双飞机相对动态LRCS的计算方法
本发明属于航天与激光雷达,具体涉及一种双飞机相对动态lrcs的计算方法。
背景技术:
1、由于航天技术的不断发展,空中高速飞机越来多,各个国家之间信息对抗变得越来越激烈。为了适应现代电子战的特点,各国在电子对抗装备方面投入了大量人力物力进行研究开发。近年来,对于空中高速飞行目标的激光探测技术研究一直国内外关注的重点,它与传统的雷达探测目标在性能指标方面存在着很大的差异,通过激光探测技术研究能够雷达目标探测有益的补充。空中高速动态飞行目标(如:飞机、炮弹、导弹)的探测研究,出现在激光探测技术的发展中具有十分重要的意义。在靶场测量中,等制导或非制导飞行目标的轨迹测量具有重要意义。
2、雷达目标识别技术的应用非常广泛,包括对于不明目标的有效探测和侦察,目标的精确对抗打击,目标的高精度寻找,对抗与反对抗等,雷达目标识别技术能够有效提高预警能力,从而能够更好地提升安全系数。目标特征是由雷达发射的电磁波经过目标表面散射产生的信息,它可以描述目标某些方面的特性,是进行雷达目标识别的关键和主要条件。激光雷达散射截面作为目标特征属性的一部分,是雷达系统设计、光电对抗、目标识别以及光电预警等应用的重要依据参数。目前对飞行目标lrcs的计算仅局限于对单飞行目标的lrcs计算,缺乏对于双飞行目标相对动态lrcs的计算方法。
技术实现思路
1、本发明的目的是提供双飞机相对动态lrcs的计算方法,解决了现有技术中对飞行目标lrcs(复杂体粗糙面激光雷达散射截面)的计算仅局限于对单飞行目标lrcs计算的问题。
2、本发明所采用的技术方案是;
3、双飞机相对动态lrcs的计算方法,具体按照如下步骤进行:
4、步骤1:结合粗糙面散射理论和计算图形学,利用基尔霍夫方法,建立复杂体粗糙面激光雷达散射截面的计算模型;
5、步骤2:通过3dsmax软件,建立所要需计算的飞机的三角形面元模型;
6、步骤3:对每个三角形面元进行细分,并建立目标坐标系与本地坐标系的转换关系,确定各点坐标,进而获得面元的中心点、法线及面积;
7、步骤4:建立观测点与被观测目标的坐标系,对被观测目标飞机进行视觉方向上的消隐处理,获取目标在探测视角上的有效面元数据,求得各面元lrcs的值,通过代数求和得到当前时刻下总目标的lrcs值。
8、本发明的特点还在于;
9、步骤1具体为:粗糙目标的激光散射场是目标几何形状、光学常数特性以及目标表面机械加工特性或涂层性质等的复杂函数;根据随机场的分析方法,可将其相应的lrcs分解为相干部分和非相干部分,即如下公式(1):
10、<σ>=<σ>i+<σ>c (1);
11、其中,基尔霍夫适用的条件是k0l>6,l2>2.76δλ,δ为目标表面材料的高度起伏均方根值,l为目标表面材料的相关长度;
12、非相干分量对照明区满足如下公式(2)的叠加关系:
13、
14、其中,σ0是材料单位面积的散射截面,它可由材料表面的起伏方差、相关长度、反射参数等特征参量求出,接着用实验方法测量得到;u为遮蔽函数,表示积分在照射区进行,对于简单目标u满足如下公式(3):
15、
16、其中,为入射方向的单位矢量,为面元法线方向的单位矢量;
17、当入射方向靠近目标表面法线方向时,rcs相干分量的作用不能再忽略,尤其对小粗糙度的目标,其<σ>c一直占主导地位;可以证明rcs相干分量<σ>c与理想导体后向rcsσb关系为如下公式(4):
18、<σ>c=σb|rp|2|χ(-2k0)|2 (4);
19、其中,rp为菲涅耳反射系数,χ为粗糙面起伏的特征函数,σb可由如下公式(5)的几何光学的方法得到:
20、
21、其中,为观测点到目标坐标系的位置矢量。
22、步骤2具体为:
23、步骤2.1:建立飞机的几何模型;
24、步骤2.2:对飞机模型表面进行网格划分,生成若干三角形面元;
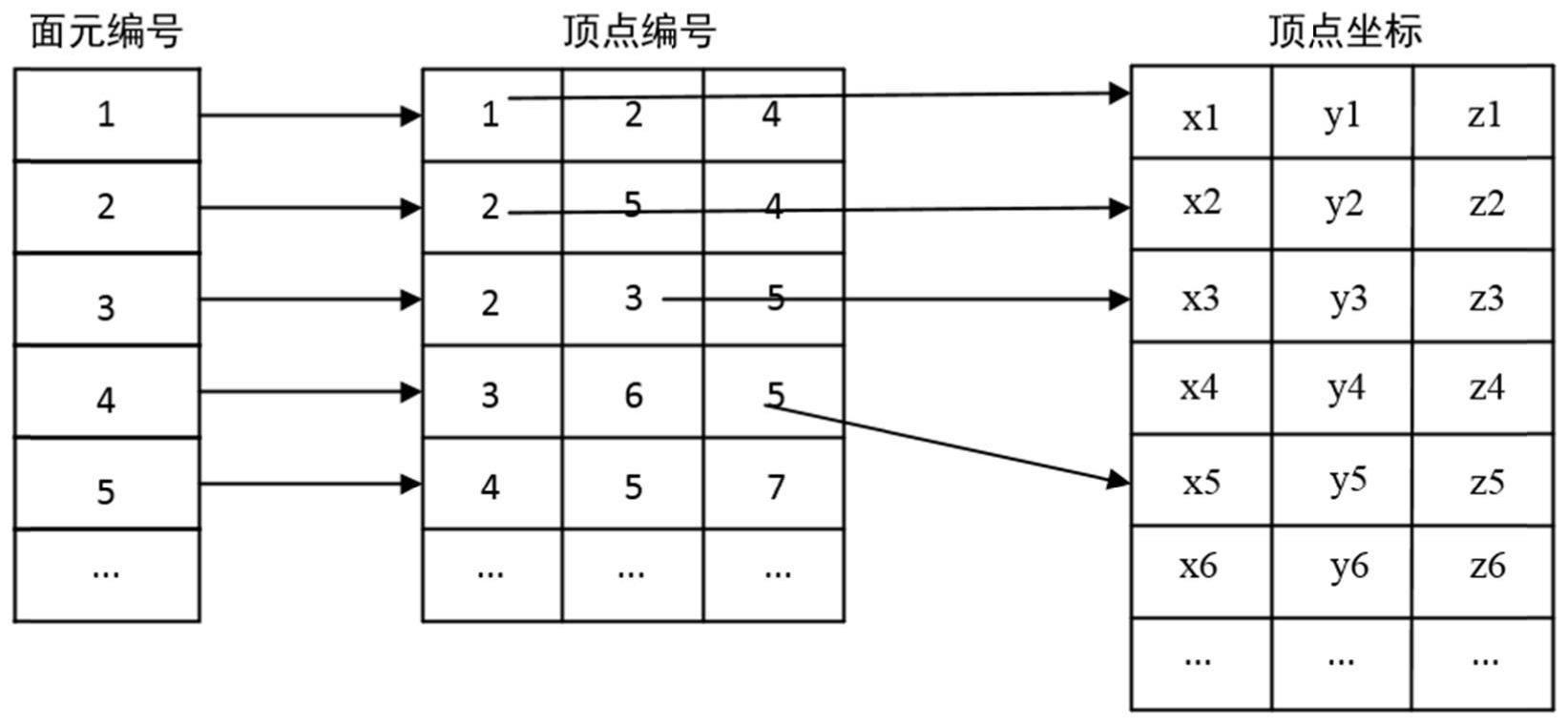
25、步骤2.3:对面元进行编号、存贮。
26、步骤3具体为:
27、步骤3.1:取出需要细分的面元,确定面元细分的点;
28、步骤3.2:确定细分各点底坐标;
29、步骤3.3:存储点索引格式,进行数据转化;
30、步骤3.4:部件合成。
31、步骤4中,建立观测点与被观测目标的坐标系具体为:设置飞机模型一与飞机模型二的飞行参数和表面材料信息;假设飞机模型一的中心位置为观测点,则飞机模型二为被观测目标,即飞机模型一的中心位置所在的坐标系为本地坐标系,飞机模型二所在的坐标系为目标坐标系。
32、本发明的有益效果是,本发明双飞机相对动态lrcs的计算方法及其控制方法,从激光散射理论、激光雷达、粗糙面散射、复杂目标3d建模、目标激光雷达散射截面的计算、目标运行轨迹的跟踪等方面出发,系统讨论高速飞行目标激光雷达散射特性,针对两个高速运动的飞机在不同飞行轨迹和飞行姿态,研究彼此的视角下对方的动态激光散射截面特性,为如激光雷达制导、预警、侦察,目标探测、特征提取、识别,民用工业中空空、地空激光监测等领域提供了一定的帮助,具有一定的实用意义。
技术特征:
1.双飞机相对动态lrcs的计算方法,其特征在于,具体按照如下步骤进行:
2.根据权利要求1所述的双飞机相对动态lrcs的计算方法,其特征在于,步骤1具体为:粗糙目标的激光散射场是目标几何形状、光学常数特性以及目标表面机械加工特性或涂层性质的复杂函数,根据随机场的分析方法,可将其相应的lrcs分解为相干部分和非相干部分,即如下公式(1):
3.根据权利要求1所述的双飞机相对动态lrcs的计算方法,其特征在于,步骤2具体为:
4.根据权利要求1所述的双飞机相对动态lrcs的计算方法,其特征在于,步骤3具体为:
5.根据权利要求1所述的双飞机相对动态lrcs的计算方法,其特征在于,步骤4中,建立观测点与被观测目标的坐标系具体为:设置飞机模型一与飞机模型二的飞行参数和表面材料信息;假设飞机模型一的中心位置为观测点,则飞机模型二为被观测目标,即飞机模型一的中心位置所在的坐标系为本地坐标系,飞机模型二所在的坐标系为目标坐标系。
技术总结
本发明公开了双飞机相对动态LRCS的计算方法及其控制方法,结合粗糙面散射理论和计算图形学,利用基尔霍夫方法,建立LRCS计算模型;对飞机目标进行几何建模,将模型目标表面网格化处理,分解为若干三角形面元,并进行编码;对三角形面元进行细分,建立目标坐标系与本地坐标系的转换关系,确定坐标;建立观测点与被观测目标的坐标系,对目标飞机进行消隐处理,获取有效面元数据,求得各面元LRCS的值,通过代数求和得到当前时刻下总目标的LRCS值。本发明根据激光雷达工作原理,通过3D建模、仿真,结合激光雷达探测目标散射理论,可以研究两个高速飞行载体之间的相互视角下对方动态激光散射截面。
技术研发人员:王明军,代飞,张妍,刘豪振,刘敏,杜桂中,刁鲁欣
受保护的技术使用者:西安理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!