一种变体机翼蒙皮变形重构方法、计算机存储介质及设备
本发明属于变体机翼变形测量领域,涉及一种基于内表面有限应变点测量的变体机翼蒙皮变形重构方法、计算机存储介质及设备,更具体地,涉及一种利用变体机翼蒙皮内表面离散的应变数据分区重构出固定区蒙皮变形与变形区蒙皮变形并叠加得到蒙皮全场变形的重构方法。
背景技术:
1、变体机翼是一种通过主动改变自身气动外形、气动特性,以适应不同的飞行情况的智能机翼,它使得环境适应性飞行器成为了一种可能,是未来先进飞行器的重要特征和发展方向之一。区别于传统机翼的铰链式非连续变形结构,目前变体机翼变形主要以翼型变弯度、变厚度和变扭转等中小尺度的变形为主,通过驱动机翼蒙皮的连续变形实现以较小的驱动能耗就能显著改变飞行器整体气动性能和环境适应性的目的。连续变化的蒙皮面相较于传统的铰链式分体变形,能够显著地改变飞行器的升阻比和提高燃油功耗。因此,与现有的对固定翼整体结构进行简化后的变形重构不同,蒙皮实时全场变形的高效高精感知是变体机翼能够有效控制变形量,达到精准控制飞行器气动特性的关键。
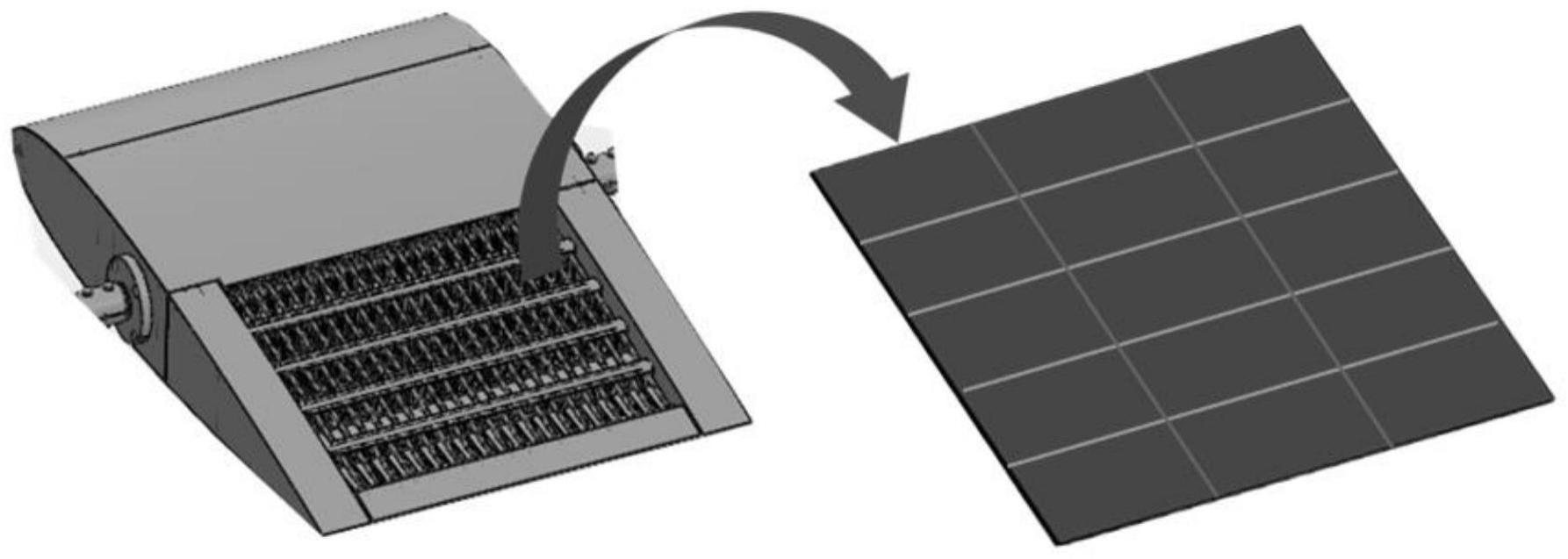
2、变体机翼蒙皮的结构、变形具有以下特点:整体的蒙皮结构可分为固定区和变形区,如图1所示,固定区蒙皮的变形与固定翼蒙皮一致,为受外载荷引起的被动变形;变形区蒙皮的变形主要为受驱动结构引起的主动变形,变形时需要满足表面切方向的弹性变形来达到所需要的变形量,而在表面法向具有更大的刚性以确保实际飞行过程中不会因外界变化的气压而影响表面流线型,因此变形区蒙皮材料一般为复合材料,且材料在切向与法向需要表现出不同的材料特性;为了实现连续变形,机翼内驱动装置密集,如图2所示,蒙皮的内表面与大量骨架接触,具有复杂的边界条件。现有变形感知方法一般会将机翼整体简化为悬臂板等结构,在分析静载变形时这样的简化可以显著减少计算量,但当考虑气动特性且重构对象为变体机翼时,变形区蒙皮的外形是飞行器调整启动性能以适应环境的关键,不能将外形简单简化。
3、变体机翼变形区蒙皮的变形特点要求重构方法能适应复杂材料特性与变形情况,且变体机翼内置的复杂驱动装置使得蒙皮内表面空间狭窄,无法满足在外表面以及大面积布置传感器的空间要求,只能采用内表面粘贴式的有限点接触式测量方式。因此,亟需开发新的基于有限点的接触式变形测量方法,将变体机翼固定区与变形区分区重构并叠加,实现蒙皮全场变形重构。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种变体机翼蒙皮变形重构方法、计算机存储介质及设备,其目的在于,解决现有技术中蒙皮重构方法难以适用于变体机翼蒙皮重构、重构结果误差较大的技术问题。
2、为实现上述目的,按照本发明的一个方面,提供了一种变体机翼蒙皮变形重构方法,包括如下步骤:
3、步骤1:根据变体机翼的主被动变形,将整体机翼蒙皮划分为固定区蒙皮与变形区蒙皮,固定区蒙皮的小变形通过化简为悬臂板进行重构,并将固定区蒙皮的重构结果作为变形区蒙皮大变形重构时的固定边界条件;
4、步骤2:根据变形区蒙皮内部的驱动骨架结构特点,将内部骨架结构化简为边界条件并放置单元节点,使单元节点与驱动骨架重合,利用单元节点的自由度来表征骨架驱动引起的变形;
5、步骤3:对变形区蒙皮进行变形仿真,以获取该结构在真实运行过程中的整体应变分布云图;
6、步骤4:根据应变云图的分布情况在应变最大值超过阈值的变形区蒙皮单元内表面布置双层应变传感器测量;
7、步骤5:在变体机翼进行自主变形时,变形区蒙皮的变形形式包含拉压变形和弯曲变形的耦合,因此将双层传感器测得的应变数据进行弯曲、拉压应变的解耦,并利用解耦得到的实测应变与节点自由度导出的理论应变构造误差泛函,取变分,得到的驻点为单元局部坐标系内的节点自由度,再通过插值方式得到变形区蒙皮的变形情况,在边界位置叠加固定区蒙皮的变形,得到变体机翼蒙皮整体结构的全场变形情况;
8、其中,单元局部坐标系内的节点自由度ue求解如下:
9、
10、上式中,ke是一个仅与单元中传感器布点位置和单元形函数有关的函数,fe是一个与单元中传感器布点位置、单元形函数和实际测量值有关的函数;bm、bb和bs分别为理论膜应变矩阵、理论曲率矩阵、理论横向剪切应变矩阵;h为蒙皮中性面和双层应变传感器中的上应变片的距离;ω为虚拟布置系数,λ为横向剪切应变惩罚系数;eε、κε分别为蒙皮中性面处的测量膜应变与测量曲率。
11、进一步地,
12、步骤2中,利用单元节点的自由度来表征骨架驱动引起的变形的方法如下:
13、根据mindlin中厚板理论构建四节点逆壳单元,每个节点分别具有沿x y z轴方向的三个平动自由度u v w和转动自由度θx θy θz,则每个节点的位移向量表示为:
14、
15、整个单元的位移向量表示为:
16、
17、上式中,上标e表示在单元内分析;下表i表示节点编号,i=1,2,3,4。
18、进一步地,
19、将单元中性面上任意一点(x,y)的膜变形通过形函数节点插值的形式表示为:
20、
21、上式中,nk,li,mi为单元插值形函数,其具体形式为:
22、
23、
24、其中,
25、
26、s,t为某一节点在局部坐标系中的等参坐标,假设单元的长宽尺寸为2a×2b则:
27、
28、则单元内任意一点(x,y,z)的理论位移表示为:
29、
30、进一步地,
31、根据一阶剪切变形理论,用式(7)的理论位移表示应变,得到单元的理论应变如下:
32、
33、
34、
35、上式中ε、κ、γ分别表示单元的线应变、曲率和切应变,下标x0、y0、xy表示x方向、y方向和xy方向,分别表示对x方向和y方向求偏导数,则e(ue)、κ(ue)、g(ue)分别表示单元中性面的理论膜应变向量、理论曲率向量和理论横向剪切应变向量。
36、进一步地,
37、
38、其中,k=i=1,2,3,4。
39、进一步地,
40、步骤5中,基于机翼变形区蒙皮内表面单元内双层应变传感器获得内表面相应位置的实测应变值:
41、
42、上式中上标+-分别表示双层应变传感器的上应变片和下应变片,其中ε0°、ε45°、ε90°表示实际测得的应变片三个方向的值,分别表示x方向和y方向的测量线应变与x y方向的测量切应变。
43、进一步地,
44、在已知双层应变传感器的间距d,蒙皮中性面和上应变片的距离h时,求得蒙皮中性面处的测量膜应变eε与测量曲率κε:
45、
46、
47、其中,上标ε表示实验测得数据。
48、进一步地,
49、构建单元理论应变与实测应变的误差泛函形式:
50、φ(ue)=ω||e(ue)-eε||2+ω||κ(ue)-κε||2+λ||g(ue)||2 (15)
51、上式中φ(ue)表示理论应变与实测应变的最小二乘关系;二范数||e(ue)-eε||2、||κ(ue)-κε||2、||g(ue)||2分别表示膜应变、曲率和横向剪切应变的理论值与实际值的最小二乘关系;ω为虚拟布置系数,当该单元内布置了应变传感器则ω=1,如果没有布置传感器,则令ω等于一个远小于0的经验值;λ为横向剪切应变惩罚系数,等于一个远小于0的经验值;
52、对式(15)求导,得到的驻点对应的ue即实际的节点自由度。
53、按照本发明的另一方面,提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现如前任一项所述的变体机翼蒙皮变形重构方法。
54、按照本发明的另一方面,提供了一种变体机翼蒙皮变形重构设备,其特征在于,包括前所述的计算机可读存储介质以及处理器,处理器用于调用和处理计算机可读存储介质中存储的计算机程序。
55、总体而言,本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
56、本发明利用双层应变传感器实现了单面粘贴传感器就能完成对蒙皮中性层弯曲、拉压应变的解耦,保证了在不影响飞行器气动特性的前提下,完成有限测点的变体机翼蒙皮实时全场重构,避免了传统解耦方式因上下对称布点不准确而造成的实验误差,降低了传感器的布置难度。
- 还没有人留言评论。精彩留言会获得点赞!