一种车辆定位方法、终端设备及存储介质与流程
本发明涉及车辆定位领域,尤其涉及一种车辆定位方法、终端设备及存储介质。
背景技术:
1、随着智能交通的不断发展,自动泊车将逐渐发展为车辆的标配功能。精确的车辆定位是自动泊车中路径规划与控制的前提。目前车辆定位方法主要有基于视觉或激光雷达slam定位、基于卫星导航信号(gps)定位、基于轮速传感器定位、基于惯性测量单元(imu)定位和基于多传感器融合定位等方法。基于视觉方法对于光线较敏感,且受限于存在较多明显特征点的场合。基于激光雷达方法成本较高,难以广泛推广。基于gps方法仅适用于开阔场地,而自动泊车场景多存在于高楼密集的街区、树荫茂密的街道或地下车库等gps信号严重受限制的场所,单纯依靠gps的方法存在较大定位偏差甚至失效。基于轮速传感器和imu方法利用车辆后轴轮速和imu横摆角速率信息,结合三角函数法进行航迹推理。该方法的性能主要取决于轮速传感器和imu的精度,而在复杂行驶过路中容易引入噪声,且不易分离或校正。当车辆速度较低、车辆轮胎磨损、气压不足或路面因素导致轮胎受力不均匀,轮速数据均容易产生误差;imu安装到车辆上难免存在角度偏差,导致两坐标系无法重合,imu数据无法准确表达车辆运动状态。目前主流的多传感器融合方法为基于卡尔曼滤波器或其变种,其融合了不同传感器的特性可以得到更精确的结果。由于对车辆运动状态建模存在诸多约束与假设,难以准确地描述复杂的车辆运动过程。在不同的行驶环境下,滤波器的部分参数更是难以确定,如过程噪声参数与观测噪声参数,其并非固定值且易受环境影响而变化。
技术实现思路
1、为了解决上述问题,本发明提出了一种车辆定位方法、终端设备及存储介质。
2、具体方案如下:
3、一种车辆定位方法,包括以下步骤:
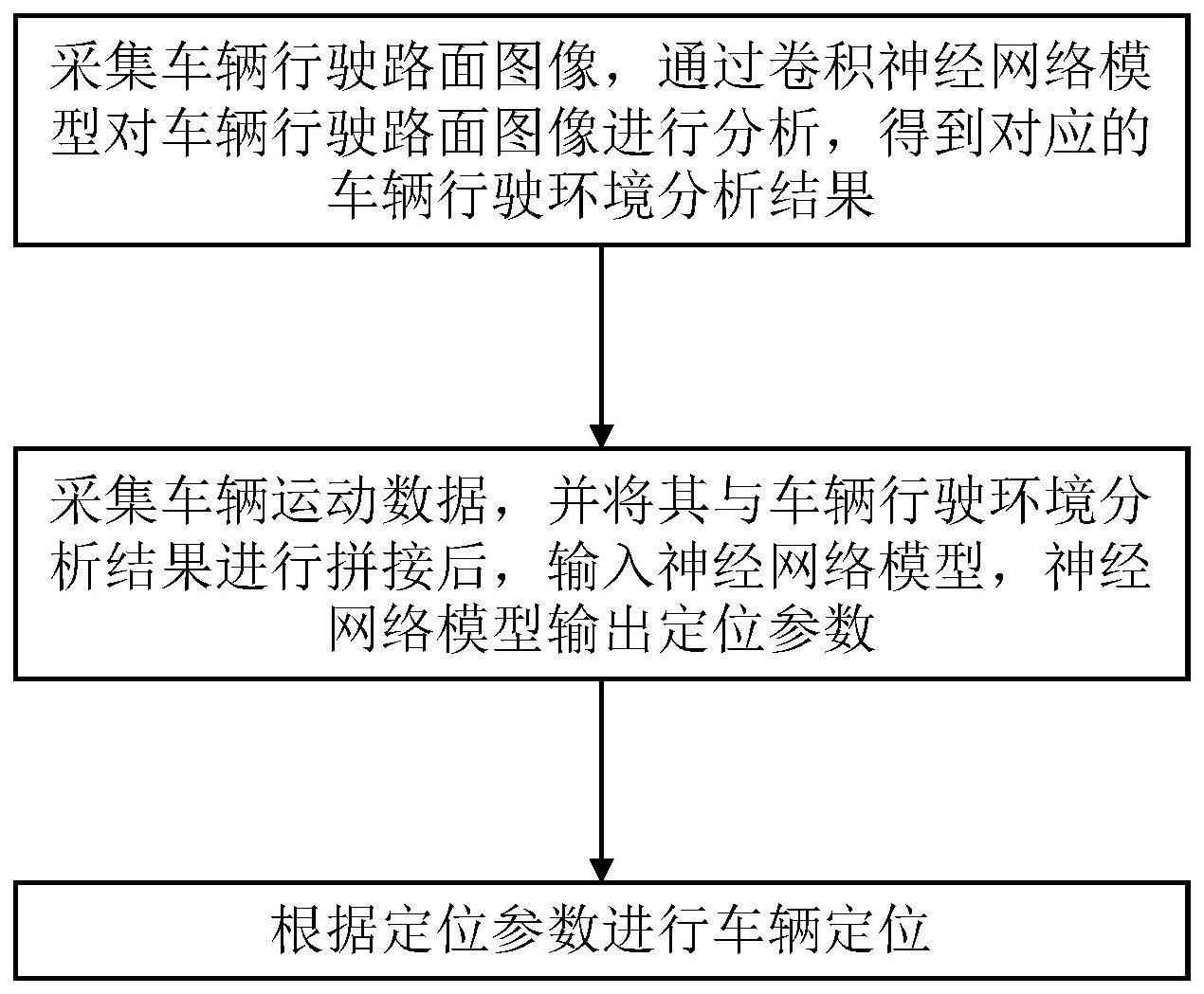
4、s1:采集车辆行驶路面图像,通过卷积神经网络模型对车辆行驶路面图像进行分析,得到对应的车辆行驶环境分析结果;
5、s2:采集车辆运动数据,并将其与车辆行驶环境分析结果进行拼接后,输入神经网络模型,神经网络模型输出定位参数;
6、s3:根据定位参数进行车辆定位。
7、进一步的,车辆运动数据包括车辆的四轮车速、方向盘转角和imu的6轴数据。
8、进一步的,定位参数包括x轴速度y轴速度z轴速度航向角速率置信度σ、阿克曼前轮偏角δf、左后轮的轮速修正系数λl和右后轮的轮速修正系数λr。
9、进一步的,神经网络模型的损失函数loss的计算公式为:
10、
11、其中,n表示样本数量,i表示第i个样本,.表示l2范数,表示第i个样本对应的x轴、y轴、z轴和航向角的实际增量信息,ui表示第i个样本对应的神经网络模型输出的x轴、y轴、z轴和航向角的第一预测增量信息,σi表示第i个样本对应的神经网络模型输出结果的置信度,表示第i个样本对应的x轴、y轴和航向角的实际增量信息,ui′表示结合车辆运动学模型和三角函数法得到的第i个样本对应的x轴、y轴和航向角的第二预测增量信息。
12、进一步的,第二预测增量信息的计算公式为:
13、
14、
15、
16、
17、其中,dx2、dy2、分别表示x轴、y轴和航向角的第二预测增量信息,vk-1和vk分别表示前一时刻与当前时刻车辆的速度,δt表示当前时刻与前一时刻的时间间隔,和分别表示前一时刻与当前时刻车辆的航向角,和分别表示前一时刻与当前时刻车辆的航向角速率,λl和λr分别表示车辆左后轮与右后轮的轮速修正系数,vrl和vrr分别表示左后轮与右后轮的轮速。
18、进一步的,在神经网络模型的训练阶段,设定车辆的航向角速率采用根据车辆运动学模型得到的车辆航向角速率在神经网络模型训练结束后的车辆定位阶段,设定车辆的航向角速率的计算公式为:其中,表示神经网络模型输出的航向角速率的预测值,为根据车辆运动学模型得到的车辆航向角速率,σ表示神经网络模型输出结果的置信度。
19、进一步的,车辆定位中的最终增量信息u的计算公式为:
20、u=σui+(1-σ)ui′。
21、一种车辆定位终端设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例上述的方法的步骤。
22、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例上述的方法的步骤。
23、本发明采用如上技术方案,通过深度学习方法强大的学习能力,对车辆行驶环境和不同传感器参数特性进行综合分析,能够获得更为准确的定位。
技术特征:
1.一种车辆定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车辆定位方法,其特征在于:车辆运动数据包括车辆的四轮车速、方向盘转角和imu的6轴数据。
3.根据权利要求1所述的车辆定位方法,其特征在于:定位参数包括x轴速度y轴速度z轴速度航向角速率置信度σ、阿克曼前轮偏角δf、左后轮的轮速修正系数λl和右后轮的轮速修正系数λr。
4.根据权利要求1所述的车辆定位方法,其特征在于:神经网络模型的损失函数loss的计算公式为:
5.根据权利要求4所述的车辆定位方法,其特征在于:第二预测增量信息的计算公式为:
6.根据权利要求1所述的车辆定位方法,其特征在于:在神经网络模型的训练阶段,设定车辆的航向角速率采用根据车辆运动学模型得到的车辆航向角速率在神经网络模型训练结束后的车辆定位阶段,设定车辆的航向角速率的计算公式为:其中,表示神经网络模型输出的航向角速率的预测值,为根据车辆运动学模型得到的车辆航向角速率,σ表示神经网络模型输出结果的置信度。
7.根据权利要求4所述的车辆定位方法,其特征在于:车辆定位中的最终增量信息u的计算公式为:
8.一种车辆定位终端设备,其特征在于:包括处理器、存储器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1~7中任一所述方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1~7中任一所述方法的步骤。
技术总结
本发明涉及一种车辆定位方法、终端设备及存储介质,该方法中包括:S1:采集车辆行驶路面图像,通过卷积神经网络模型对车辆行驶路面图像进行分析,得到对应的车辆行驶环境分析结果;S2:采集车辆运动数据,并将其与车辆行驶环境分析结果进行拼接后,输入神经网络模型,神经网络模型输出定位参数;S3:根据定位参数进行车辆定位。本发明通过深度学习方法强大的学习能力,对车辆行驶环境和不同传感器参数特性进行综合分析,能够获得更为准确的定位。
技术研发人员:江永付,谢超,陈海沯,陈从华
受保护的技术使用者:明见(厦门)软件开发有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!