维全景信息的采集点。人们在商场内的流动轨迹从扶梯下来后的行动轨迹如图5中的箭头所示。可以将点位动线的行进方向绘制在原始二维图中,形象的表达人们在商场某一层的流动轨迹,这样在后续为用户提供的全景地图里,能够让用户有一种自己仿佛亲自位于商场中的真实体验效果,使其体验与现场参观具有相互一致的效果,进一步提升真实感。
93.然而,由于人在移动时是连续的一条线(由一个个点位构成),如果基于此,将线上的点紧挨着来选择点位,难免会给拍摄工作增加额外的成本,况且商场内部的环境一般变动不是很大,因此,在本实施例中,对于点位动线中的各个点位,选择具有预定间隔的点位,作为三维信息全景采集点;例如,所述间隔的距离为3米,只要保证两个相邻点位之间的环境变动不会发生太大变化,采集到的两个相邻点位画面之间会存在一定的重合部分,使得采集到的商场内部环境信息完整。
94.三维全景信息一般是在采集点上设置专门的三维摄像设备,采用该设备对周围的场景进行360度摄像,获得商场过该楼层该点位观察的立体环境。具体获得的信息根据当前采集点的具体商场环境而确定,在此不再过多赘述。
95.在确定好商场内部环境中的三维全景信息采集点以后,基于各个所述三维全景信息采集点,在所述目标场景中采集对应每个采集点的三维全景信息将在各个采集点采集的三维全景信息,以及采集点的坐标信息,并对应存储为所述目标场景的三维全景信息。
96.作为上述根据点位动线,按照预定距离选择采集点的方式的补充,根据需要,拍摄人员也可以在确定好在商场内部环境中,选择一些特殊点作为三维全景信息采集点,以便弥补仅仅采用点位动线上的采集点造成的信息缺失问题。
97.例如,拍摄人员会选择每一层扶梯的出口处作为当前楼层的第一个三维全景信息采集点,采集当前点位的三维全景信息。然后,在环绕该楼层的环形的点位动线中,以三米的间隔选择一组点位作为采集点,进行三维全景信息的采集,在每一个采集点,都对当前点位的环境信息进行360度无死角的视频信息采集,甚至也可以同时采集音频信息。
98.在采集完毕后,将点位采集信息上传至商家管理平台时,为了便于在后期查看时,能够清楚采集的采集信息的点位的明确位置,会同时将当前采集信息的坐标点信息上传至商家管理平台。上述坐标点信息包括当前采集点位于商场中的具体楼层,以及采集点在楼层中具体的坐标位置。
99.如图6所示,拍摄人员正在采集位于2层b5店铺的三维全景信息,则在采集完2层b5店铺的信息进行上传时,同时上传(2,b5,1)的坐标信息给管理平台,此时管理平台就会知道此时采集到的信息是商场2层b5店铺第一个信息采集点的三维全景信息。在拍摄人员将采集到的商场环境内部的所有采集点的三维全景信息,以及每一采集点坐标点对应的坐标信息上传至商家管理平台后,商家管理平台将形成商场内部环境的三维全景信息进行存储。
100.上述例子只是为了便于理解,进行简单说明的一个例子。具体的商场每一楼层或者店铺内的点位选择,拍摄人员可以根据自己的经验以及所确定的点位动线,并根据预定的规则进行选择;除了上传采集点的坐标,也可以上传采集点的设置规则到管理平台,由管理平台换算确定具体三维全景信息采集点的位置。
101.步骤s204,基于所述三维全景信息,生成目标场景转化二维图。
102.由于前述采集三维全景信息过程中,只有目标场景的原始二维图,因此,只能以该原始二维图为依据,确定各个采集点坐标,并采集三维全景信息;由于原始二维图是根据原始设计图或者采用其他绘制方式绘制生成的,因此,其标注空间尺寸与现场实际空间尺寸存在明显差异,需要根据实际情况进行校正;由于已经采集了实际的三维全景信息,因此,可以利用实际的三维全景信息转换为目标场景的二维图,为了将该转换获得的二维图与原始二维图相互区分,将其称为目标场景转化二维图。
103.具体的,首先基于所述目标场景的三维全景信息中的各个采集点的坐标信息,以及对应各个采集点的三维全景信息,获取其中各个方向的点云信息。
104.商家管理平台在得到商场环境内部的整体三维图,以及整体三维图里每一个采集点所对应的坐标点信息以后,会自动生成一个商场三维环境的点云信息图。点云,是某个坐标系下的点的数据集,可以简单理解为一堆点,人类所生活的世界即是一个三维世界,那么点云中的每一个点都是三维点。在本技术中,点云信息可以简单的理解为整个商场的三维全景在三维空间中的(x,y,z)坐标,当然也包括颜色信息,光照强度,类别标签、法向量、灰度值等信息。本技术中的点云信息所构成的三维环境,能够将采集点周围的环境无差别还原,在观看采集点的三维全景信息时,给观看的人一种身临其境的感觉,更真实地对店铺以及店铺周围环境有体会。
105.在生成商场整体的点云信息后,获取所有不同方向的点云信息,也就是获取点云
图中的每个点形成的空间轮廓。根据该空间轮廓,利用智能识别技术,可以获得真实场景中的实际情况的二维图
106.在本领域中,技术人员普遍知道,二维图是三维图投影所得到的图形。因此,二维图与三维图之间存在着固定的对应关系。因此,在获取到三维点云信息(即三维点云图)后,对获取到的三维点云图,选择合适的高度,水平切片即可得到商场环境的转化二维图。切片是指三维图像中的一个切面对应的图像。切面可以是过图像内部一点且平行于xy、yz、xz平面的平面,也可以是任意的过三维图像内部一点任意方向的平面,本技术中的切片特指过图像内部一点且平行于xy平面的平面。为了使得使用者能够清晰的观察到商场的转化二维图,在选择水平切片的高度时,应以商场的三维点云图在(x,y,z)坐标系中的z的最大值h为界限。一旦高度值超过h时,此时得到的商场转化二维图不能全面反映商场环境,因此为了使得使用者观看到的商场转化二维图的全面信息,高度值的范围一般选择为0-h。利用三维全景信息转换后的商场环境二维图即为目标场景转化二维图,该二维图由于是从现场采集的三维全景信息图获得的,因此能够反映实际场景的情况。
107.为了便于能够在转换后二维图中轻易找到对应店铺的位置和范围,在转换后的商场环境的二维图中,一般会包括目标场景内的特征点。该特征点一般为商场环境内的具有标志性或者变动不大容易的位置,例如店铺的门、店铺里面的拐角位置、亦或者是店铺与店铺之间设置的界限位置。如图7所示,将店铺门作为特征点a类,将店铺的门窗支柱处作为特征点b类,将店铺的拐角作为特征点c类。由于上述位置环境的显著性,以及作为人们所关注的目标的界限的标识性,使其可以在后期用于环境位置的校准。为了后续便于与目标场景原始二维图中的特征点进行区分,在此将目标场景原始二维图中的特征点作为第一特征点,目标场景转化二维图中的特征点作为第二特征点。
108.步骤s206,建立所述目标场景原始二维图的坐标点与所述目标场景转化二维图的坐标点的第一对应关系。
109.由于目标场景原始二维图一般是根据设计图绘制的,或者,在刚刚建成时绘制,但是实际场景可能会有一些变化,使得实际情况与原来刚建造成时的环境有变化。因此,基于原始的商场环境二维图来进行招商,可能会造成和实际场景存在明显差别的情况。需要明确,目标场景原始二维图始终是呈现给招商对象的二维图,但是,对于可能租用商铺的具体商户而言,一定期望呈现在自己眼前的三维图是和现实情况完全吻合的三维图,这样,其通过远程方式看到的场景才具有意义。
110.因此,需要对商场内部的二维图进行更新,将商场环境的各种变化后的实际情况,在通过目标场景原始二维图跳转到三维图时,能够完全对应到其期望获得的实际观察位置的实际三维图。为此,在获取到最新根据三维全景信息转换而得到的目标场景(商场)转换二维图后,需要利用所述目标场景转换二维图,对目标场景原始二维图进行偏移校准。
111.在进行校准之前,需要先建立目标场景原始二维图与目标场景转化二维图的对应关系,并且将其作为第一对应关系。本技术中给出两种建立第一对应关系的方式。如下进行详细说明。
112.方式一:在所述目标场景原始二维图中,选择其中所记录的所述目标场景内的第一特征点;依据所述第一特征点的特征,在所述目标场景转化二维图中,找出对应的第二特征点;根据上述步骤确定的第一特征点,以及第二特征点之间的相互对应的性质,确定所述
第一对应关系。
113.例如,在目标场景的原始二维图中,寻找到商场层与层之间的扶梯、店铺外面过道、店铺内的浏览过道、亦或者是店铺内支撑的柱子,将上述描述位置作为第一特征点。此类第一特征点的位置不会发生太大的改变,且对于目标对象的界限具有较好的标识性,以这些点作为特征点来对变化位置进行纠正,准确性较高。具体的,可以在原始二维图中,将整个商城环境出现的第一特征点的位置以及相互邻接的关系等特征标记出来,随即在转化后的目标场景二维图里,根据上述第一特征点所具有的特征,确定其在转化后的商场二维图(可以理解为代表实际场景)里的具体位置。
114.由于确定出的第一特征点和第二特征点的特征基本相同,但是第一特征点特征点在原始二维图的坐标系中的坐标位置,与第二特征点在转化后的二维图里的坐标位置会有所区别。因此,基于第一特征点与第二特征点之间的相互对应的性质,可以确定第一特征点在原始二维图的第一坐标,然后再确定出第二特征点在转化后的二维图里的第二坐标。然后基于第一坐标与第二坐标,来建立商场原始二维图与商场转换后的二维图之间的第一关系,该第一对应关系即:坐标系映射矩阵。简而言之,由于坐标系映射矩阵为现有技术,因此在此简单说明:矩阵表示坐标系的映射关系,坐标系映射关系的本质又是矩阵乘法。
115.为了便于理解,在此选择一个坐标点进行简单说明。如图8所示,选择店铺a1中的柱子作为特征点,其在原始二维图中的坐标位置可能为(2,6),其在转化后的二维图中的坐标位置可能为(2,8)。此时,可以清楚明白的是两个坐标都表示的是该位置的某个柱子这一特征点,只是在不同的二维图中,其坐标点具有不同的实际位置,但和其他特征点的邻接关系并没有改变。进而根据柱子在不同二维图中的坐标位置,建立(2,6)—转为(2,8)的坐标对应关系。
116.商场内其他特征点的坐标对应关系的建立过程,与上述柱子特征点的坐标对应关系的建立过程基本相同,在此不再过多赘述。将商场内部所有特征点建立的坐标对应关系,所形成的集合,即可以得到整个商场在原始二维图环境中的坐标,与整个商场在转化后的二维图环境中的坐标形成的对应关系。
117.方式二:在所述目标场景转化二维图中,选择其中所记录的所述目标场景内的第二特征点;依据所述第二特征点的特征,在所述目标场景原始二维图中,选择对应的第一特征点;根据上述步骤确定的所述第二特征点,以及所述第一特征点之间的相互对应的性质,确定所述第一对应关系。,
118.上述确定目标场景原始二维图的坐标点与目标场景转化二维图的坐标点的第一对应关系的过程基本与方式一的确定过程相同。只不过本方式中是先在目标场景转化二维图中来确定第二特征点。进而根据第二特征点的特征在目标场景的原始二维图中寻找对应的第一特征点,然后建立目标场景原始二维图的坐标点与目标转化场景二维图之间的坐标点的第一对应关系的过程,与方式一中相同。因此,在此不再过多赘述。
119.换言之,上述两种不同的方式建立了原始场景二维图的坐标点与目标场景二维图坐标点之间的第一对应关系(即坐标系映射矩阵)。即可以根据坐标系映射矩阵,实现从原始场景二维图坐标系到目标场景转化二维图坐标系的转换。此时,根据矩阵之间的转换关系,上述的坐标系映射矩阵的逆矩阵,即可实现目标场景转化二维图坐标系到目标场景原始二维图坐标系之间的转换。
120.步骤s208,基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系。
121.在确认得到目标场景转化的二维图与目标场景原始二维图的第一对应关系后,便可清楚的对原始二维图中发生变化的坐标点的位置进行偏移校正,相当于对原始二维图加入偏移量信息,以便在指定原始二维图的某个具体坐标点的时候,找到使用者实际期望在真实场景中获得的坐标点,以更进一步获取三维全景信息时的坐标点。
122.为了更形象的说明情况,以下站在电子地图的使用者视角描述上述第二对应关系的意义。
123.对于地图使用者而言,呈现给使用者的为原始二维图,根据该二维图,使用者点选了店铺a1前面的一个坐标点,则其实际是想看店铺a1的三维全景视图,但是,如果直接使用原始二维图中的坐标为采集点坐标去找三维全景图,则可能获得的是店铺a8位置的三维全景视图,而通过偏移校正后,将原始二维图中的店铺a1前面的坐标点,根据所述第一对应关系,转移到了与所述目标场景转化二维图中的位于店铺a1位置的坐标点,再根据该坐标点确定与客户实际想要看的场景最近的采集所述三维全景信息时的位置点;通过上述方式直接建立的目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点的对应关系,称为第二对应关系。
124.通过上述步骤,相当于建立了原始二维图-转化后的二维图-真实场景(实际呈现的是三维全景信息)的联通渠道。或者说,建立了对目标场景原始二维图中的坐标点与采集点三维全景信息时的位置点的对应关系。
125.基于上述对应关系,采集点所对应的全景信息与其在原始二维图中的位置绑定,如图9所示,商场三维全景图中的三维全景采集信息点a1,与目标场景原始二维图中的a1所对应。目标场景原始二维图的使用者在查看原始二维地图时,点击a1(2,6)处,就可以即跳转到目标场景转化二维图中的a1(2,8)所对应的三维全景,给使用者带来a1点的三维全景信息的展示。
126.在本步骤,所述目标场景原始二维图与采集所述三维全景信息时的位置点建立的第二对应关系,可以和上述第一对应关系完全相同,例如,前面建立的目标场景原始二维图中的坐标(2,6)可以转为目标场景转换二维图(2,8)的坐标对应关系;将(2,6)校正为目标场景转换二维图(2,8)后,即进行了偏移校正后,进一步的,通过目标场景转换二维图中的坐标(2,8),可以确定采集所述三维全景信息时的位置点,该位置点可以采用两种方式确定:
127.方式一:在沿着动线设点采集三维全景信息时,对应记录了采集时的位置,这些位置点已经比较密集了,可以将这些位置点采集的三维全景信息代表其附近点的三维全景信息,也就是以近似的方式提供非采集点的三维全景信息;此时,本步骤实际是在对目标场景原始二维图的坐标点进行偏移校正之后,在目标场景转换二维图中寻找与该校正后的目标场景转换二维图中的坐标点最近的采集所述三维全景信息的位置点。
128.方式二:在沿着动线设点采集三维全景信息时,对应记录了采集时的位置,这些位置点已经比较密集了,并保证了采集到的三维全景信息具有相互重叠的冗余,因此,可以将这些三维全景信息进行融合,最终,在任何一个目标场景转换二维图中的坐标点,都可以获
得以这个点为视角的三维全景信息;则将目标场景原始二维图中的坐标校正为目标场景转换二维图中的坐标后,可以直接使用该坐标点视角的三维全景信息,也就是说,直接将与目标场景原始二维图对应的目标场景转换二维图中的点的作为采集三维全景信息时的位置点。
129.当然,以上都是假定所述位置点是以所述目标场景转换二维图中的坐标点表示该位置点;但实际上,在所获得的三维全景信息中,还可以有一个三维形式的坐标点,所述位置点完全也可以采用这种表达方式;当然,两种方式在本技术期望达成的效果下,并不本质区别。
130.步骤s210,根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi点的全景信息。
131.在确定更新后的目标场景的原始二维图与采集三维全景信息时的位置点的第二关系后,就可以将真实场景的三维信息,对应原始二维图中的坐标点存储;当然,并非每一个点都需要存储三维信息,在一个二维图中,只有一些重要的位置点属于可能的poi点,会引起使用者进一步了解的兴趣,因此,需要预设poi点,并根据上述第二对应关系,对应上述poi点,存储合适的三维全景信息。poi(一般作为point of interest的缩写,也有point of information的说法),通常称作兴趣点,泛指互联网电子地图中的点类数据,基本包含名称、地址、坐标、类别四个属性;源于基础测绘成果dlg(digital line graphic,数字线划地图)产品中点类地图要素矢量数据集;在gis(geographic information system,地理信息系统)中指可以抽象成点进行管理、分析和计算的对象。
132.实际上,本步骤就是将合适的三维全景信息与目标场景中的原始二维图的坐标点进行绑定,所谓坐标点,也可以是指店铺等明确的位置;可以理解为在原始二维图中,某个店铺相关的所有坐标点都会转化为一个标准的代表该店铺的坐标点,再以该坐标点转换的真实场景中采集点位置,获得相应的三维全景信息。
133.具体而言,如图10所示,本步骤可以采用如下具体步骤实现:
134.步骤s210-1,基于目标场景原始二维图的坐标点,确定所述预设poi点。
135.该步骤可以通过在目标场景原始二维图的界面中,接收触屏选择,获得设计者希望作为poi点的坐标点。
136.步骤s210-2,根据所述预设poi点在目标场景原始二维图中的坐标,根据所述第二对应关系,获得采集三维场景原始二维图时的与所述poi点关联的位置点。
137.由于前面步骤已经获得了第二对应关系,则根据所述预设poi点在目标场景原始二维图中的坐标,依据该第二对应关系,就可以获得对应于所述poi点的采集三维全景信息的位置点,如前所述,该位置点可以表现为某个采集三维全景信息的实际位置点,也可以就是poi点在目标场景转化二维图中的对应点。
138.步骤s210-3,将所述位置点采集的三维全景信息,作为所述预设poi点的三维全景信息;或者,根据与所述poi点关联的位置点相对于所述poi点在目标场景转化二维图中对应点的位置关系,结合其他位置点获得的三维全景信息,进行偏移校正后的三维全景信息作为所述poi点的三维全景信息。
139.在该步骤中,如果所述位置点是经过近似处理的实际的三维图像全景信息的采集
位置,则可以将该三维全景信息直接作为对应预设poi点的三维全景信息;如果所述位置点为精确的转换点,则将该位置点对应的经过数据融合处理的三维全景信息作为所述poi点的三维全景信息。
140.这样便可在商场原始二维图中,对应预设的poi点准确存储相应的的三维全景信息,以使得目标场景原始二维图的使用者能够选择并准确查阅各个poi点的全景信息。
141.所述poi点至少包括目标场景中的店铺,即商场中需要进行招租的店铺。除此之外,poi点还可以包括店铺中的商品,货架、人员。所述对应预设的poi点的三维全景信息,包括目标场景中的店铺的三维全景信息,即商场中的店铺周围的立体环境。为了使用户更加的了解店铺中的信息,在对应预设的poi点在所述目标场景中的位置,进一步存储与该poi点所在目标场景中的位置相关的推广信息。。即给出该店铺适合售卖什么东西,人流量在什么时候段最多,或者说购买商品的群体是儿童、或者是男性、女性。诸如此类的广告信息。这些poi点可以是二级方式设置的,即,通过最初的目标场景原始二维图的预设poi点,找到目标场景中的三维全景信息,在三维全景信息中进一步设置可供选择的poi点,这些poi点结合三维全景信息中展示的信息进一步展示,因此,可以具有更丰富的展示内容,可以结合商品推销设置poi点,这样,从原始二维图可以一步步获得商品推销信息,从而使原始二维图成为商品推销的导图。
142.本技术还提供一种地图展示方法,请参看图11。
143.步骤s302,根据用户针对目标场景原始二维图的触发操作,确定其选择的poi点。
144.所述用户为目标场景原始二维图的使用者。在不同的场景下,使用者的对象不同。如果是在商场内部,可能是商场的工作人员,其作为目标场景原始二维图的使用者,向远程客户介绍商场内部情况。如果是是用户进行商品展示,则可以为用户的工作人员,poi点已经在上述进行过详细解释,在此不再过多赘述。
145.触发操作一般为单击,在用户针对目标场景原始二维图中poi点的进行触发操作后,即用户在单击目标场景原始二维图中的poi点时,立即建立其目标场景原始二维图中的poi点基于目标场景三维全景信息中的poi点对应关系。
146.步骤s304,根据所选择poi点,读取对应该poi点存储的三维全景信息。
147.根据本技术第一实施例提供的地图生成方法,已经以目标场景的原始二维图为基础,在其中各个poi点存储了以该poi点为视角的三维全景信息,并且,该poi点存储的三维全景信息的实际采集点,已经根据现场采集信息做了调整,使客户通过所述原始二维图选择的poi点,存储了客户期望获得的视角;例如,对于原始二维图的坐标点a1(2,6),并没有存储在现实场景中a1(2,6)获得的三维全景信息,而是存储了a1(2,8)的三维全景信息,在本步骤读取的也是a1(2,8)点的三维全景信息;因为根据特征点等信息,可以判断,在原始二维图中选择坐标点a1(2,6)的目的,是想考察店铺a1,而实际场景中的a1(2,6)点采集的三维全景信息更多的反映店铺a8;而实际场景中的a1(2,8)则反映了店铺a1的情况,因此,将实际场景中a1(2,8)的三维全景信息存储在原始二维图的坐标点a1(2,6)位置。
148.步骤s306,展示所述poi点的三维全景信息。
149.由于前面步骤s304已经读取了对应该poi点存储的三维全景信息,因此,在本步骤只要根据该三维全景信息在界面进行展示即可;所述展示的具体方式,可以采用各种方案,包括在所述原始二维图表面浮动显示三维全景信息;另外,可以在三维全景信息中进一步
提供一些标识出的poi点,供用户点击,并在用户点击触发后展示进一步的信息,这些信息包括商品信息,店铺的介绍等等客户可能感兴趣的话题。
150.图12是根据本发明实施例的一种地图生成装置1100的结构图。
151.所述装置包括以下单元:
152.采集单元1110,用于以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;
153.生成单元1120,用于基于所述三维全景信息,生成目标场景转化二维图;
154.第一建立单元1130,用于建立所述目标场景原始二维图与所述目标场景转化二维图的坐标点对应关系,该对应关系作为第一对应关系;
155.第二建立单元1140,基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系;
156.存储单元1150,用于根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi点的全景信息。
157.本发明实施例还提供了一种终端设备,包括:存储器、处理器。
158.所述存储器,用于存储程序,所述程序在被所述处理器读取执行时,执行如下操作:
159.以已有的目标场景原始二维图为依据,采集目标场景的三维全景信息;
160.基于所述三维全景信息,生成目标场景转化二维图;
161.建立所述目标场景原始二维图与所述目标场景转化二维图的坐标点对应关系,该对应关系作为第一对应关系;
162.基于所述第一对应关系,对所述目标场景原始二维图的坐标点进行偏移校正,使目标场景原始二维图的坐标点与采集所述三维全景信息时的位置点建立第二对应关系;
163.根据所述第二对应关系,在所述目标场景原始二维图中,存储对应预设的poi点的三维全景信息,以使得目标场景原始二维图的使用者能够选择并查阅各个所述poi点的全景信息。
164.本技术还公开一种地图展示装置,请参考图13。
165.操作单元3010,用于根据用户针对目标场景原始二维图的触发操作,获取其选择的poi点;
166.读取单元3020,用于根据所选择poi点,读取对应该兴趣点存储的三维全景信息;
167.展示单元3030,用于展示poi点的全景信息。
168.本技术还公开一种电子设备,如下:
169.处理器;
170.存储器,用于存储程序,所述程序在被所述处理器读取执行时,执行如下操作:
171.根据用户针对目标场景原始二维图的触发操作,确定其选择的poi点;
172.根据所选择poi点,读取对应该poi点存储的三维全景信息;
173.展示所述poi点的三维全景信息。
174.在上述详细说明中,实施例已参照许多具体细节进行了描述,这些细节可能因实
施而异。可以对所述实施例进行某些适配和修改。对于本领域的技术人员,可以从本发明公开的具体实施方式中,显而易见的获得其它一些实施方式。本说明书和示例仅出于示例性的目的,本发明的真实范围和本质由权利要求说明。示图所示的步骤顺序也仅出于解释说明的目的,并不意味着限定于任何特定的步骤、顺序。因此,那些精通本领域的技术人员会意识到,在实施相同的方法时,这些步骤可以以不同的顺序执行。
175.本技术虽然以较佳实施例公开如上,但其并不是用来限定本技术,任何本领域技术人员在不脱离本技术的精神和范围内,都可以做出可能的变动和修改,因此本技术的保护范围应当以本技术权利要求所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1