一种顾及影像畸变的遥感影像融合方法及计算机可读介质
1.本发明属于图像处理技术领域,具体涉及一种顾及影像畸变的遥感影像融合方法及计算机可读介质。
背景技术:
2.高空间分辨率影像与高光谱分辨率影像之间融合称作遥感图像空谱融合,由于能够突破成像系统空间与光谱分辨率之间的固有矛盾,空谱融合是遥感图像融合领域的热点问题。但在空谱融合中,由于空谱影像数据来源存在差异、影像之间的配准误差会对融合性能产生较大影响。此外遥感影像覆盖范围广与内部地形起伏较大的特点导致影像的局部几何变形通常各不相同,即影像存在内畸变,此时对整张影像采用相同的配准模型难以取得较高的配准精度,进一步制约融合效果。如何有效提高配准精度是空谱融合亟需解决的难题。
技术实现要素:
3.本发明针对现有技术的不足,提供一种顾及影像畸变的遥感影像融合方法及计算机可读介质。考虑到影像内畸变导致配准精度低进而影响融合效果,在进行融合时,结合粗配准与分块精配准方法,提出一种顾及影像畸变的遥感影像融合方法,该方法适用于高空间分辨率与高光谱分辨率影像之间的融合,可为遥感技术的进一步应用提供技术保障。
4.为了达到上述目的,本发明提供的技术方案是一种顾及影像畸变的遥感影像融合方法,包括以下步骤:
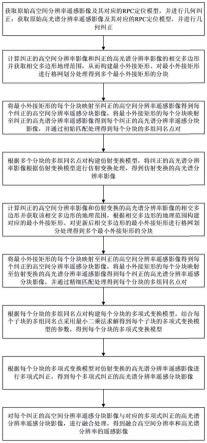
5.步骤1:获取原始高空间分辨率遥感影像及其对应的rpc定位模型,进行几何纠正得到纠正的高空间分辨率遥感影像;获取高光谱分辨率遥感影像及其对应的rpc定位模型,进行几何纠正后得到纠正的高光谱分辨率遥感影像;
6.步骤2:计算纠正的高空间分辨率影像和纠正的高光谱分辨率影像的相交多边形并获取相交多边形的地理范围,根据相交多边形的地理范围构建相交多边形的最小外接矩形。对相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块;
7.步骤3:将最小外接矩形的每个分块映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,将最小外接矩形的每个分块映射至纠正的高光谱分辨率遥感影像得到每个纠正的高光谱分辨率遥感分块影像,每个纠正的高空间分辨率遥感分块影像与对应的每个纠正的高光谱分辨率遥感分块影像通过初始匹配处理得到每个分块的多组同名点对;
8.步骤4:根据多个分块的多组同名点对构建仿射变换模型,将纠正的高光谱分辨率影像根据仿射变换模型进行仿射变换处理,得到仿射变换的高光谱分辨率影像;
9.步骤5:计算纠正的高空间分辨率影像和仿射变换的高光谱分辨率影像更新后相交多边形并获取更新后相交多边形的地理范围,根据更新后相交多边形的地理范围构建更新后相交多边形的最小外接矩形。对更新后相交多边形的最小外接矩形进行格网划分处理
得到多个最小外接矩形的分块;
10.步骤6:将最小外接矩形的每个分块映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,将最小外接矩形的每个分块映射至仿射变换的高光谱分辨率遥感影像得到每个纠正的高光谱分辨率遥感分块影像,每个纠正的高空间分辨率遥感分块影像与对应的每个仿射变换的高光谱分辨率遥感分块影像通过精细匹配处理得到每个分块的多组同名点对;
11.步骤7:根据每个分块的多组同名点对构建每个分块的多项式变换模型,结合每个子块的多组同名点采用最小二乘法求解得到每个子块的多项式变换模型的参数,得到每个分块的多项式变换模型;
12.步骤8:根据每个分块的二次多项式变换模型对仿射变换的高光谱分辨率遥感影像进行二次多项式纠正,得到每个二次多项式纠正的高光谱分辨率遥感分块影像。
13.步骤9:对每个纠正的高空间分辨率遥感分块影像与对应的二次多项式纠正的高光谱分辨率遥感分块影像,进行融合处理,得到融合高空间分辨率和高光谱分辨率的遥感影像;
14.作为优选,步骤2计算纠正的高空间分辨率影像和纠正的高光谱分辨率影像的相交多边形,具体过程如下:
15.根据纠正的高空间分辨率影像四角点地理坐标构建纠正的高空间分辨率影像矢量多边形;
16.根据纠正的高光谱分辨率影像四角点地理坐标构建纠正的高光谱分辨率影像矢量多边形;
17.通过空间求交计算方法计算得到纠正的高空间分辨率影像矢量多边形与纠正的高光谱分辨率影像矢量多边形之间的相交多边形。
18.步骤2所述获取相交多边形的地理范围,根据相交多边形的地理范围构建相交区域的最小外接矩形,具体过程如下:
19.依次获取相交多边形中每个点的经度、每个点的纬度;
20.在相交多边形中多个点的经度中筛选出相交多边形中每个点的经度最小值、相交多边形中每个点的经度最大值,构建相交多边形的经度范围定义如下:
21.[fmin_lon,fmax_lon]
[0022]
其中,fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值;
[0023]
在相交多边形中多个点的纬度中筛选出相交多边形中每个点的纬度最小值、相交多边形中每个点的维度最大值,构建相交多边形的纬度范围,定义如下:
[0024]
[fmin_lat,fmax_lat]
[0025]
其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0026]
将(fmax_lon、fmln_lat)、(fmax_lon、fmax_lat)、(fmax_lon、fmax_lat)、(fmax_lon、fmin_lat)作为相交多边形的最小外接矩形的四个顶点以构建相交多边形的最小外接矩形。
[0027]
步骤2所述对相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩
形的分块,具体如下:
[0028]
设定经度方向分格网划分个数为nfbk_lon,设定纬度方向分格网划分个数为nfbk_lat;
[0029]
计算每个最小外接矩形分块的经度宽度、每个最小外接矩形分块的纬度高度,具体如下:
[0030][0031]
其中,δf_lon为每个最小外接矩形分块的经度宽度,δf_lat为每个最小外接矩形分块的纬度高度,nfbk_lon为经度方向分格网划分个数,nfbk_lat为设定纬度方向分格网划分个数,fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值,其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0032]
第j行第i列的最小外接矩形分块,定义为:
[0033]
fbk
i,j
[0034]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0035]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_lat为纬度方向分格网划分个数
[0036]
依次计算第j行第i列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0037][0038]
其中,表示第j行第i列的最小外接矩形分块的经度最小值,表示第j行第i列的最小外接矩形分块的经度最大值,表示第j行第i列的最小外接矩形分块的纬度最小值,表示第j行第i列的最小外接矩形分块的纬度最大值;
[0039]
fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值;其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0040]
将将作为四个顶点以构建第j行第i列的最小外接矩形分块对应的地理矩形分块;
[0041]
作为优选,步骤3所述映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0042]
根据第j行第i列的最小外接矩形分块四个顶点
组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0043]
第j行第i列的纠正的高空间分辨率遥感分块影像,定义为:
[0044]
hspa_fbk
i,j
[0045]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0046]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_lat为纬度方向分格网划分个数。
[0047]
步骤3所述映射至纠正的高光谱分辨率遥感影像得到每个高光谱分辨率遥感分块影像,具体过程如下:
[0048]
根据第j行第i列的最小外接矩形分块四个顶点根据第j行第i列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高光谱分辨率遥感影像获取对应地理范围的图像内容。
[0049]
第j行第i列的纠正的高光谱分辨率遥感分块影像,定义为:
[0050]
hspe_fbk
i,j
[0051]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0052]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_lat为纬度方向分格网划分个数;
[0053]
步骤3所述通过初始匹配处理得到每个分块的多组同名点对,具体过程如下:
[0054]
对第j行第i列的纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
和对应的第j行第i列的纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
,采用sift+knn匹配算法获取第j行第i列纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
像素坐标和第j行第i列纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
像素坐标。
[0055]
获取第j行第i列子块经度最小值纬度最小值将第j行第i列纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
像素坐标,按照像素坐标和分辨率乘积与最小值之和的方式将其映射为高空间分辨率遥感分块影像地理坐标;
[0056]
获取第j行第i列子块经度最小值纬度最小值将第j行第i列纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
像素坐标,按照像素坐标和分辨率乘积与最小值之和的方式将其高光谱分辨率遥感分块影像映射为地理坐标;
[0057]
将第j行第i列子块对应的高空间分辨率遥感分块影像地理坐标和高光谱分辨率遥感分块影像地理坐标合并第j行第i列多组同名点对。
[0058]
作为优选,步骤4所述根据多个分块的多组同名点对构建仿射变换模型,具体过程如下:
[0059]
根据所有分块同名点对中对应的高空间分辨率遥感分块影像地理坐标和高光谱分辨率遥感分块影像地理坐标构建全局仿射变换模型,并采用最小二乘方法求解仿射变换模型参数。
[0060]
步骤4所述将纠正后高光谱分辨率影像根据仿射变换模型进行仿射变换处理,具体过程如下:
[0061]
结合仿射变换模型参数(e0,e1,e2,f0,f1,f2),采用间接纠正的方法,将纠正后高光谱分辨率影像进行仿射变换纠正,得到仿射变换的高光谱分辨率影像。
[0062]
作为优选,步骤5所述计算纠正的高空间分辨率影像和仿射变换的高光谱分辨率影像更新后相交多边形,具体过程如下:
[0063]
根据纠正的高空间分辨率影像四角点地理坐标构建纠正的高空间分辨率影像矢量多边形。根据仿射变换的高光谱分辨率影像四角点地理坐标构建仿射变换的高光谱分辨率影像矢量多边形。通过空间求交计算方法计算得到纠正的高空间分辨率影像矢量多边形与仿射变换的高光谱分辨率影像矢量多边形之间的相交多边形,即为更新后相交多边形。
[0064]
步骤5所述获取更新后相交多边形的地理范围,根据更新后相交多边形地理范围构建相交区域的最小外接矩形,具体过程如下:
[0065]
依次获取更新后相交多边形中每个点的经度、每个点的纬度;
[0066]
在更新后相交多边形中多个点的经度中筛选出更新后相交多边形中每个点的经度最小值、更新后相交多边形中每个点的经度最大值,构建更新后相交多边形的经度范围定义如下:
[0067]
[smin_lon,smax_lon]
[0068]
其中,smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;
[0069]
在更新后相交多边形中多个点的纬度中筛选出更新后相交多边形中每个点的纬度最小值、更新后相交多边形中每个点的纬度最大值,构建更新后相交多边形的纬度范围,定义如下:
[0070]
[smin_lat,smax_lat]
[0071]
其中,smin_lat表示更新后相交多边形中每个点的纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;
[0072]
将(smax_lon、smin_lat)、(smax_lon、smax_lat)、(smax_lon、smax_lat)、(smax_lon、smin_lat)作为更新后相交多边形的最小外接矩形的四个顶点以构建更新后相交多边形的最小外接矩形。
[0073]
步骤5所述对更新后相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块,具体如下:
[0074]
设定经度方向分格网划分个数为nsbk_lon,设定纬度方向分格网划分个数为nsbk_lat;
[0075]
计算每个最小外接矩形分块的经度宽度、每个最小外接矩形分块的纬度高度,具体如下:
[0076][0077]
其中,δs_lon为每个最小外接矩形分块的经度宽度,δs_lat为每个最小外接矩形分块的纬度高度,nsbk_lon为经度方向分格网划分个数,nsbk_lat为设定纬度方向分格网划分个数,smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;其中,smin_lat表示更新后相交多边形中每个点的
纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;
[0078]
第q行第p列的最小外接矩形分块,定义为:
[0079]
sbk
p,q
[0080]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0081]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_lon为方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数
[0082]
依次计算第q行第p列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0083][0084]
其中,表示第q行第p列的最小外接矩形分块的经度最小值,表示第q行第p列的最小外接矩形分块的经度最大值,表示第q行第p列的最小外接矩形分块的纬度最小值,表示第q行第p列的最小外接矩形分块的纬度最大值,
[0085]
smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;其中,smin_lat表示更新后相交多边形中每个点的纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;将值,smax_lat表示更新后相交多边形中每个点的纬度最大值;将作为四个顶点以构建第q行第p列的最小外接矩形分块对应的地理矩形分块;
[0086]
作为优选,步骤6所述映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0087]
根据第q行第p列的最小外接矩形分块四个顶点根据第q行第p列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0088]
第q行第p列的纠正的高空间分辨率遥感分块影像,定义为:
[0089]
hspa_sbk
p,q
[0090]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0091]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_lon为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0092]
步骤6所述映射至仿射变换的高光谱分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0093]
根据第q行第p列的最小外接矩形分块四个顶点根据第q行第p列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0094]
第q行第p列的仿射变换的高空间分辨率遥感分块影像,定义为:
[0095]
hspe_sbk
p,q
[0096]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0097]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_ion为方向分格网划分个数,nsbk lat为纬度方向分格网划分个数。
[0098]
步骤6所述通过精细匹配处理得到每个分块的多组同名点对,具体过程如下:
[0099]
对第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
进行有效性判定,具体如下:
[0100]
若cnt_hspa_sbk
p,q
≥α,则
[0101]
若cnt_hspa_sbk
p,q
<α,则
[0102]
其中,cnt_hspa_sbk
p,q
表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
像素值大于0的个数,α表示分块有效性判定阈值,表示第q行第p列纠正的高空间分辨率遥感分块影像有效性属性。
[0103]
若则第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe-sbk
p,q
不进行后续匹配。
[0104]
若则第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
进行匹配,具体如下:
[0105]
对q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
,采用sift+ransac匹配算法获取第q行第p列纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
像素坐标和第q行第p列纠正的高光谱分辨率遥感分块影像hspe_sbk
p,q
像素坐标。
[0106]
将第q行第p列分块对应的高空间分辨率遥感分块影像像素坐标和仿射变换的高光谱分辨率遥感分块影像像素坐标合并为第q行第p列分块的多组同名点对。
[0107]
作为优选,步骤7所述根据每个分块的多组同名点对构建每个分块的多项式变换模型具体如下:
[0108]
获取第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
属性
[0109]
若则直接采用第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点对用于多项式模型求解。
[0110]
若依次判断第q行第p-1列的纠正的高空间分辨率遥感分块影像hspa_sbk
p-1,
q属性第q行第p+1列的纠正的高空间分辨率遥感分块影像hspa_sbk
p+1,q
属性第q-1行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q-1
、属性第q+1行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q+1
属性是否为1,若为1则将对应的分块匹配多组同名点对作为当前第q行第p列子块的多组同名点对;
[0111]
第q行第p列分块的多项式变换模型构建具体如下:
[0112]
获取第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
匹配的第h组像素坐标
[0113][0114]
h∈[1,ct
p,q
]ph∈[1,nsbk_lon],qh∈[1,nsbk_lat]
[0115]
其中,表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点数量。h表示序号,nsbk_lon为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0116]
获取第q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的第h组像素坐标
[0117][0118]
h∈[1,ct
p,q
]ph∈[1,nsbk_lon],qh∈[1,nsbk_lat]
[0119]
其中,表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点数量。h表示序号,nsbk_lon为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0120]
依次根据第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
匹配的第h组像素坐标和第q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的第h组像素坐标构建第q行第p列的第h组二次多项式,从而建立整个第q行第p列分块的二次多项式模型,采用最小二乘求解对应的二次多项式模型参数。
[0121]
作为优选,步骤9所述进行融合处理得到融合高空间分辨率和高光谱分辨率的遥感影像,具体如下:
[0122]
设置蓝波段权值为bw、绿波段权值为gw、红波段权值为rw、近红外波段权值为irw。
[0123]
逐像素获取每个纠正的高空间分辨率遥感分块影像与对应的二次多项式纠正的高光谱分辨率遥感分块影像的像素值,计算每个像素值对应的蓝绿红三波段调整值adj1和每个像素值对应的近红外调整值adj2,计算方式如下:
[0124][0125]
其中,hspa
dn
表示纠正的高空间分辨率遥感分块影像上对应的全色像素值,adj1为每个像素值对应的蓝绿红三波段调整值,adj2为每个像素值对应的近红外调整值,avgw1为每个像素对应的红波段、绿波段、蓝波段的加权均值,avgw2为每个像素对应的红波段、绿波段、蓝波段和近红外波段的加权均值,计算方式如下,
[0126][0127]
其中,b
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中蓝波段像素值,g
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中绿波段像素值,r
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中红波段像素值,ir
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中近红外波段像素值。
[0128]
每个像素值对应的蓝绿红三波段调整值adj1和每个像素值对应的近红外调整值
adj2逐像素计算融合后影像值,具体如下:
[0129][0130]
其中,b
fus
表示融合后影像蓝波段像素值,g
fus
表示融合后影像绿波段像素值、r
fus
表示融合后影像红波段像素值、ir
fus
表示融合后影像近红外波段像素值。
[0131]
本发明还提供了一种计算机可读介质,所述计算机可读介质存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,使得所述电子设备执行所述顾及影像畸变的遥感影像融合方法的步骤。
[0132]
本发明优点在于,基于初始配准与分块精细配准策略,并对每个分块单独采用多项式纠正,能有效解决影像内畸变导致融合效果较差问题,提升融合效果。此外,分块思想,对内存开销需求较小,可实现大幅宽遥感影像间融合。
附图说明
[0133]
图1:本发明实施例的方法流程图。
具体实施方式
[0134]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0135]
具体实施时,本发明技术方案提出的方法可由本领域技术人员采用计算机软件技术实现自动运行流程,实现方法的系统装置例如存储本发明技术方案相应计算机程序的计算机可读存储介质以及包括运行相应计算机程序的计算机设备,也应当在本发明的保护范围内。
[0136]
下面结合图1介绍本发明实施例的技术方案为一种顾及影像畸变的遥感影像融合方法,具体如下:
[0137]
步骤1:获取原始高空间分辨率遥感影像及其对应的rpc定位模型,进行几何纠正得到纠正的高空间分辨率遥感影像;获取高光谱分辨率遥感影像及其对应的rpc定位模型,进行几何纠正后得到纠正的高光谱分辨率遥感影像;
[0138]
步骤2:计算纠正的高空间分辨率影像和纠正的高光谱分辨率影像的相交多边形并获取相交多边形的地理范围,根据相交多边形的地理范围构建相交多边形的最小外接矩形。对相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块;
[0139]
步骤2计算纠正的高空间分辨率影像和纠正的高光谱分辨率影像的相交多边形,具体过程如下:
[0140]
根据纠正的高空间分辨率影像四角点地理坐标构建纠正的高空间分辨率影像矢量多边形;
[0141]
根据纠正的高光谱分辨率影像四角点地理坐标构建纠正的高光谱分辨率影像矢量多边形;
[0142]
通过空间求交计算方法计算得到纠正的高空间分辨率影像矢量多边形与纠正的高光谱分辨率影像矢量多边形之间的相交多边形。
[0143]
步骤2所述获取相交多边形的地理范围,根据相交多边形的地理范围构建相交区域的最小外接矩形,具体过程如下:
[0144]
依次获取相交多边形中每个点的经度、每个点的纬度;
[0145]
在相交多边形中多个点的经度中筛选出相交多边形中每个点的经度最小值、相交多边形中每个点的经度最大值,构建相交多边形的经度范围定义如下:
[0146]
[fmin_lon,fmax_lon]
[0147]
其中,fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值:
[0148]
在相交多边形中多个点的纬度中筛选出相交多边形中每个点的纬度最小值、相交多边形中每个点的维度最大值,构建相交多边形的纬度范围,定义如下:
[0149]
[fmin_lat,fmax_lat]
[0150]
其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0151]
将(fmax_lon、fmin_lat)、(fmax_lon、fmax_lat)、(fmax_lon、fmax_lat)、(fmax_lon、fmin_lat)作为相交多边形的最小外接矩形的四个顶点以构建相交多边形的最小外接矩形。
[0152]
步骤2所述对相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块,具体如下:
[0153]
设定经度方向分格网划分个数为nfbk_lon,设定纬度方向分格网划分个数为nfbk_lat;
[0154]
计算每个最小外接矩形分块的经度宽度、每个最小外接矩形分块的纬度高度,具体如下:
[0155][0156]
其中,δf_lon为每个最小外接矩形分块的经度宽度,δf_lat为每个最小外接矩形分块的纬度高度,nfbk_lon=5为经度方向分格网划分个数,nfbk_lat=5为设定纬度方向分格网划分个数,fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值,其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0157]
第j行第i列的最小外接矩形分块,定义为:
[0158]
fbk
i,j
[0159]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0160]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_lat为纬度方向分格网划分个数
[0161]
依次计算第j行第i列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0162][0163]
其中,表示第j行第i列的最小外接矩形分块的经度最小值,表示第j行第i列的最小外接矩形分块的经度最大值,表示第j行第i列的最小外接矩形分块的维度最小值,表示第j行第i列的最小外接矩形分块的纬度最大值;
[0164]
fmin_lon表示相交多边形中每个点的经度最小值,fmax_lon表示相交多边形中每个点的经度最大值;其中,fmin_lat表示相交多边形中每个点的纬度最小值,fmax_lat表示相交多边形中每个点的纬度最大值;
[0165]
将将作为四个顶点以构建第j行第i列的最小外接矩形分块对应的地理矩形分块;
[0166]
步骤3:将最小外接矩形的每个分块映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,将最小外接矩形的每个分块映射至纠正的高光谱分辨率遥感影像得到每个纠正的高光谱分辨率遥感分块影像,每个纠正的高空间分辨率遥感分块影像与对应的每个纠正的高光谱分辨率遥感分块影像通过初始匹配处理得到每个分块的多组同名点对;
[0167]
步骤3所述映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0168]
根据第j行第i列的最小外接矩形分块四个顶点根据第j行第i列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0169]
第j行第i列的纠正的高空间分辨率遥感分块影像,定义为:
[0170]
hspa_fbk
i,j
[0171]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0172]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_1at为纬度方向分格网划分个数。
[0173]
步骤3所述映射至纠正的高光谱分辨率遥感影像得到每个高光谱分辨率遥感分块影像,具体过程如下:
[0174]
根据第j行第i列的最小外接矩形分块四个顶点根据第j行第i列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高光谱分辨率遥感影像获取对应地理范围的图像内容。
[0175]
第j行第i列的纠正的高光谱分辨率遥感分块影像,定义为:
[0176]
hspe_fbk
i,j
[0177]
i∈[1,nfbk_lon],j∈[1,nfbk_lat]
[0178]
其中,i表示经度方向的分块序号,j表示纬度方向的分块序号,nfbk_lon为方向分格网划分个数,nfbk_lat为纬度方向分格网划分个数;
[0179]
步骤3所述通过初始匹配处理得到每个分块的多组同名点对,具体过程如下:
[0180]
对第j行第i列的纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
和对应的第j行第i列的纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
,采用sift+knn匹配算法获取第j行第i列纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
像素坐标和第j行第i列纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
像素坐标。
[0181]
获取第j行第i列子块经度最小值纬度最小值将第j行第i列纠正的高空间分辨率遥感分块影像hspa_fbk
i,j
像素坐标,按照像素坐标和分辨率乘积与最小值之和的方式将其映射为高空间分辨率遥感分块影像地理坐标;
[0182]
获取第j行第i列子块经度最小值纬度最小值将第j行第i列纠正的高光谱分辨率遥感分块影像hspe_fbk
i,j
像素坐标,按照像素坐标和分辨率乘积与最小值之和的方式将其高光谱分辨率遥感分块影像映射为地理坐标;
[0183]
将第j行第i列子块对应的高空间分辨率遥感分块影像地理坐标和高光谱分辨率遥感分块影像地理坐标合并第j行第i列多组同名点对。
[0184]
步骤4:根据多个分块的多组同名点对构建仿射变换模型,将纠正的高光谱分辨率影像根据仿射变换模型进行仿射变换处理,得到仿射变换的高光谱分辨率影像;
[0185]
步骤4所述根据多个分块的多组同名点对构建仿射变换模型,具体过程如下:
[0186]
根据所有分块同名点对中对应的高空间分辨率遥感分块影像地理坐标和高光谱分辨率遥感分块影像地理坐标构建全局仿射变换模型,并采用最小二乘方法求解仿射变换模型参数。
[0187]
步骤4所述将纠正后高光谱分辨率影像根据仿射变换模型进行仿射变换处理,具体过程如下:
[0188]
结合仿射变换模型参数(e0,e1,e2,f0,f1,f2),采用间接纠正的方法,将纠正后高光谱分辨率影像进行仿射变换纠正,得到仿射变换的高光谱分辨率影像。
[0189]
步骤5:计算纠正的高空间分辨率影像和仿射变换的高光谱分辨率影像更新后相交多边形并获取更新后相交多边形的地理范围,根据更新后相交多边形的地理范围构建更新后相交多边形的最小外接矩形。对更新后相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块;
[0190]
步骤5所述计算纠正的高空间分辨率影像和仿射变换的高光谱分辨率影像更新后相交多边形,具体过程如下:
[0191]
根据纠正的高空间分辨率影像四角点地理坐标构建纠正的高空间分辨率影像矢量多边形。根据仿射变换的高光谱分辨率影像四角点地理坐标构建仿射变换的高光谱分辨率影像矢量多边形。通过空间求交计算方法计算得到纠正的高空间分辨率影像矢量多边形与仿射变换的高光谱分辨率影像矢量多边形之间的相交多边形,即为更新后相交多边形。
[0192]
步骤5所述获取更新后相交多边形的地理范围,根据更新后相交多边形地理范围构建相交区域的最小外接矩形,具体过程如下:
[0193]
依次获取更新后相交多边形中每个点的经度、每个点的纬度;
[0194]
在更新后相交多边形中多个点的经度中筛选出更新后相交多边形中每个点的经度最小值、更新后相交多边形中每个点的经度最大值,构建更新后相交多边形的经度范围定义如下:
[0195]
[smin_lon,smax_lon]
[0196]
其中,smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;
[0197]
在更新后相交多边形中多个点的纬度中筛选出更新后相交多边形中每个点的纬度最小值、更新后相交多边形中每个点的纬度最大值,构建更新后相交多边形的纬度范围,定义如下:
[0198]
[smin_lat,smax_lat]
[0199]
其中,smin_lat表示更新后相交多边形中每个点的纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;
[0200]
将(smax_lon、smin_lat)、(smax_lon、smax_lat)、(smax_lon、smax_lat)、(smax_lon、smin_lat)作为更新后相交多边形的最小外接矩形的四个顶点以构建更新后相交多边形的最小外接矩形。
[0201]
步骤5所述,对更新后相交多边形的最小外接矩形进行格网划分处理得到多个最小外接矩形的分块,具体如下:
[0202]
设定经度方向分格网划分个数为nsbk_lon,设定纬度方向分格网划分个数为nsbk_lat;
[0203]
计算每个最小外接矩形分块的经度宽度、每个最小外接矩形分块的纬度高度,具体如下:
[0204][0205]
其中,δs_lon为每个最小外接矩形分块的经度宽度,δs_lat为每个最小外接矩形分块的纬度高度,nsbk_lon=5为经度方向分格网划分个数,nsbk_lat=5为设定纬度方向分格网划分个数,smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;其中,smin_lat表示更新后相交多边形中每个点的纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;
[0206]
第q行第p列的最小外接矩形分块,定义为:
[0207]
sbk
p,q
[0208]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0209]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_lon为方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数
[0210]
依次计算第q行第p列的最小外接矩形分块的最小外接矩形的经度最小值、经度最大值、纬度最小值、纬度最大值,具体如下:
[0211][0212]
其中,表示第q行第p列的最小外接矩形分块的经度最小值,表示第q行第p列的最小外接矩形分块的经度最大值,表示第q行第p列的最小外接矩形分块的纬度最小值,表示第q行第p列的最小外接矩形分块的纬度最大值,
[0213]
smin_lon表示更新后相交多边形中每个点的经度最小值,smax_lon表示更新后相交多边形中每个点的经度最大值;其中,smin_lat表示更新后相交多边形中每个点的纬度最小值,smax_lat表示更新后相交多边形中每个点的纬度最大值;将值,smax_lat表示更新后相交多边形中每个点的纬度最大值;将作为四个顶点以构建第q行第p列的最小外接矩形分块对应的地理矩形分块;
[0214]
步骤6:将最小外接矩形的每个分块映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,将最小外接矩形的每个分块映射至仿射变换的高光谱分辨率遥感影像得到每个纠正的高光谱分辨率遥感分块影像,每个纠正的高空间分辨率遥感分块影像与对应的每个仿射变换的高光谱分辨率遥感分块影像通过精细匹配处理得到每个分块的多组同名点对;
[0215]
步骤6所述映射至纠正的高空间分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0216]
根据第q行第p列的最小外接矩形分块四个顶点根据第q行第p列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0217]
第q行第p列的纠正的高空间分辨率遥感分块影像,定义为:
[0218]
hspa_sbk
p,q
[0219]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0220]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_ion为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0221]
步骤6所述映射至仿射变换的高光谱分辨率遥感影像得到每个纠正的高空间分辨率遥感分块影像,具体过程如下:
[0222]
根据第q行第p列的最小外接矩形分块四个顶点根据第q行第p列的最小外接矩形分块四个顶点组成的地理范围,从纠正的高空间分辨率遥感影像获取对应地理范围的图像内容。
[0223]
第q行第p列的仿射变换的高空间分辨率遥感分块影像,定义为:
[0224]
hspe_sbk
p,q
[0225]
p∈[1,nsbk_lon],q∈[1,nsbk_lat]
[0226]
其中,p表示经度方向的分块序号,q表示纬度方向的分块序号,nsbk_lon为方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0227]
步骤6所述通过精细匹配处理得到每个分块的多组同名点对,具体过程如下:
[0228]
对第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
进行有效性判定,具体如下:
[0229]
若cnt_hspa_sbk
p,q
≥α,则
[0230]
若cnt_hspa_sbk
p,q
<α,则
[0231]
其中,cnt_hspa_sbk
p,q
表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
像素值大于0的个数,α表示分块有效性判定阈值(α=50),表示第q行第p列纠正的高空间分辨率遥感分块影像有效性属性。
[0232]
若则第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
不进行后续匹配。
[0233]
若则第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
进行匹配,具体如下:
[0234]
对q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
,采用sift+ransac匹配算法获取第q行第p列纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
像素坐标和第q行第p列纠正的高光谱分辨率遥感分块影像hspe_sbk
p,q
像素坐标。
[0235]
将第q行第p列分块对应的高空间分辨率遥感分块影像像素坐标和仿射变换的高光谱分辨率遥感分块影像像素坐标合并为第q行第p列分块的多组同名点对。
[0236]
步骤7:根据每个分块的多组同名点对构建每个分块的多项式变换模型,结合每个子块的多组同名点采用最小二乘法求解得到每个子块的多项式变换模型的参数,得到每个分块的多项式变换模型;
[0237]
步骤7所述,根据每个分块的多组同名点对构建每个分块的多项式变换模型具体如下:
[0238]
获取第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
属性
[0239]
若则直接采用第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和对应的q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点对用于多项式模型求解。
[0240]
若依次判断第q行第p-1列的纠正的高空间分辨率遥感分块影像hspa_sbk
p-1,q
属性第q行第p+1列的纠正的高空间分辨率遥感分块影像hspa_sbk
p+1,q
属性第q-1行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q-1
、属性第q+1行第p列的纠正的高空间分辨率遥感分块影像
hspa_sbk
p,q+1
属性是否为1,若为1则将对应的分块匹配多组同名点对作为当前第q行第p列子块的多组同名点对;
[0241]
第q行第p列分块的多项式变换模型构建具体如下:
[0242]
获取第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
匹配的第h组像素坐标
[0243][0244]
h∈[1,ct
p,q
]ph∈[1,nsbk_lon],qh∈[1,nsbk_lat]
[0245]
其中,表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点数量。h表示序号,nsbk_ion为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0246]
获取第q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的第h组像素坐标
[0247][0248]
h∈[1,ct
p,q
]ph∈[1,nsbk_lon],qh∈[1,nsbk_lat]
[0249]
其中,表示第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
和q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的同名点数量。h表示序号,nsbk_lon为经度方向分格网划分个数,nsbk_lat为纬度方向分格网划分个数。
[0250]
依次根据第q行第p列的纠正的高空间分辨率遥感分块影像hspa_sbk
p,q
匹配的第h组像素坐标和第q行第p列的仿射变换的高光谱分辨率遥感分块影像hspe_sbk
p,q
匹配的第h组像素坐标构建第q行第p列的第h组二次多项式,从而建立整个第q行第p列分块的二次多项式模型,采用最小二乘求解对应的二次多项式模型参数。
[0251]
步骤8:根据每个分块的二次多项式变换模型对仿射变换的高光谱分辨率遥感影像进行二次多项式纠正,得到每个二次多项式纠正的高光谱分辨率遥感分块影像。
[0252]
步骤9:对每个纠正的高空间分辨率遥感分块影像与对应的二次多项式纠正的高光谱分辨率遥感分块影像,进行融合处理,得到融合高空间分辨率和高光谱分辨率的遥感影像。
[0253]
步骤9所述进行融合处理,得到融合高空间分辨率和高光谱分辨率的遥感影像具体如下:
[0254]
设置蓝波段权值为bw=0.75、绿波段权值为gw=0.85、红波段权值为rw=0.6、近红外波段权值为irw=0.3。逐像素获取每个纠正的高空间分辨率遥感分块影像与对应的二次多项式纠正的高光谱分辨率遥感分块影像的像素值,计算每个像素值对应的蓝绿红三波段调整值adj1和每个像素值对应的近红外调整值adj2,计算方式如下:
[0255][0256]
其中,hspa
dn
表示纠正的高空间分辨率遥感分块影像上对应的全色像素值,adj1为每个像素值对应的蓝绿红三波段调整值,adj2为每个像素值对应的近红外调整值,avgw1为每个像素对应的红波段、绿波段、蓝波段的加权均值,avgw2为每个像素对应的红波段、绿波段、蓝波段和近红外波段的加权均值,计算方式如下,
[0257][0258]
其中,b
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中蓝波段像素值,g
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中绿波段像素值,r
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中红波段像素值,ir
dn
表示二次多项式纠正的高光谱分辨率遥感分块影像中近红外波段像素值。
[0259]
每个像素值对应的蓝绿红三波段调整值adj1和每个像素值对应的近红外调整值adj2逐像素计算融合后影像值,具体如下:
[0260][0261]
其中,b
fus
表示融合后影像蓝波段像素值,g
fus
表示融合后影像绿波段像素值、r
fus
表示融合后影像红波段像素值、ir
fus
表示融合后影像近红外波段像素值。
[0262]
本发明的具体实施例还提供了一种计算机可读介质。
[0263]
所述计算机可读介质为服务器工作站;
[0264]
所述服务器工作站存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,使得所述电子设备执行本发明实施例的顾及影像畸变的遥感影像融合方法的步骤。
[0265]
应当理解的是,本说明书未详细阐述的部分均属于现有技术。
[0266]
应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,还可以做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1