一种考虑惯性效应的多状态退化系统可靠性建模方法
1.本发明涉及多状态退化系统领域,具体是一种考虑惯性效应的多状态退化系统可靠性建模方法。
背景技术:
2.工程实际中的许多部件在执行任务过程中,会呈现出多个输出状态或性能水平,这类部件统称为多状态部件。对应地,由多状态部件组成的系统称为多状态系统。因此,由单部件组成的多状态系统是多状态系统中最简单的一类情形,在工程实际中有非常多的支撑案例。
3.多状态系统的可靠性定义为系统在运行期间维持可接受状态的能力。对多状态系统可靠性的研究始于20世纪70年代,并逐渐形成了四种主要的可靠性评估与优化方法,即布尔模型扩展,随机过程理论,通用生成函数技术和monte-carlo仿真。
4.上述四种方法中,由于随机过程理论具有动态描述系统输出性能和对应状态概率的优势,因此随机过程在多状态系统可靠性分析中的应用最为广泛。在很多实际的案例中, markov过程被大量地应用于描述多状态系统的状态演化。更进一步地说,当系统遭受的外部冲击数以泊松过程到达时,相邻状态间的时间间隔服从指数分布,此时用markov 过程描述状态演化;当至少两个相邻状态间的时间间隔不服从指数分布时,通常用半 markov过程进行描述。另外,基于markov过程和半markov过程对连续时间离散状态的随机过程进行改进也常常用于多状态系统的可靠性建模中。
5.对于呈现出多于两个输出状态的可修多部件系统,当输出性能小于系统需求但大于 0时,失效往往不会立即发生。例如某个城市的供水系统,输出流量为从0到100吨每秒,需求为40吨每秒。当输出流量在很短的时间间隔内小于40吨每秒时,由于输送管道里原有的水流可以覆盖部分需求,城市供水系统往往不会立即发生失效。在物理学中,惯性是物体的一种固有属性,表现为物体对其运动状态变化的一种阻抗程度。
技术实现要素:
6.发明目的:提供一种考虑惯性效应的多状态退化系统可靠性建模方法,将劣化输出性能的惯性效应考虑进多状态系统的可靠性建模中,对每个劣化输出性能状态设置关键性阈值来测度其对系统可靠性的影响程度。
7.技术内容:一种考虑惯性效应的多状态退化系统可靠性建模方法,包括如下步骤:
8.步骤一、将多状态退化系统的输出性能依据可接受的满意度水平划分成三类状态子集,分别为可接受的状态子集,劣化状态子集和彻底失效状态子集;
9.步骤二、不考虑多状态退化系统的惯性效应,用连续时间的markov链表示多状态退化系统的状态转移变化,并求解多状态退化系统的可靠性指标;
10.步骤三、用一般性的随机过程表示考虑惯性效应后的多状态退化系统的状态转移变化,并求解考虑惯性效应后的多状态退化系统的可靠性指标。
11.进一步的,述步骤一的具体内容如下:
12.假设多状态退化系统具有n个不同的输出性能水平,输出性能满足 g(t)∈{g1(t),g2(t),
…
,gn(t)},其中,g(t)为输出性能向量;gi(t)表示第i个输出性能, i=1,2,l,n;n为输出性能的总个数,且第n个输出性能为彻底失效状态;
13.将性能状态空间n划分为三类:
14.1)可接受的状态子集
15.2)劣化状态子集g
θ
={s+1,s+2,
…
,n-1};
16.3)彻底失效状态子集g
χ
={n};
17.其中,s为可接受的状态子集与劣化状态子集的临界状态,记为 s=inf{s:gs(t)≥w(t)>g
s+1
(t)},其中,w(t)为多状态退化系统可接受的满意度水平。
18.进一步的,述步骤二中:
19.将未考虑惯性效应的多状态退化系统,记为原始系统;用随机过程{x(t),t≥0}来表示原始多状态部件的状态演变过程,当失效率λ
12
,λ
13
,
…
,λ
1n
和修复率μ是常数,即任意两状态间的时间间隔为指数分布时,{x(t),t≥0}为具有状态空间e={1,2,
…
,n}的连续时间markov链;
20.原始系统的可靠性指标的求解过程如下:
21.用pj(t)=p{x(t)=j}表示原始系统{x(t),t≥0}处于状态j(j∈e)的概率;在初始条件p1(0)=1,p2(0)=0,
…
,pn(0)=0下,根据kolmogorov定理,可通过求解如下的方程组得到pj(t)的值:
[0022][0023]
原始系统{x(t),t≥0}的可用度水平为:
[0024][0025]
其中,a(t)表示可用度,表示任一时刻t原始系统处在正常状态的概率。
[0026]
进一步的,所述步骤三中:
[0027]
将考虑率惯性性效应后的多状态退化系统,记为新系统;给每个劣化输出性能状态 s+1,s+2,
…
,n-1设置关键性阈值τ1,τ2,
…
,τ
n-s-1
,关键性阈值满足τ1>τ2>
…
>τ
n-s-1
>0;将新系统在状态k(k=s+1,s+2,
…
,n-1)的停留时间记为tk;当tk<τ
k-s
满足时,由于惯性效应的存在,新系统失效在极短时间内可以忽略;用随机过程来表示考虑惯性效应后的新多状态部件的状态演变过程;
[0028]
新系统的可靠性指标求解过程如下:
[0029]
1)关键性阈值都是常数
[0030]
用表示原始系统处于劣化状态j(j=s+1,s+2,
…
,n-1)且新系统在时间t时运行的概率,的求解过程如下:
[0031][0032]
其中,pi→j(i<j)表示多状态部件在跳跃入状态j前处于状态i(i=1,2,
…
,s)的概率,且
[0033][0034]
因此,考虑惯性效应且关键性阈值都是常数时,多状态系统的可用度为:
[0035][0036]
2)关键性阈值都是随机变量
[0037]
当所有的关键性阈值τ1,τ2,
…
,τ
n-s-1
都是独立的随机变量且它们的分布函数分别为 h(τ1),h(τ2),
…
,h(τ
n-s-1
),劣化输出状态j(j=s+1,s+2,
…
,n-1)惯性效应的概率测度为:
[0038][0039]
因此,考虑惯性效应且关键性阈值都是随机变量时,多状态系统的可用度为
[0040][0041]
3)关键性阈值既有常数又有随机变量
[0042]
假设τ1,τ2,
…
,τm(1≤m<n-s-1)为常数,τ
m+1
,τ
m+2
,
…
,τ
n-s-1
为独立的随机变量且它们的分布函数分别为h(τ
m+1
),h(τ
m+2
),
…
,h(τ
n-s-1
);
[0043]
对于劣化状态s+1,s+2,
…
,s+m,当s+1≤q≤s+m时,劣化状态q的概率测度为:
[0044][0045]
从状态s+1到状态s+m概率测度的总和为:
[0046][0047]
当s+m+1≤r≤n-1时,劣化状态r的概率测度为:
[0048]
[0049]
从状态s+m+1到状态n-1概率测度的总和为:
[0050][0051]
因此,考虑惯性效应且关键性阈值既有常数又有随机变量时,多状态系统的可用度为:
[0052][0053]
有益效果:
[0054]
从工程技术的角度看,传统的针对多状态系统可靠性评估的方法会低估系统可靠性,进而给维修决策带来不利影响。与现有技术相比,本发明可以揭示惯性效应造成系统运行时间延长和失效延迟之间的机理,对提升多状态系统可靠性,执行精准维修决策带来技术支持。
附图说明
[0055][0056]
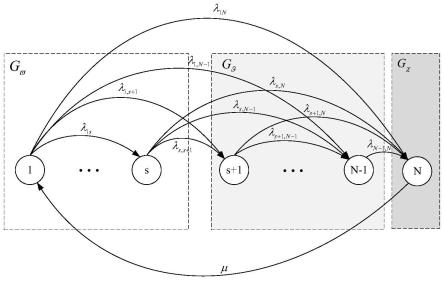
图1为多状态系统输出性能间的状态转移图;
[0057]
图2为考虑惯性效应前后系统输出性能间的关系;
[0058]
图3为考虑惯性效应后系统状态转移间的关系。
具体实施方式
[0059]
下面通过附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于实施例。
[0060]
现有对多状态系统的研究通常假设系统具有n个不同的输出性能水平,且输出性能g(t)满足g(t)∈{g1(t),g2(t),
…
,gn(t)}。记s=inf{s:gs(t)≥w(t)>g
s+1
(t)},则性能状态空间n可以划分为三类:可接受的状态子集劣化状态子集 g
θ
={s+1,s+2,
…
,n-1}和彻底失效状态子集g
χ
={n},即
[0061]
当多状态系统的输出性能状态处于可接受的状态子集时,系统可以正常工作;当多状态系统的输出性能状态处于不可接受的状态子集(含劣化状态子集g
θ
和彻底失效状态子集g
χ
)时,系统就会停止工作。
[0062]
在物理学里,惯性是物体抵抗其运动状态被改变的性质。物体的惯性可以用其质量来衡量,质量越大,惯性也越大。由于惯性是一切物体的固有属性,无论是固体、液体或气体,无论物体是运动还是静止,都具有惯性,即一切物体都具有惯性。当多状态系统的输出性能状态处于劣化状态子集g
θ
={s+1,s+2,
…
,n-1}时,尽管输出性能小于可接受的阈值w(t),但由于输出性能水平大于0,因此现有技术中将劣化状态视为系统的失效状态将会严重低估系统的可靠性水平。正如物理学中物体的惯性性质一样,处于劣化状态的系统会保持一定量的性能输出能力。
[0063]
受物理学中惯性概念的启发,本发明将劣化状态g
θ
={s+1,s+2,
…
,n-1}的惯性效应考虑进多状态系统的可靠性建模中,对每个劣化输出性能状态设置关键性阈值来测度其对系统可靠性的影响程度。惯性效应对系统可靠性的影响类似软硬件系统中的容错机制或故障延迟机制,能显著提高系统可靠性。
[0064]
本发明提供一种考虑惯性效应的多状态退化系统可靠性建模方法,包括如下步骤:
[0065]
步骤一、将多状态退化系统的输出性能依据可接受的满意度水平划分成三类状态子集,分别为可接受的状态子集,劣化状态子集和彻底失效状态子集;
[0066]
所述步骤一的具体内容如下:
[0067]
假设多状态退化系统具有多状态退化系统假设系统具有n个不同的输出性能水平,且输出性能g(t)满足g(t)∈{g1(t),g2(t),
…
,gn(t)},其中n为彻底失效状态;
[0068]
将性能状态空间n划分为三类:
[0069]
1)可接受的状态子集
[0070]
2)劣化状态子集g
θ
={s+1,s+2,
…
,n-1};
[0071]
3)彻底失效状态子集g
χ
={n};
[0072]
其中,s为可接受的状态子集与劣化状态子集的临界状态,记为 s=inf{s:gs(t)≥w(t)>g
s+1
(t)},w(t)为多状态退化系统可接受的满意度水平。
[0073]
步骤二、用连续时间的markov链表示原始系统的状态转移变化,并求解原始系统
的可靠性指标;
[0074]
所述步骤二的具体内容如下:
[0075]
将未考虑惯性效应的多状态退化系统,记为原始系统,用随机过程{x(t),t≥0}来表示原始多状态部件的状态演变过程,当λ
12
,λ
13
,
…
,λ
1n
和μ是常数,即任意两状态间的时间间隔为指数分布时,{x(t),t≥0}为具有状态空间e={1,2,
…
,n}的一连续时间markov 链,如图1所示;
[0076]
原始系统的可靠性指标的求解过程如下:
[0077]
用pj(t)=p{x(t)=j}表示原始系统{x(t),t≥0}处于状态j(j∈e)的概率,在初始条件p1(0)=1,p2(0)=0,
…
,pn(0)=0下,根据kolmogorov定理,可通过求解如下的方程组得到pj(t)的值:
[0078][0079]
可用度是度量系统性能好坏的重要可靠性指标,它表示任一时刻t原始系统处在正常状态的概率,得到pj(t)的值后,原始系统{x(t),t≥0}的可用度水平为:
[0080][0081]
步骤三、用一般性的随机过程表示考虑惯性效应后系统的状态转移变化,并求解新系统的可靠性指标;
[0082]
所述步骤三的具体内容如下:
[0083]
将考虑惯性效应后的多状态退化系统,记为新系统,给每个劣化输出性能状态 s+1,s+2,
…
,n-1设置关键性阈值τ1,τ2,
…
,τ
n-s-1
,并将系统在状态 k(k=s+1,s+2,
…
,n-1)的停留时间记为tk。当tk<τ
k-s
满足时,由于惯性效应的存在,新系统失效在极短时间内可以忽略;由于g
s+1
(t)>g
s+2
(t)>
…
>g
n-1
(t)>0,因此关键性阈值满足τ1>τ2>
…
>τ
n-s-1
>0;
[0084]
用随机过程来表示考虑惯性效应后多状态部件的状态演变过程,由于新系统中状态转移不再具有markov性,不再是一个随机过程,只是一个仅含有状态1(系统运行)和状态0(系统运行)的一般性随机过程;尽管不再具有markov性,但与描述原始系统状态演变的随机过程{x(t),t≥0}间紧密相连。 {x(t),t≥0}和的关系如图2所示;
[0085]
考虑惯性效应后,多状态系统的状态转移关系如图3所示;分三种情况讨论考虑惯
性效应后多状态系统的可靠性水平:
[0086]
(1)关键性阈值都是常数
[0087]
表示原始系统处于劣化状态j(j=s+1,s+2,
…
,n-1)且新系统在时间t时运行,更具体地,反映了劣化状态j惯性效应的概率影响,且
[0088][0089]
其中pi→j(i<j)表示多状态部件在跳跃入状态j前处于状态i(i=1,2,
…
,s)的概率,且
[0090][0091]
因此,考虑惯性效应且关键性阈值都是常数时,多状态系统的可用度为
[0092][0093]
(2)关键性阈值都是随机变量
[0094]
当所有的关键性阈值τ1,τ2,
…
,τ
n-s-1
都是独立的随机变量且它们的分布函数分别为 h(τ1),h(τ2),
…
,h(τ
n-s-1
)。劣化输出状态j(j=s+1,s+2,
…
,n-1)惯性效应的概率测度为
[0095][0096]
因此,考虑惯性效应且关键性阈值都是随机变量时,多状态系统的可用度为:
[0097][0098]
(3)关键性阈值既有常数又有随机变量
[0099]
考虑测度劣化输出性能惯性效应的关键性阈值既有常数又有随机变量的情形;不失一般性,假设τ1,τ2,
…
,τm(1≤m<n-s-1)为常数,τ
m+1
,τ
m+2
,
…
,τ
n-s-1
为独立的随机变量且它们的分布函数分别为h(τ
m+1
),h(τ
m+2
),
…
,h(τ
n-s-1
);
[0100]
对于劣化状态s+1,s+2,
…
,s+m,当s+1≤q≤s+m时,劣化状态q的概率测度为:
[0101][0102]
从状态s+1到状态s+m概率测度的总和为:
[0103][0104]
当s+m+1≤r≤n-1时,劣化状态r的概率测度为:
[0105][0106]
从状态s+m+1到状态n-1概率测度的总和为
[0107][0108]
因此,考虑惯性效应且关键性阈值既有常数又有随机变量时,多状态系统的可用度为
[0109][0110]
本专利中涉及到的字母及其含义如下:
[0111]
[0112][0113]
在考虑惯性效应后,无论测度化输出性能惯性效应强度的关键性阈值都是常数,还是关键性阈值都是随机变量,还是关键性阈值既有常数又有随机变量的情形,系统的可用度都提到了明显提升。因此,从工程技术的角度看,传统的针对多状态系统可靠性评估的方法会低估系统可靠性,进而给维修决策带来不利影响。与现有技术相比,本发明可以揭示惯性效应造成系统运行时间延长和失效延迟之间的机理,对提升多状态系统可靠性,执行精准维修决策带来技术支持。
[0114]
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1