一种基于时空相关性的自适应路网交通流预测方法
1.本发明属于交通工程技术领域,具体涉及一种基于时空相关性的自适应路网交通流预测方法。
背景技术:
2.道路设施的完善、智能交通及通讯技术的发展为大量路网交通流数据的实时采集及传输提供了可能,对这些数据进行有效处理及分析、挖掘交通流参数的演变特征及规律,并在此基础上对未来交通状态进行预测对于制定科学有效的交通管理与控制措施、提升路网运行的效率与安全至关重要。
3.现有技术中主要有断面交通流预测方法及路网交通流预测方法的技术方案,首先当前的断面交通流预测方法仅考虑了交通流序列自身在时间上的相关性,而对各断面交通流之间的空间相关性则未加考虑。然后,当前的路网交通流预测大多采用神经网络、图卷积等人工智能方法,这些方法一般为“黑箱”模型,其内部作用机理不够清晰,模型可解释性受限,难以明确揭示路网交通流的时空相关规律,容易在实际工程中造成困惑,从而影响模型的推广和应用。最后,这些的交通流预测方法多为静态预测,少数为动态预测,自适应预测则更为缺乏。
4.因此,清晰地揭示路网交通流的时空相关性,在此基础上提出可解释(白箱)的路网交通流预测方法,并将自适应机制引入预测方法当中,使得模型参数可实时调整,具备自学习及动态预测能力,是当前交通流预测所欠缺的。
技术实现要素:
5.本发明针对现有技术的不足,提出一种路网时空相关系数矩阵序列建模基础上,并采用自适应方法进行求解,确保了模型参数可依据数据实时调整,具有自学习及动态预测能力的基于时空相关性的自适应路网交通流预测方法。
6.具体技术方案如下:
7.一种基于时空相关性的自适应路网交通流预测方法,具体步骤为:
8.步骤一:构建路网交通流观测矩阵;
9.步骤二:构建基于时空相关性的路网交通流预测模型;
10.步骤三:路网交通流均值预测模型的自适应求解;
11.步骤四:参数集敏感性分析;
12.步骤五:最优预测结果和最优参数集输出。
13.作为优化:所述步骤一具体为,对于含有n个检测断面的交通路网,在时间到达t-1时段时,可依据各检测器的交通流时间序列进行路网交通流观测矩阵构建:
[0014][0015]
其中,q
t-1
表示t-1时段路网交通流观测矩阵;n表示路网中的断面交通流序列数量,也即检测器数量;表示t-1时段断面(检测器)n处的交通流量值。
[0016]
作为优化:所述步骤二具体为,
[0017]
基于路网中各断面交通流序列间的时空相关性,构造路网交通流预测模型,具体地,以路网交通流观测矩阵为观测变量,将路网交通流的相关系数作为权重,采用加权法构造路网交通流预测方程,并以路网时空相关系数矩阵为状态变量,用var方法对路网交通流预测方程中的路网时空相关系数矩阵进行建模,最终,路网交通流预测方程及路网时空相关系数矩阵建模过程可分别写为:
[0018][0019][0020]
其中,表示t时段路网交通流矩阵估计结果;n表示路网中的断面交通流序列数量,也即检测器数量;表示t时段断面(检测器)n处的交通流估计值;表示t-1时段路网交通流观测矩阵;表示t-1时段断面(检测器)n处的交通流观测值;
[0021]
表示t时段滞后s阶的路网时空相关系数估计矩阵;表示在t时段滞后s阶,断面交通流序列i与j之间的标准化时空相关系数估计值;e
t
表示t时段的观测噪声矩阵;
[0022]
表示t-k时段滞后s阶的路网时空相关系数观测矩阵;ρ
t-k,s
(i,j)表示在t-k时段滞后s阶,断面交通流序列i与j之间的标准化时空相关系数观测值;s∈[0,1,
…
,d],表示不同断面交通流序列间的时间
滞后阶数;d表示不同断面交通流序列间的时间滞后阶数上限,也是路网时空相关系数矩阵的滞后阶数上限;p表示var方法的阶数;θk表示n
×
n维度状态转移矩阵;a
t
表示t时段的状态噪声矩阵;
[0023]
作为优化:所述步骤三具体为,
[0024]
3.1:先验估计及先验估计误差协方差计算
[0025][0026][0027]
其中,表示t时段滞后s阶路网时空相关系数矩阵的先验估计;表示t-k时段滞后s阶路网时空相关系数矩阵的后验估计;表示t时段的先验估计误差协方差矩阵;表示t-1时段的后验估计误差协方差矩阵;
[0028]qt
表示t时段状态过程协方差矩阵;
[0029]
3.2:观测误差计算
[0030][0031]
3.3:更新观测过程协方差矩阵
[0032][0033][0034]
其中,e
t-j+1
表示t-j+1时段的观测误差(噪声);表示平均观测误差;g
t
表示t时段的观测过程协方差矩阵;n表示自适应求解方法预设的时间窗口长度;表示t-j+1时段路网交通流观测矩阵;表示t-j+1时段的先验估计误差协方差矩阵;
[0035]
3.4:后验估计及后验估计误差协方差计算
[0036][0037][0038]
[0039]
其中,k
t
表示t时段的增益熵;i表示n维单位对角阵;表示t时段滞后s阶路网时空相关系数矩阵的后验估计;表示t时段的后验估计误差协方差矩阵;
[0040]
3.5:状态误差计算
[0041][0042]
3.6:更新状态过程协方差矩阵
[0043][0044][0045]
其中,a
t-j+1
表示t-j+1时段的状态过程误差(噪声);表示平均状态误差;表示t-j时段的后验估计误差协方差矩阵;表示t-j+1时段的后验估计误差协方差矩阵。
[0046]
作为优化:所述路网时空相关系数矩阵序列是var方法的建模对象,由各时段具有相同滞后阶数的时空相关系数矩阵进行汇集得到,各阶滞后路网时空相关系数矩阵序列表示如下:
[0047][0048]
其中:
[0049]
表示t-k时段滞后s阶的路网时空相关系数矩阵,受滚动窗口宽度v及滚动窗口内路网流量值影响;
[0050]
n表示路网中的断面交通流序列数量,也即检测器数量;
[0051]
ρ
t-k,s
(i,j)表示断面交通流序列i与j在t-k时段的滞后s阶标准化时空相关系数;
[0052]
k∈[1,2,
…
,p],p表示var方法的阶数;
[0053]
s∈[0,1,
…
,d],d表示路网时空相关系数矩阵的滞后阶数上限。
[0054]
作为优化:所述路网时空相关系数矩阵可在路网交通流观测矩阵基础上,借助滚
动窗口进行确定,时间到达t-1时段时的路网交通流观测矩阵矩阵的每行均代表一个断面的流量序列,表示t-1时段断面(检测器)n处的交通流观测值,选择滚动窗口宽度v,依据
[0055]
分别计算其滞后0阶至d阶的路网时空相关系数矩阵φ
t-1,0
,φ
t-1,1
,
…
,φ
t-1,d
:
[0056][0057]
需要说明的是,φ
t-1,0
中对角线为某断面自身交通流序列的无滞后相关系数,均为1,其他时段的各阶滞后路网时空相关系数矩阵与上述t-1时段的确定方法相同。
[0058]
作为优化:所述断面交通流序列间的标准化时空相关系数可由如下步骤计算:
[0059]
计算断面交通流序列间的时空相关系数:
[0060][0061]
其中:
[0062]
表示断面交通流序列i与j在t-k时段的滞后s阶时空相关系数;
[0063]
k∈[1,2,
…
,p],p表示var方法的阶数;
[0064]
s∈[0,1,
…
,d],d表示路网时空相关系数矩阵的滞后阶数上限;
[0065]
v表示滚动窗口宽度;
[0066]
表示r时段断面i处的交通流量观测值;
[0067][0068][0069]
对某断面交通流序列与其他各断面交通流序列间的时空相关系数进行表转化操作,也即对中的每一行进行标准化操作,各行元素的和为1,进而得到断面交通流序列间的标准化时空相关系数:
[0070][0071]
其中:
[0072]
ρ
t-k,s
(i,j)表示断面交通流序列i与j在t-k时段滞后s阶的标准化时空相关系数;
[0073]
n表示路网中的断面交通流序列数量,也即检测器数量。
[0074]
作为优化:所述步骤四具体为,所述滚动窗口宽度v、路网时空相关系数矩阵的滞后阶数上限d、var方法的阶数p及自适应求解方法预设的启动时间窗口长度n将采用敏感性分析进行择优,取预测结果相对误差均值最小时的v、d、p、n,路网交通流预测结果的相对误差均值可计算为:
[0075][0076]
其中:
[0077]
rmse表示路网交通流预测结果的相对误差均值;
[0078]
n表示路网中的断面交通流序列数量,也即检测器数量;
[0079]
表示r时段断面i处的交通流估计值;
[0080]
表示r时段断面i处的交通流量观测值。
[0081]
本发明的有益效果为:交通流预测是掌握未来路网交通运行状态的重要手段,而当前路网交通流预测大多采用神经网络、图卷积等人工智能方法,这些方法一般为“黑箱”模型,其内部作用机理不够清晰,可解释性受限,容易在实际工程中造成困惑,从而影响模型的推广和应用,且这些方法多为静态预测,少数为动态预测,而自适应预测则更为缺乏。
本发明在路网时空相关系数矩阵序列建模基础上,将自适应机制引入路网交通流预测当中,确保了模型参数可依据数据实时调整,具有自学习及动态预测能力。本发明的方法不涉及人工智能算法带来的“黑箱”问题,内部作用机理清晰,具有较好的可解释性。本发明基于时空相关性及自适应求解,实现了路网层面的交通流动态自适应预测,可为交通管理与控制措施的制定提供有效的未来路网交通运行状态数据。
附图说明
[0082]
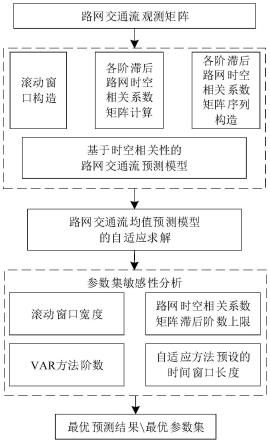
图1为基于时空相关性的自适应路网交通流预测方法流程图;
[0083]
图2为路网交通流预测模型构造流程图;
[0084]
图3为路网交通流预测模型的自适应求解流程图;
[0085]
图4为模型参数敏感性分析流程图。
具体实施方式
[0086]
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0087]
图1所示,本发明所提出的基于时空相关性的自适应路网交通流预测方法考虑了不同断面交通流序列间的时空相关性,并采用自适应机制进行实现,方法可解释性强、具备自学习及动态预测能力。该方法首先进行路网交通流观测矩阵的构建;然后,在滚动窗口构造、各阶滞后路网时空相关系数矩阵计算及各阶滞后路网时空相关系数矩阵序列构造基础上,构建基于时空相关性的路网交通流预测模型;其次,给出了所提出模型的自适应求解方法;再次,对模型中的参数集进行敏感性分析以确定最优参数组合,这些参数主要包含滚动窗口宽度、路网时空相关系数矩阵滞后阶数上限、var方法阶数及自适应求解方法预设的启动时间窗口长度;最后,输出最优的路网交通流预测结果及对应的参数集。
[0088]
1、路网交通流观测矩阵构建
[0089]
对于含有n个检测断面(检测器)的交通路网,在时间到达t-1时段时,可依据各检测器的交通流时间序列进行路网交通流观测矩阵构建:
[0090][0091]
其中,q
t-1
表示t-1时段路网交通流观测矩阵;n表示路网中的断面交通流序列数量,也即检测器数量;表示t-1时段断面(检测器)n处的交通流量值。
[0092]
2、基于时空相关性的路网交通流预测模型的构建
[0093]
如图2所示,基于时空相关性的路网交通流预测模型建立在路网交通流观测矩阵基础上,主要包含滚动窗口内任意两断面各阶滞后交通流序列间的时空相关系数计算、时空相关系数标准化、各阶滞后路网时空相关系数矩阵构造、各阶滞后路网时空相关系数矩阵序列获取及路网交通流预测模型构建五个步骤。
[0094]
进一步地,对于滚动窗口内任意两断面各阶滞后交通流序列间的时空相关系数可借助滚动窗口进行确定,时间到达t-1时段时的路网交通流观测矩阵矩阵的每行均代表一个断面(检测器)的流量序列,选择滚动窗口宽度v,依据
[0095][0096]
计算断面交通流序列间的时空相关系数:
[0097][0098]
其中:
[0099]
表示断面交通流序列i与j在t-k时段的滞后s阶时空相关系数;
[0100]
k∈[1,2,
…
,p],p表示var方法的阶数;
[0101]
s∈[0,1,
…
,d],d表示路网时空相关系数矩阵的滞后阶数上限;
[0102]
v表示滚动窗口宽度;
[0103]
表示r时段断面i处的交通流量观测值;
[0104][0105]
进一步地,对于时空相关系数标准化,也即对
[0106][0107]
中的每一行进行标准化操作(各行元素的和为1),进而得到断面交通流序列间的标准化时空相关系数:
[0108]
[0109]
其中
[0110]
ρ
t-k,s
(i,j)表示断面交通流序列i与j在t-k时段滞后s阶的标准化时空相关系数;
[0111]
n表示路网中的断面交通流序列数量,也即检测器数量。
[0112]
进一步地,对于各阶滞后路网时空相关系数矩阵构造,可由同一滞后阶数下任意两断面交通流序列间的标准化时空相关系数进行汇集得到,滞后0阶至d阶的路网时空相关系数矩阵φ
t-1,0
,φ
t-1,1
,
…
,φ
t-1,d
可表示为:
[0113][0114]
需要说明的是,φ
t-1,0
中对角线为某断面自身交通流序列的无滞后相关系数,均为1,其他时段的各阶滞后路网时空相关系数矩阵与上述t-1时段的确定方法相同。
[0115]
进一步地,进行各阶滞后路网时空相关系数矩阵序列获取,路网时空相关系数矩阵序列是var(p)方法的建模对象,由各时段具有相同滞后阶数的时空相关系数矩阵进行汇集得到,各阶滞后路网时空相关系数矩阵序列表示如下:
[0116][0117]
其中:
[0118][0119]
表示t-k时段滞后s阶的路网时空相关系数矩阵,受滚动窗口宽度v及滚动窗口内路网流量值影响;
[0120]
n表示路网中的断面交通流序列数量,也即检测器数量;
[0121]
ρ
t-k,s
(i,j)表示断面交通流序列i与j在t-k时段的滞后s阶标准化时空相关系数;
[0122]
k∈[1,2,
…
,p],p表示var方法的阶数;
[0123]
s∈[0,1,
…
,d],d表示路网时空相关系数矩阵的滞后阶数上限。
[0124]
进一步地,在路网时空相关性量化基础上,进行路网交通流预测模型构造。首先,以路网交通流观测矩阵为观测变量,将路网交通流的相关系数作为权重,采用加权法构造路网交通流预测方程。然后,对于预测方程中的路网时空相关系数矩阵,可将其视为状态变量,用var方法对不同时刻的路网时空相关系数矩阵序列进行建模,以实现其实时更新。需要说明的是,已有方法一般采用带有遗忘因子的随机游走策略来实现状态变量的建模,而本发明将依据路网时空相关系数矩阵序列的变化规律来对其进行建模,更加符合实际的状态转移机制。最终,路网交通流预测方程及路网时空相关系数矩阵建模过程可分别写为:
[0125][0126][0127]
其中,
[0128]
表示t时段路网交通流矩阵估计结果;
[0129]
n表示路网中的断面交通流序列数量,也即检测器数量;
[0130]
表示t时段断面(检测器)n处的交通流估计值;
[0131]
表示t-1时段路网交通流观测矩阵;
[0132]
表示t-1时段断面(检测器)n处的交通流观测值;
[0133]
表示t时段滞后s阶的路网时空相关系数估计矩阵;
[0134]
表示在t时段滞后s阶,断面交通流序列i与j之间的标准化时空相关系数估计值;e
t
表示t时段的观测噪声矩阵;
[0135]
表示t-k时段滞后s阶的路网时空相关系数观测矩阵;
[0136]
ρ
t-k,s
(i,j)表示在t-k时段滞后s阶,断面交通流序列i与j之间的标准化时空相关系数观测值;
[0137]
s∈[0,1,
…
,d],表示不同断面交通流序列间的时间滞后阶数;
[0138]
d表示不同断面交通流序列间的时间滞后阶数上限,也是标准化路网时空相关系数矩阵的滞后阶数上限;
[0139]
p表示var方法的阶数;
[0140]
θk表示n
×
n维度状态转移矩阵;
[0141]at
表示t时段的状态噪声矩阵。
[0142]
3、路网交通流均值预测模型的自适应求解
[0143]
当前已有交通流预测方法多为静态预测,少数为动态预测,而自适应预测则更为缺乏。因此,本发明在基于时空相关性的路网交通流预测模型基础上,将自适应机制引入路网交通流预测当中实现模型求解,使得预测过程中的参数可依据数据进行实时调整,预测方法具有自学习及动态预测能力。
[0144]
如图3所示,对于所提出的基于时空相关性的自适应路网交通流预测模型,构造如下自适应求解算法:
[0145]
step 1:先验估计及先验估计误差协方差计算
[0146][0147][0148]
step 2:观测误差(噪声)计算
[0149][0150]
step 3:更新观测过程协方差矩阵
[0151][0152][0153]
step 4:后验估计及后验估计误差协方差计算
[0154][0155][0156][0157]
step 5:状态误差(噪声)计算
[0158]
[0159]
step 6:更新状态过程协方差矩阵
[0160][0161][0162]
其中,
[0163]
表示t时段滞后s阶路网时空相关系数矩阵的先验估计;
[0164]
表示t-k时段滞后s阶路网时空相关系数矩阵的后验估计;
[0165]
表示t时段的先验估计误差协方差矩阵;
[0166]
表示t-1时段的后验估计误差协方差矩阵;
[0167]qt
表示t时段状态过程协方差矩阵;
[0168]et-j+1
表示t-j+1时段的观测误差(噪声);
[0169]
表示平均观测误差;g
t
表示t时段的观测过程协方差矩阵;
[0170]
n表示自适应求解方法预设的时间窗口长度;
[0171]
表示t-j+1时段路网交通流观测矩阵;
[0172]
表示t-j+1时段的先验估计误差协方差矩阵;
[0173]kt
表示t时段的增益熵;
[0174]
i表示n维单位对角阵;
[0175]
表示t时段滞后s阶路网时空相关系数矩阵的后验估计;
[0176]
表示t时段的后验估计误差协方差矩阵;
[0177]at-j+1
表示t-j+1时段的状态过程误差(噪声);
[0178]
表示平均状态误差;
[0179]
表示t-j时段的后验估计误差协方差矩阵;
[0180]
表示t-j+1时段的后验估计误差协方差矩阵。
[0181]
4、参数集敏感性分析
[0182]
如图4所示,本发明所提出的基于时空相关性的自适应路网交通流预测方法中,存在四个人为设置的模型参数,包含滚动窗口宽度v、路网时空相关系数矩阵的滞后阶数上限d及var方法阶数p、自适应求解方法预设的时间窗口长度n。本发明将采用路网交通流预测
结果的相对误差均值为指标,对这些参数进行敏感性分析以获取最优的参数集。路网交通流预测结果的相对误差均值为指标可计算为:
[0183][0184]
其中:
[0185]
rmse表示路网交通流预测结果的相对误差均值;
[0186]
n表示路网中的断面交通流序列数量,也即检测器数量;
[0187]
表示r时段断面(检测器)i处的交通流估计值;
[0188]
表示r时段断面(检测器)i处的交通流量值。
[0189]
5、最优预测结果\最优参数集输出
[0190]
在确定最优参数集之后,即可输出相对于的路网交通流最优预测结果,这些输出结果主要包含滚动窗口宽度v、路网时空相关系数矩阵的滞后阶数上限d及var方法阶数p、自适应求解方法预设的时间窗口长度n、各断面(检测器)在不同时段下的流量预测值路网交通流预测结果的相对误差均值rmse等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1