电动悬浮系统电磁参数优化方法及变参数处理装置与流程
本发明涉及航天或者交通,尤其涉及一种电动悬浮系统电磁方案设计优化方法及变参数处理装置。
背景技术:
1、超高速列车这一概念最早由埃隆·马斯克于2013年首次在《hyperloop alpha》白皮书中提出,阐述了对hyperloop系统如何运作的技术思考,并提出“超级高铁”系统最高速度可达1223km/h。超高速真空管道交通是采用磁悬浮列车技术,利用密闭管道,通过抽取空气达到接近真空的低气压环境,从而实现列车全天候在无轮轨阻力、低空气阻力、低噪声模式下超高速(1000km/h及以上速度)运行的新型轨道交通技术。目前,国际上具有代表性的技术方案有三种:一是采用常导电磁悬浮的瑞士swissmetro方案,二是采用气动/永磁悬浮和轮轨列车的美国hyperloop系统计划,三是采用高温超导磁悬浮技术的美国et3和我国西南交通大学的方案。
2、超高速超导电动悬浮系统由超导磁体及悬浮感应装置组成,超导电动悬浮利用超导线圈产生强大的磁场实现电动悬浮。超高速悬浮系统是一个结构复杂、运行要求极高的系统,试验成本高,该系统的各项指标及性能与超导磁体及悬浮感应装置的设计参数相对复杂。目前,国内外对于超高速悬浮系统仍处于研究初期,也尚未全面掌握其工作机理以及不同参数对工作性能的影响规律。在2021年公开的外国文献“equivalent inductancemodelforthedesignanalysisofelectrodynamicsuspensioncoils forhyperloop”是在超高速超导电动悬浮系统中,基于null-fluxcoil线圈分析相关参数间的关联关系,并未对悬浮感应板相关参数、三维力以及系统结构的电磁特性进行检验分析。
3、为了满足超高速悬浮系统的各项指标,提高系统性能,需要对系统参数进行优化。参数优化是满足设计目标的一种方法,通过将设计目标参数化,采用优化方法,不断地调整设计变量,使得设计结果不断满足技术指标的最佳值。在工业和交通控制领域,国内外多使用多目标优化方法优化调整控制参数,国际期刊《世界交通轨道》2022年第二期公开的“multi-objectiveoptimizationofhigh-speedtrainsuspensionparametersforimprovinghuntingstability”阐述了悬浮系统参数的设计思路,采用多目标优化方法,通过分析得到悬浮参数的优化规律。考虑到悬浮系统非线性、不确定、快速时变的特性,多参数变化以及外界复杂扰动会带来模型不确定性,控制难度提升,从而导致悬浮控制系统控制品质下降。模型的现代控制理论通常需要受控对象数学模型精确已知,而模块的结构参数较多,且很难构建统一的目标函数进行单目标优化,设计难度大,操作复杂。
4、现有技术中,专利cn108897211a公开了一种磁浮列车的悬浮控制系统参数优化方法,旨在应用控制器进行参数优化,能够简单在线优化学习pid控制器参数,以提高对磁浮列车的悬浮控制性能。专利cn106250592a公开了一种车辆悬架参数优化设计方法,针对汽车悬架系统开发设计中现有优化算法局部收敛的问题,可以通过全局最优解选取最佳参数。这两件专利技术都对参数及其性能设计优化的研究提供了方法与思路。陈强在“超高速悬浮系统设计及其控制技术研究”中采用基于极值搜索算法的pid参数在线整定的方法进行悬浮控制器的设计,该方法可以使系统稳定运行,当系统特性发生变化,能够在线调整参数,找到局部最优参数的很小邻域,从而实现控制目标。传统的设计在优化过程中针对控制器工作的特性只考虑单个响应特性,不能实现对系统控制参数的全面优化设计。超高速超导电动悬浮系统系统是一个复杂的非线性系统,传统超导电动悬浮系统文献及专利中仅提供系统参数及设计指标计算结果,并未提供参数选取及优化设计的方案。
技术实现思路
1、本发明提供了一种电动悬浮系统电磁参数优化方法及变参数处理装置,解决了超高速超导电动悬浮系统中超导磁体及悬浮感应装置变量参数繁多,设计复杂的技术问题。通过对系统影响程度确定优化参数顺序,设计控制变量参数优化的方法,确定需要优化的目标参数,根据参数对悬浮系统的技术指标要求,通过迭代计算,在指标范围内选取最优的技术方案及超导磁体及悬浮感应板相关参数。
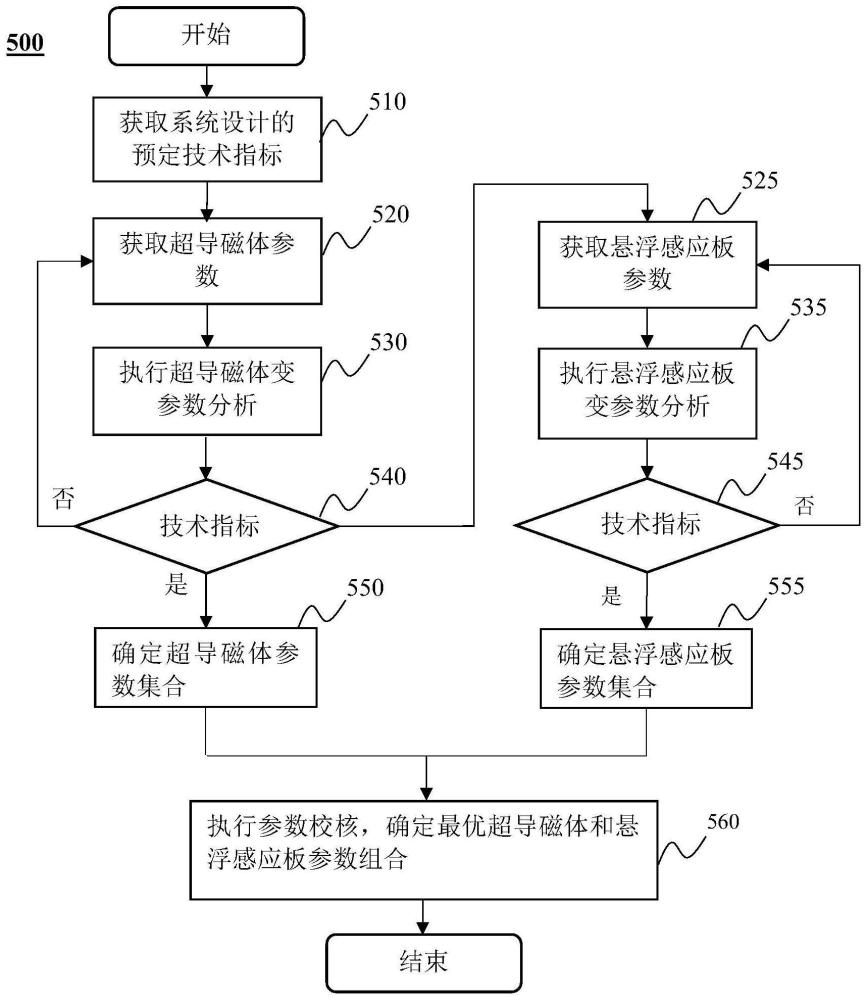
2、本发明第一方面提供了一种电动悬浮系统电磁参数优化方法。由于悬浮感应板间距变化对整个系统的悬浮刚度或导向刚度的影响比较小,因此,本方法先进行超导磁体变参数分析,在得到的超导磁体参数集合的基础上进行悬浮感应板变参数分析,这样迭代的速度会更快。具体包括:获取所述电动悬浮系统设计相关的预定技术指标;获取超导磁体参数,基于所述超导磁体参数执行超导磁体变参数分析;其中,所述超导磁体变参数分析包括:根据所述超导磁体参数与所述预定技术指标之间的关系,确定初步预测的超导磁体参数;判断所述初步预测的超导磁体参数是否符合所述预定技术指标的要求,响应于符合所述预定技术指标,执行悬浮感应板变参数分析;响应于不符合所述预定技术指标,迭代所述超导磁体变参数分析直到符合所述预定技术指标,从而得到超导磁体参数集合;获取悬浮感应板参数,基于所述悬浮感应板参数执行所述悬浮感应板变参数分析;其中,所述悬浮感应板变参数分析包括:根据所述悬浮感应板参数与所述预定技术指标之间的关系,确定初步预测的悬浮感应板参数;判断所述初步预测的悬浮感应板参数是否符合所述预定技术指标的要求,响应于符合所述预定技术指标,进行参数校核;响应于不符合所述预定技术指标,迭代所述悬浮感应板变参数分析直到符合所述预定技术指标,从而得到悬浮感应板参数集合;以及对所述超导磁体参数集合与所述悬浮感应板参数集合进行参数校核,得到最优的超导磁体参数和悬浮感应板参数组合。
3、可选地,所述悬浮感应板参数包括第一组悬浮感应板参数和第二组悬浮感应板参数,所述悬浮感应板变参数分析包括:根据所述第一组悬浮感应板参数与所述预定技术指标之间的关系,确定初步预测的第一组悬浮感应板参数;判断所述初步预测的第一组悬浮感应板参数是否符合所述预定技术指标的要求,响应于符合所述预定技术指标,进行第二组悬浮感应板参数的变参数分析并确定所述第二组悬浮感应板参数,所述第二组悬浮感应板参数包括悬浮感应板上下间距。
4、可选地,所述第一组悬浮感应板参数包括悬浮感应板高度、悬浮感应板厚度中的至少一项。
5、可选地,所述超导磁体参数包括:超导线圈长度、超导线圈高度、超导线圈边宽度、超导线圈厚度、超导线圈安匝数n和极距τ中的一个或者多个。
6、可选地,所述预定技术指标包括悬浮刚度指标、导向刚度指标、超导磁体质量指标中的至少一项。
7、可选地,所述方法进一步包括根据所述预定技术指标所要求的电磁气隙,初步确定超导磁体与悬浮感应板间距。
8、可选地,所述方法进一步包括根据所述电动悬浮系统的超导磁体质量,初步预测所述超导磁体的尺寸。
9、可选地,所述方法进一步包括根据所述电动悬浮系统的悬浮力、导向力、磁阻力指标,初步预测超导磁体的安匝数。
10、可选地,所述超导磁体变参数分析包括:根据第一技术指标控制方程对超导线圈长度、超导线圈高度、超导线圈边宽度和超导线圈厚度进行预测,所述第一技术指标控制方程如下:
11、其中,j为超导线圈电流密度,b为超导线圈三轴方向产生的磁场强度,fcz为磁阻力,fdx为导向力,fxf为悬浮力,dv为超导线圈的单元体积。
12、可选地,所述超导磁体变参数分析包括:根据第二技术指标控制方程对超导线圈安匝数n进行预测,所述第二技术指标控制方程为:
13、其中,fcz为磁阻力,fdx为导向力,fxf为悬浮力,n为超导线圈安匝数。
14、可选地,所述超导磁体变参数分析包括:根据第三技术指标控制方程对超导线圈长度进行预测,所述第三技术指标控制方程为:
15、
16、其中,fcz为磁阻力,fdx为导向力,fxf为悬浮力,为超导线圈长度。
17、可选地,所述迭代采用超松弛迭代优化方法。
18、可选地,所述迭代计算至少需要经过两次。
19、本发明第二方面提供了一种电动悬浮系统电磁参数优化装置,用于处理悬浮系统中的超导磁体及悬浮感应板参数,包括:技术指标获取模块,用于获取预定技术指标;参数获取模块,所述参数获取模块包括第一参数获取单元和第二参数获取单元;变参数分析模块,所述变参数分析模块包括第一变参数分析单元和第二变参数分析单元;判断模块,用于对所述超导磁体参数集合与所述悬浮感应板参数集合进行参数校核,从而得到最优的超导磁体参数和悬浮感应板参数组合。其中,所述第一参数获取单元,用于获取超导磁体参数;所述第一变参数分析单元,用于根据所述超导磁体参数与所述预定技术指标之间的关系,对接收到的所述超导体磁体参数进行变参数分析;响应于符合所述预定技术指标,进行悬浮感应板变参数分析,响应于不符合所述预定技术指标,迭代上述超导磁体变参数分析步骤直到符合所述预定技术指标,从而得到超导磁体参数集合;所述第二参数获取单元,用于获取悬浮感应板参数;所述第二变参数分析单元,用于根据所述悬浮感应板参数与预定技术指标之间的关系,确定悬浮感应板参数集合。
20、本发明第三方面提供了一种电子设备,包括至少一个处理器,与至少一个处理器通信连接的存储器。其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行电动悬浮系统电磁参数优化方法。
21、本发明第四方面提供了一种存储有计算机指令的非瞬时计算机可读存储介质,计算机指令用于使计算机执行上述电动悬浮系统电磁参数优化方法的步骤。
22、本发明第五方面提供了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现根据的上述电动悬浮系统电磁参数优化方法的步骤实现。
23、应该理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!