一种用于动目标场景的激光三维点云重构方法与流程
1.本发明涉及空间目标三维成像技术领域,特别涉及一种用于动目标场景的高密度激光三维点云重构方法。
背景技术:
2.空间目标三维重构可以对目标细节进行识别确认,是空间态势感知的重要环节。当前,空间目标三维重构主要基于立体视觉和激光雷达两种方式。激光雷达通过对目标表面反射回来的信号进行处理来获得目标的信息,其以精度高、速度快、效率高、测量目标种类多、可靠性高等优点而被广泛应用,而且不受光照制约,可以全天时工作,是空间目标信息获取的重要途径。
3.传统的激光三维重构主要采用机械扫描和闪光成像。机扫式激光雷达扫描速度慢、体积大,高分辨率工作效率低,基于该体制的激光雷达点云重构方法,如:三维点云重构方法、系统、电子设备及存储介质(专利申请号:2021100978067),无法对高速目标进行探测识别;闪光式激光雷达采用面阵探测器,对于远距离探测,为了满足信噪比要求,需要超大光学接收口径或超限供能,基于该体制的激光雷达点云重构方法,如:一种基于三维点云数据特征轻量化的点云重构方法及系统(专利申请号:2020103226397),不能满足重点空间目标远距离精细识别与感知的需求。对于空间重点目标的观测,由于多为相对速度较高、距离较远情况下工作,因此,传统激光三维重构技术不满足态势感知重点目标中远程准确识别的迫切需求。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种用于动目标场景的激光三维点云重构方法,包括基于欠采样的高分辨高密度点云数据的获取、预处理、场景重建与优化方面,以满足对远距离高速运动目标的识别需求。
5.本发明解决技术的方案是:一种用于动目标场景的激光三维点云重构方法,包括以下步骤:
6.s1、获取激光点云数据,得到动目标场景当前位置处的三维点云图像;重复上述操作,获得多个采样时刻不同位置的动目标场景三维点云图像;对三维点云图像的激光点云数据进行预处理,完成点云滤波、点云精简、点云平滑、点法向量估计处理;
7.s2、对步骤s1相邻两次采样获得的三维点云图像中的点云数据进行粗糙配准和精细配准,实现两幅采样图像的位置找正;
8.s3、提取s1中下一采样时刻的三维点云图像,重复s2,与前一次采样的图像进行配准,直到全部采样时刻的三维点云图像完成配准;
9.s4、将步骤s3配准后的点云数据采用alpha shapes算法完成点云到曲面的场景重建;
10.s5、将步骤s4场景重建后的激光点云通过三角网格孔洞修补算法对点云丢失或者
点云稀疏区域的数据完成空洞修补,完成场景重建优化。
11.进一步的,所述步骤s1采用欠采样的方式获取激光点云数据。
12.进一步的,所述激光点云数据硬件平台实现,包括:脉冲激光器、扩束光学系统、接收光学系统、空间光调制器、光电探测器、数据采集模块;空间光调制器放置在接收光学系统光路的一次焦面处;
13.基于所述硬件平台,对当前位置处的动目标场景获取激光点云数据的具体方式为:
14.以脉冲激光器作为激光光源,激光光源发射出的激光信号经扩束光学系统准直输出激光信号并入射到动目标场景上,入射的激光经过动目标场景发生散射,得到散射回波激光信号,散射回波激光信号经接收光学系统进行汇聚,在接收光学系统光路的一次焦面处汇聚的回波激光信号经空间光调制器按照预设二维编码图案进行欠采样,欠采样后的激光信号被光电探测器接收并转换为电信号输出到数据采集模块,数据采集模块输出激光回波信号的强度量化值序列;改变预设的二维编码图案,重复上述过程,连续采样q次,将得到的q个激光回波信号的强度量化值序列输入到深度分层场景恢复算法中,计算出激光点云的三维坐标数据,得到动目标场景当前位置处的三维点云图像,q>1。
15.进一步的,所述硬件平台还包括时空调制器,激光光源发射出的激光信号经过时空调制器,在时间维度进行由“0”“1”组成的时间编码,作用到激光源上,被扩束光学系统接收。
16.进一步的,步骤s1所述点云滤波采用孤点滤波或统计学滤波算法实现,滤除激光点云数据中的非数值点、无穷值点和离群点。
17.进一步的,步骤s1所述点云精简处理中使用体素化采样方法,采样点的集合作为点云平滑处理的输入。
18.进一步的,步骤s1所述点云平滑处理采用最小二乘法,滤除激光回波中噪声的干扰。
19.进一步的,步骤s1所述点法向量估计利用深度梯度算法,得到点法向量信息。
20.进一步的,步骤s2所述粗糙配准的实现方式为:以动目标场景为参考,将相邻两次采样得到的三维点云图像a和三维点云图像b分别投影到动目标场景坐标系下,所述动目标场景坐标系以场景中的目标质心为原点,以目标的运动方向为x方向,以运动轨道面的法线方向为z方向,通过右手定则确定y方向;
21.在投影重合区域中提取属于三维点云图像a的a个数据点和属于三维点云图像b的b个数据点,由点法向量估计处理得到所有提取数据点的点法向量,执行步骤:
22.p1、针对图像a中提取的每个数据点aj,判断aj的邻域是否存在b中的点,如果aj的邻域不存在b中的点,认为aj不存在配对点,j加1,重新执行步骤p1,否则,进入步骤p2;
23.p2、设匹配点对数量k的初值为0,计算得到邻域内图像b中使取值最小的点,作为aj的匹配点,k加1;
24.上式中,d1为aj到动目标场景坐标系的距离,为邻域内图像b中各点到动目标场景坐标系的距离,δ1为aj法向量在动目标场景坐标系的方向角,为
邻域内图像b中各点法向量在动目标场景坐标系的方向角;
25.p3、j加1,重新执行步骤p1~p3,直到遍历所有的j,j=1,2
…
,a;
26.p4、得到图像a和图像b经过粗糙配准后的所有的k对匹配点对,k≤a。
27.进一步的,步骤s2所述精细配准的实现方式包括步骤:
28.t1、在粗糙配准得到的k对匹配点对中任取两对进行组合,得到种组合方式;
29.t2、针对每一种组合方式,对图像b进行坐标系转换,使图像b的两个匹配点与图像a对应的两个匹配点重合;计算图像b进行坐标系转换后的其他匹配点的坐标,并确定k对匹配点对间的距离dk和法向量夹角θk,其中:重合的两对匹配点对的距离均为0;
30.t3、根据步骤t2计算出的匹配点对间的距离dk和法向量夹角θk,建立目标函数f1,计算每一种组合情况的目标函数值;
[0031][0032][0033]
其中,w1为f1中表示距离的权重,w2为f1中表示法向量夹角的权重;
[0034]
t4、更换另一种组合方式,重新执行步骤t2~t4;直到遍历所有的种组合方式;
[0035]
t5、选取出目标函数值最小的一种组合方式,保留该组合方式中的两对匹配点对作为精细配准的结果,并使用这两对匹配点实现两幅采样图像的位置找正。
[0036]
本发明与现有技术相比的有益效果是:
[0037]
(1)本发明提供了一种用于动目标场景的高密度激光三维点云重构方法,采用欠采样的方式获取激光三维点云,低于奈奎斯特采样定律要求的采样数量,并结合分层场景恢复算法获取高分辨高密度点云,能够弥补传统激光三维探测技术无法实现高速远距离目标信息获取问题。
[0038]
(2)本发明针对高分辨高密度点云数据,采用alpha shapes算法实现点云到曲面的场景重建,能够准确给出目标场景高分辨高精度信息。
附图说明
[0039]
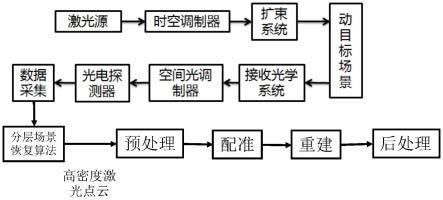
图1为本发明实施例高密度激光三维点云重构方法的原理图
[0040]
图2为本发明实施例高密度激光三维点云重构方法的点云处理流程图
具体实施方式
[0041]
下面结合附图对本发明作进一步阐述。
[0042]
本发明实施例所述方法包括如下步骤:
[0043]
s1、获取激光点云数据,得到动目标场景当前位置处的三维点云图像;重复上述操作,获得多个采样时刻不同位置的动目标场景三维点云图像;对三维点云图像的激光点云数据进行预处理,完成点云滤波、点云精简、点云平滑、点法向量估计处理;
[0044]
s2、对步骤s1相邻两次采样获得的三维点云图像中的点云数据进行粗糙配准和精细配准,实现两幅采样图像的位置找正;
[0045]
s3、提取s1中下一采样时刻的三维点云图像,重复s2,与前一次采样的图像进行配准,直到全部采样时刻的三维点云图像完成配准;
[0046]
s4、将步骤s3配准后的点云数据采用alpha shapes算法完成点云到曲面的场景重建;
[0047]
s5、将步骤s4场景重建后的激光点云通过三角网格孔洞修补算法对点云丢失或者点云稀疏区域的数据完成空洞修补,完成场景重建优化。
[0048]
如图1所示,本发明实施例采用欠采样的方式获取激光点云数据,基于的硬件平台包括:脉冲激光器、时空调制器、扩束光学系统、接收光学系统、空间光调制器、光电探测器、数据采集模块。
[0049]
其中:时空调制器和空间光调制器在使用时,工作模式选择外触发控制,外触发控制一方面给时空调制器和空间光调制器发送指令信号,每次发送的指令信号记为指令信号p,p=1,
…
,n,控制时空调制器和空间光调制器在第p种编码下工作;另一方面给数据采集模块指令信号p令其开始采集,实现时空调制器、空间光调制器与数据采集模块的同步。
[0050]
基于上述硬件平台,获取高密度激光三维点云的方法如下:激光光源选择脉冲激光器,脉冲激光器产生的发射激光经过时空调制器,在时间维度进行由“0”“1”组成的时间编码,作用到激光源上,被扩束光学系统接收,之后经扩束光学系统,准直输出激光信号;经过调制的激光经过远场传输入射到动目标场景上,动目标场景对入射的激光形成散射回波信号;散射回波信号经接收光学系统进行汇聚,在光学系统光路的一次焦面处放置空间光调制器,空间光调制器随机设置由“0”“1”组成的二维编码图案,汇聚的回波激光信号经空间光调制器按照二维编码图案进行采样,采样后的激光信号被光电探测器接收,光电探测器通过光电转换输出的电信号经数据采集模块,实现模拟信号到数字信号的转换,输出关于时间序列的激光回波信号的强度量化值序列,改变预设的二维编码图案,重复上述过程,连续采样10次,将得到的10个激光回波信号的强度量化值序列输入到深度分层场景恢复算法中,计算出激光点云的三维坐标数据,得到动目标场景当前位置处的三维点云图像。
[0051]
进一步的,所述深度分层场景恢复算法为:
[0052]
10个激光回波信号的强度量化值序列形成10个回波曲线,作为数据点,每个回波曲线峰值点处的时间乘以光速除以2得到所述硬件平台到动目标场景的多个距离值,利用谱估计算法把动目标场景根据多个距离值进行分层,得到每一层的强度值和到所述硬件平台间的距离值;之后,将空间光调制器的先验编码信息作为测量矩阵,将每一层的强度值作为测量值,利用正交匹配追踪算法omp,得到每一层数据点的二维坐标;根据每一层数据点的二维坐标和每一层到硬件平台间的距离值,得到激光点云的三维坐标数据,每一层的三维坐标形式为(xi,yi,zi)。
[0053]
深度分层场景恢复算法得到的激光点云数据(xi,yi,zi),对于单次测量,点云数量可以达到i=m3,m为空间光调制器x维度或y维度的像素数,通常x=y。深度分层场景恢复算法得到的激光点云数据作为预处理模块的输入数据。
[0054]
如图2所示,对获取的高密度三维激光点云首先进行预处理,包括点云滤波、点云精简、点云平滑处理,以及点云法向量估计。
[0055]
点云滤波可滤除三维激光点云中的非数值点、无穷值点和离群点,可以选择采用孤点滤波、统计学滤波等计算方法实现。
[0056]
本实施例中,采用统计学滤波方法,首先根据输入的高密度点云数据,计算全局密度knn,给出全局标准差或所有点的最近邻距离的标准差std,作为统计滤波方法的输入。其次,对于每一个激光点,计算与其周围knn个点的距离并求出标准差。之后,与全局标准差std比较,如果大于全局标准差,则滤除该点,如果小于全局标准差,则保留该点。
[0057]
点云精简可将一些具有重复特征的冗余点去除,达到减小数据量的目的。本实施例中,在点云精简处理中使用体素化采样的方法,先对三维空间体素化,然后在每个体素里取中心点或最靠近中心的点作为采样点,把每个体素里提取的采样点的集合作为点云平滑处理的输入。体素化后的数据可以高效的使用空间卷积,有利于提取多尺度、错层次的局部特征信息。
[0058]
采用最小二乘法进行点云平滑处理,滤除激光回波中噪声的干扰。
[0059]
点云平滑处理之后,利用深度梯度算法来近似估计点法向量,为后续点云重构算法使用;其中深度梯度算法估计点法向量的计算公式如下:
[0060][0061]
上式中,p是当前三维激光点的坐标,i为当前三维激光点p的强度,q1,
…
,qn为当前三维激光点邻域中的激光点坐标,对应强度值为i1,
…
,in;为p点梯度,v1,
…
,vn是单位方向向量。
[0062]
之后,将预处理的点云经过常规粗糙配准、精细配准和全局配准三步流程实现对多个采样时刻的运动目标图像的配准工作,以得到全视场场景信息。其中三种配准方法的原则是将不同时刻下不同视角获得的点云数据进行转换,实现动中成像。
[0063]
(1)粗糙配准实现方法为:
[0064]
根据动目标场景的成像角度,以动目标场景为参考,将相邻两次采样得到的图像a和图像b分别投影到动目标场景坐标系下,所述动目标场景坐标系以场景中的目标质心为原点,以目标的运动方向为x方向,以运动轨道面的法线方向为z方向,通过右手定则确定y方向;
[0065]
在投影重合区域中提取属于图像a的a个数据点和属于图像b的b个数据点,由点法向量估计处理得到所有提取数据点的法向量,执行步骤:
[0066]
p1、针对图像a中提取的每个数据点aj,判断aj的邻域是否存在b中的点,如果aj的邻域不存在b中的点,认为aj不存在配对点,j加1,重新执行步骤p1,否则,进入步骤p2;
[0067]
p2、设匹配点对数量k的初值为0,计算得到邻域内图像b中使取值最小的点,作为aj的匹配点,k加1;
[0068]
上式中,d1为aj到动目标场景坐标系的距离,为邻域内图像b中各点到动目标场景坐标系的距离,δ1为aj法向量在动目标场景坐标系的方向角,为邻域内图像b中各点法向量在动目标场景坐标系的方向角;
[0069]
p3、j加1,重新执行步骤p1~p3,直到遍历所有的j,j=1,2
…
,a;
[0070]
p4、得到图像a和图像b经过粗糙配准后的所有的k对匹配点对,k≤a。
[0071]
(2)精细配准实现方法包括步骤:
[0072]
t1、在粗糙配准得到的k对匹配点对中任取两对进行组合,得到种组合方式;
[0073]
t2、针对每一种组合方式,对图像b进行坐标系转换,使图像b的两个匹配点与图像a对应的两个匹配点重合;计算图像b进行坐标系转换后的其他匹配点的坐标,并重新确定k对匹配点对间的距离dk和法向量夹角θk,其中:重合的两对匹配点对的距离均为0;
[0074]
t3、根据步骤t2计算出的匹配点对间的距离dk和法向量夹角θk,建立目标函数f1,计算每一种组合情况的目标函数值;
[0075][0076][0077]
其中,w1为f1中表示距离的权重,w2为f1中表示法向量夹角的权重;
[0078]
t4、更换另一种组合方式,重新执行步骤t2~t4;遍历所有的种组合方式;
[0079]
t5、选取出目标函数值最小的一种组合方式,保留该组合方式中的两对匹配点对作为精细配准的结果。
[0080]
(3)全局配准实现方法为:
[0081]
对于不同采样时刻的动目标场景的三维点云图像,提取新的图像与前一采样时刻的图像重复粗糙配准和精细配准操作,完成全局配准。
[0082]
然后对处理好的点云数据进行三维曲面的场景重建,场景重建可采用球体旋转算法(alpha shapes)重构、泊松算法实现点云到曲面的重建。
[0083]
本实施例中采用alpha shapes算法对点云数据进行三维曲面的场景重建,使用python软件open3d模块中的create_from_point_cloud_alpha_shape()函数,将点云数据作为输入参数代入该函数,输出即为曲面重构变量。
[0084]
对于动目标场景,调节alpha值时,为保证重建效果,点云稀疏区域采用的alpha值范围取0~10;点云绸密区域采用的alpha值范围取50~100;其中绸密区域的点云密度是稀疏区域点云密度的10倍。例如,将点云密度小于5的区域视为稀疏区域,点云密度大于50的区域视为绸密区域。
[0085]
最后,通过三角网格孔洞修补算法完成空洞修补等后处理流程,完成目标三维曲面的场景重构优化。
[0086]
所述三角网格补洞算法主要采用基于领域信息不断扩张的途径,对点云丢失或者点云稀疏区域的数据完成空洞修补后处理流程。本实施例中,首先计算所有点的平均点距,之后利用点云中点的分布均匀性判断边界特征,最后基于上述信息,对空洞进行均匀修补,进而完成目标三维曲面的场景重构优化。
[0087]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1