一种评估育种田间小区样地质量的方法和系统
1.本发明涉及土地评估技术领域,更具体地,涉及一种评估育种田间小区样地质量的方法和系统。
背景技术:
2.在农作物品种选育过程中,有一个重要环节,即设计田间实验,将不同品种的种子种植到田间的不同小区样地中,监测每个小区样地中的农作物在整个生长季的生长动态,并在生长季结束后测量其产量,进而筛选出最能满足要求的品种。在此过程中,小区样地的质量尤为重要。高质量的小区样地通常是指小区样地内种植的所有种子都顺利发芽,在整个生长季中没有受到外界或人为的破坏,每一行内没有明显的空缺,没有杂草的侵扰,小区样地内的农作物长势均衡,没有明显的长势差异,即有的长势旺盛,有的长得很小。然而,由于小区样地内的土壤不均、鸟和杂草的侵扰、缺水、缺肥等诸多原因,不少样地在不同生长阶段出现了不同程度的破坏,导致最后的产量降低。因此,非常有必要将这些质量低的样地在测量产量和评估种子品种的时候剔除掉,否则将会极大地影响品种评估,例如,某个品种的产量低或者不满足选育要求,并不是因为品种本身的问题,而是由于小区样地的质量低造成的。
3.目前通常采用的方式是在农作物不同的生育期,育种专家亲自到田间通过目视的方式,随机选一些小区样地,评估其受损情况,并根据经验给每个小区样地挨个打分,作为后续评估品种的基础。然而,这种人为目视判断的方式存在以下两个问题。
4.1)大型育种公司的田间实验常会设计很多小区样地(如大于1000个),人为目视判断的方式难以观察到所有的样地,特别是需要在整个生长季内多次观察,需要耗费大量的人力和精力。
5.2)人为目视判断的方式很主观且观测角度不同,无法定量且标准化,取决于专家的经验,不同专家可能对同一小区样地有不同的判断,造成最终评估品种时的差异和不统一。
6.3)目前尚无覆盖整个生长季的多次观测,实现对小区样地质量自动评估的定量标准和方法。
技术实现要素:
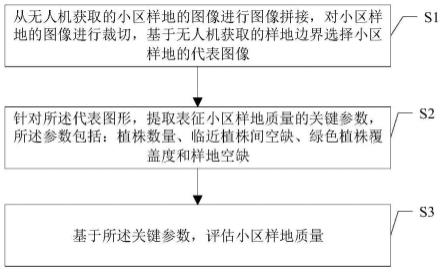
7.针对背景技术中的问题,本发明提出一种评估育种田间小区样地质量的方法,包括:s1,从无人机获取的小区样地的图像进行图像拼接,对小区样地的图像进行裁切,基于无人机获取的样地边界选择小区样地的代表图像;s2,针对所述代表图形,提取表征小区样地质量的关键参数,所述参数包括:植株数量、临近植株间空缺、绿色植株覆盖度和样地空缺;s3,基于所述关键参数,评估小区样地质量。
8.本发明提出一种可以定量评估田间所有育种小区样地的方法,通过无人机飞行采集高分辨率图像,将育种专家的经验转化为定量化、标准化的分数,为品种选育提供标准的
参考。
9.本发明还对应提出一种评估育种田间小区样地质量的系统,包括处理器,所述处理器运行时实现如前所述的方法。
10.本发明的方法的有益效果包括:
11.1)从无人机获取的小区样地的高分辨率图像中提取关键参数,建立与样地质量的模型关系,将专家经验转化为可定量表达的分数,可以覆盖所有小区样地,降低了不同专家主观判断的误差,大大提高了品种选育的效率。
12.2)不同于从正射影像中裁切小区样地图像,本发明从无人机采集的多角度原始高分辨率图像中选取最佳的一张图像,保障了图像的原始分辨率和清晰度。
13.3)在农作物不同生长阶段,计算不同的关键参数,避免了单一参数可能造成的误差。
附图说明
14.为了更容易理解本发明,将通过参照附图中示出的具体实施方式更详细地描述本发明。这些附图只描绘了本发明的典型实施方式,不应认为对本发明保护范围的限制。
15.图1为本发明方法的一个实施例的流程图。
16.图2为本发明方法的另一个实施例的流程图。
17.图3为同一样地的多角度高分辨率图像以及筛选出的最佳高分辨率图像的示意图。
18.图4为旋转图像并计算植株间空缺的高分辨率图像示意图。
19.图5为小区样地植株空缺的示意图。
具体实施方式
20.下面参照附图描述本发明的实施方式,以便于本领域的技术人员可以更好的理解本发明并能予以实施,但所列举的实施例不作为本发明的限定,在不冲突的情况下,下述的实施例及实施例中的技术特征可以相互组合,其中相同的部件用相同的附图标记表示。
21.如图1-2所示,本发明的方法包括s1-s3。
22.s1,提取小区样地最佳高分辨率图像。
23.s11,使用无人机搭载高分辨率高分辨率相机,进行育种田块的飞行,获得高分辨率图像,以及样地边界信息。从原始的无人机飞行中,获取以下飞行信息:连续飞行次数、图像采集的gps信息(经度、纬度、高度和时间)、地面控制点信息(每个控制点的经度、纬度和海拔高度)。同时,需要获取育种田块中的小区样地边界分布图,即每个小区样地的边界(通常表达为左上角、右上角、左下角、右下角的经度和纬度)以及小区样地的名称。另外,需要获取田块中农作物种植的基本规律信息,包括行间距和株距,这些信息通常来源于种植专家或者育种专家。
24.s12,对s11获取的所有图像进行拼接生成三维点云。目前有多款商业或者开源软件可以实现图像的拼接及三维点云重建,其中agisoft metashape最为成熟、稳定,且提供了可进行自定义二次开发的api接口,方便调用。在一个实施方式中,选择使用商业软件agisoft metashape的api接口,输入s11步骤获得的高分辨率图像,基于运动结构恢复技术
(structure from motion,sfm)实现三维重建,并输入s11中获取的地面控制点信息,手动或者基于深度学习技术自动读取,进行几何配准,生成育种田块的三维点云以及高分辨率的正射影像。
25.s13,根据s12生成的三维点云以及s11中每个小区样地的边界地理坐标,找出覆盖每个小区样地的原始高分辨率图像,并基于小区样地的边界信息,在原始图像上进行裁切,获取每个小区样地的多个角度的高分辨率图像。
26.s14,挑选覆盖每个样地的一张代表高分辨率图像。
27.如图3所示的同一样地的多角度高分辨率图像以及筛选出的最佳高分辨率图像。对于每个小区样地而言,有多幅图像覆盖,然而由于观测角度、相机视场角的影响,这些图像存在着诸多问题:如样地覆盖不完整,观测角度过于倾斜等。因此,需要从诸多图像中选择出最适宜的一张图像,作为后续分析的基础。优选地,这张最佳图像需要满足的条件包括:1)清晰,如使用拉普拉斯算子评估图像的清晰程度,若拉普拉斯算子的值在0.1之内则认为图像是清晰的;2)无人机相机的观测天顶角范围在15
°
内;3)覆盖样地的有效像元数量占到图像总像元数量的95%以上。
28.这一步骤中,通常的做法是基于s12生成的星下点正射影像,直接使用小区样地边界进行裁切,得到每个样地的高分辨率图像。这种做法存在着以下风险:1)从三维点云生成的正射影像是从多角度高分辨率原始图像融合而成的,有时会存在一定程度的模糊,这会直接导致裁切后的样地高分辨率图像也会有模糊,极大地影响后续的计算;2)正射影像的分辨率基于无人机数据处理过程中的点云分辨率,有时为了无人机数据处理的效率,会牺牲部分分辨率,因此生成的正射影像的分辨率要比实际的原始高分辨率粗,也会影响后续的计算。
29.本发明提出的方法是从原始高分辨率图像中选择最佳的一张,不仅可以去除模糊的图像,也可以保证图像的分辨率。
30.s2,提取表征小区样地质量的关键参数。
31.小区样地质量的定量评估是基于诸多参数实现的,根据农作物的生长季使用不同的关键参数来进行质量评估。
32.s21,获得样地内的植株的数量和邻近植株之间的空隙。在农作物生长早期出苗后,每一株植株可以清楚地识别,而邻近的植株之间并无覆盖遮挡,邻近样地之间也没有遮挡覆盖,此时用于衡量样地质量的关键参数是样地内的植株的数量和邻近植株之间的空隙。具体地,步骤s21包括1)-6)。
33.1)识别计算每个样地中的植株数量。在生长季开始前,基于往年或者其他途径获取的农作物早期小区样地高分辨率图像,选取大量具有代表性的数据,如超过1000张不同天气条件、不同分辨率等的样地高分辨率图像,使用标注工具将每一株苗都标注出来。目前有多种标注工具可选,优先选择labelstudio在线标注工具,主要是因为它简单易用,且提供api接口便于二次开发。
34.2)将所有标注的数据作为训练数据集,使用网络模型进行训练,生成单株植株的深度学习网络。在诸多深度学习网络中,优选faster r-cnn深度网络进行训练,相较于r-cnn网络和fast r-cnn网络,该网络具有更好的性能,能捕捉到更多的目标特征信息。训练时,将其中70%的图像作为训练数据集,剩余30%图像作为验证数据集,用于评价训练模型
的精度。
35.3)将训练好的模型应用到实际飞行获得的农作物小区样地高分辨率图像中,预测得到每一个植株并标注其在图像中的位置,即植株中心像元的位置,用(x0i,y0i)表达,其中i代表的是i棵植株(i=0,1,2,3
……
),如图4中的(a)所示。
36.4)根据步骤3)获得的每一株植株,将图像二值化,即深度学习预测框内的植株显示为1,其余部分显示为0。在二值图像中,选择出植株所在的行,按照行所在位置进行旋转,将行旋转至水平,同时计算旋转后每个植株中心像元的位置(x0i,y0i),其中i代表的是i棵植株(i=0,1,2,3
……
),如图4中的(b)所示。
37.5)在旋转后的小区样地高分辨率图像中,计算每行相邻植株间的几何距离d,即
38.根据s11获取的农作物种植时的标准株距设定一个阈值,若实际测量的几何距离d超过该阈值,则判断这两株植株间存在空缺。该阈值通常来自于专家经验,例如是标准株距的1.5倍,应当在播种前设定好,且该阈值会随着农作物类型、种植方式的差异而变化,如图4中的(c)所示。
39.s22,提取绿色植株覆盖度参数。
40.在农作物生长中期及后期,植株之间彼此覆盖遮挡,难以提取单株作物,此时用于衡量样地质量的关键参数是样地内农作物的绿色植株覆盖度、绿色植株在样地内的空间分布异质性以及样地内非植株的空缺。
41.1)从历史飞行数据中采集大量农作物的小区样地高分辨率图像,使用标注软件将其中的植株绿色部分和非绿色部分挑选出来。目前已有诸多可以标注的商业或开源软件,优选labelstudio开源在线软件进行图像分割,也就是手动选择图像中所有属于植株的绿色像元,标注为“植株绿色像元”。值得注意的是,这里的绿色像元不包含绿色的杂草,仅包括绿色的植株。
42.2)以所有标注好的数据集作为训练数据集,使用机器学习网络进行图像分割。目前有很多不同的图像分割机器学习网络,例如随机森林、支持向量机、深度学习等。优选u-net深度学习网络进行训练和预测,主要原因是该学习网络不仅可以读取图像中绿色或者非绿色的像元,同时读取图像的结构、纹理等多种信息,建立多层深度网络,更有助于模型的训练和预测。与s21中类似,将所有做标注的图像分为两部分,70%的图像作为训练数据集,输入深度学习网络中进行训练,其余30%的图像用于检测模型训练的精度。
43.3)将训练好的模型应用到所有实际的小区样地高分辨率图像中进行绿色植株部分的预测,每个小区样地生成一个二值图像,其中1代表绿色植株,0代表其他(包括土壤背景或者杂草等)。计算所有绿色像元的总数量green_pixel,以及整个图像的像元数量,即图像的行数row乘以列数column,以二者间的比值计算绿色植株覆盖度fcover。
[0044][0045]
4),读取s11输入的小区样地的标准行间距,将3)得到的小区样地的二值化图像中的非绿色部分,即像元值为0的部分,以圆圈填充,圆圈的半径为s11读取的小区样地的标准行间距。填充完成后,计算所有圆圈的面积(图5d中蓝色部分area
blue_circles
),也就是空缺的
面积占包括所有绿色植株的区域面积(图5c中蓝色部分area
all
)的比例(图5)。fhole越大代表小区样地的空缺越多。值得注意的是,并没有使用整个图像的总像元数作为分母,目的是避免将样地边界处的裸土作为空缺。这里仅考虑绿色植株覆盖范围内的空缺。
[0046][0047]
s23,将如上生成的每个小区样地的关键参数进行汇总,即一个小区样地对应一组参数。
[0048]
1)若是生长初期可以数出单株的苗数,参数列表包括了样地内的植株数量、是否有空缺(是或否)、植株空缺的尺寸(若有空缺,为累计空缺尺寸,单位为厘米;若无空缺,为0)、绿色植株的覆盖度;
[0049]
2)若是生长中后期植株间互相遮挡覆盖,参数列表包括了绿色植株的覆盖度fcover、样地内的空缺fhole。
[0050]
s3,评估小区样地质量。根据农作物的生长季,同样将小区样地质量的评估分为了不同阶段。在不同生长阶段的算法思路相同,即将s2中获取的参数定量化为样地质量的不同分数。步骤s3包括s31-s33。
[0051]
s31,使用大量uav获取的同一农作物不同生长季的小区样地高分辨率图像,由多位育种专家同时对每个样地进行打分。为保证训练数据集的样本量,选择大量图像(例如1000张左右)。为了保证打分的公平性,选择三位专家对这1000张图像进行打分(对每种作物分数类别可能不同),若专家打分十分不一致,则单独挑出来进行讨论,最终得到训练数据集中样地的得分情况。
[0052]
s32,基于s2的步骤,根据图像所处的生长阶段,对这1000张图像进行处理,计算出相应的关键参数,将每张小区样地图像的多个参数与专家打分对应建立表格,生成训练数据集。以所有图像的多个参数为输入,以对应的专家打分为输出,使用机器学习模型进行训练。优选xgboost机器学习模型进行训练,选择其中基于树的模型。选择xgboost模型主要是因为它是梯度增强算法在表数据中性能最好的模型。
[0053]
s33,在实际应用中,将s32训练好的模型应用到每个样地,即输入s24生成地表格中的每个样地的关键参数,输出样地的分数。
[0054]
本发明还一种评估育种田间小区样地质量的系统,包括处理器,所述处理器运行时实现如前所述的方法。
[0055]
以上所述的实施例,只是本发明较优选的具体实施方式,本说明书使用词组“在一种实施例中”、“在另一个实施例中”、“在又一实施例中”或“在其他实施例中”,其均可指代根据本公开的相同或不同实施例中的一个或多个。本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1