一种移动目标离散轨迹的建立方法
1.本发明涉及交通大数据领域,尤其是涉及一种移动目标离散轨迹的建立方法。
背景技术:
2.轨迹的定义和计算是交通状态检测和计算的重要基础,也是交通治理的基石。合理、准确、精炼的轨迹对于城市建设有重要意义。目前的轨迹多指具有时空特征的,通过对一个或多个移动对象运动过程采样所形成的数据信息,包括采样点位置信息、时间信息、速度等。作为大数据的一种,符合量大、实时、多样的特性,同时由于设备、存储等因素的影响。具有时空序列性、异频率采样性、数据质量低等特征。
3.有别于对固定道路的动态检测,轨迹数据通过标记个体定时采样来获取,一般包括人类活动轨迹、交通工具活动轨迹、动物活动轨迹和自然规律活动轨迹,其中交通轨迹数据分为两大类:行人移动数据和以车载gps定位器为例的各类代步工具定位装置传输的数据。
4.对于行人移动数据,近来有多篇文章针对社交媒体定位功能、手机服务、通信基站信号、信用卡、地铁公交刷卡数据等进行研究。相比于gps采样的高度独立性,刷卡数据与地铁站公交站深度联系,手机基站也自有辐射范围从而天然划分了城市空间。
5.gps数据在大数据时代更为易得,但由于异频、随机、低质量等问题,在数据挖掘前往往消耗大量精力在地图和地图匹配上,并且出于需求和处理的不同,数据挖掘成果在形式上差异很大却在结论上相似互通,且还有存储难度及存储成本高、索引效率低的问题。
6.需要说明的是,在上述背景技术部分公开的信息仅用于对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
7.本发明的目的在于解决降低城市交通轨迹的存储难度的问题,提供一种移动目标离散轨迹建立方法。
8.为实现上述目的,本发明采用以下技术方案:
9.一种移动目标离散轨迹的建立方法,包括以下步骤:
10.s1:获取城市静态数据并构建城市功能区,所述城市静态数据包括城市路网;
11.s2:根据所述城市路网提取道路中心线、获取交通点,得到拓扑路网;
12.s3:将所述城市功能区投影到所述拓扑路网上,获取连接;
13.s4:根据道路连通关系建立交通点和连接的拓扑关系,获取城市拓扑图;
14.s5:根据获取的移动目标的经纬度信息确定移动目标坐标在城市拓扑图的位置;
15.s6:基于所述移动目标的时空序列建立移动目标位置类间的拓扑连接关系,获取离散轨迹。
16.在一些实施例中,步骤s2所述交通点包含了位置信息和路段信息,由以下公式表示:
17.交通点i={类型:交通,属性:{经度i,纬度i,度}}
18.i表示第i个路口,类型表示记录拓扑点的类型,属性包括:经度、纬度、度,度表示图表示中的连接数。
19.在一些实施例中,步骤s2包括:建立栅格填充城市路网,将道路线转换成道路面之后提取连通关系获得道路中心线。
20.在一些实施例中,步骤s2包括:在所述交通点中除了道路枢纽,对千米以上的道路进行打断,确保相邻两枢纽的间隔不超过一千米,以减少交通观测盲区。
21.在一些实施例中,步骤s5中使用最近邻算法确定当前坐标在城市拓扑图的位置。
22.在一些实施例中,所述移动目标的经纬度信息由gps设备采集获取,所述最近邻算法使用基于曼哈顿距离的k近邻来计算第i个gps经纬度位置点从属,由以下公式表示:
[0023][0024]
其中,i表示gps设备采集的第i组经纬度数据,j表示拓扑点集中的第j个拓扑点。
[0025]
在一些实施例中,步骤s3所述连接包含位置信息和语义信息,由以下公式表示:
[0026]
连接j={类型:连接,属性:{经度j,纬度j,语义向量j,区域中心点j}}
[0027]
j表示第j个连接,类型表示拓扑点为连接,属性包括点经度,纬度,所对应的区域中心点,所代表的区域语义向量。
[0028]
在一些实施例中,步骤s4中,所述城市拓扑图在反映城市功能的宏观城市层以城市需求单元为基本拓扑点,以城市道路网为城市需求单元的拓扑关系;在反映交通状态的道路中观层以道路交叉口和连接为基本拓扑点,以多向道路网络为交通拓扑关系;所述宏观城市层的拓扑点与中观道路层的拓扑点相连通。
[0029]
在一些实施例中,步骤s6中以有限拓扑点的排序表示所述离散轨迹,由以下公式表示:
[0030]
轨迹
时刻1,时刻k
={拓扑点1
→
拓扑点2
→…→
拓扑点k}
[0031]
轨迹
时刻1,时刻k
表示移动目标在时刻1至时刻k之间的轨迹,拓扑点i表示在时刻i个体所处的功能点,是个体轨迹拓扑的最小观测单位,其中,i=1,2,
…
,k。
[0032]
本发明还提供一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现上述的方法的步骤。
[0033]
本发明具有如下有益效果:
[0034]
本发明通过以交通点和连接为基础在城市建立静态而普遍的通行模式,将无序低质的移动目标经纬度信息匹配到有限的静态的拓扑点上,得到一系列稳定的静态语义点的设置,能够使出行交通地图和公共交通地图呈现出相同的形式,解决打通私人出行和公共出行的数据融合壁垒的问题,从而提高索引效率;通过根据城市路网提取道路中心线、获取交通点,得到拓扑路网的设置能够简化路网的交通折点,降低储存压力及存储难度,从而降低轨迹储存成本。
[0035]
本发明实施例中的其他有益效果将在下文中进一步述及。
附图说明
[0036]
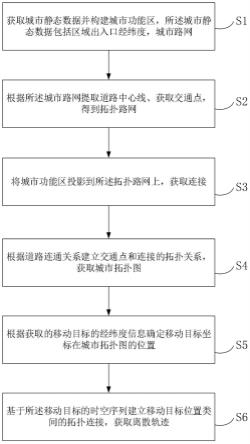
图1是本发明实施例中移动目标离散轨迹的建立方法的流程图。
具体实施方式
[0037]
以下对本发明的实施方式做详细说明。应该强调的是,下述说明仅仅是示例性的,而不是为了限制本发明的范围及其应用。
[0038]
gps数据往往用json格式存储,每条信息除了时空坐标还包含了大量无关信息,显著增加了存储难度及存储成本,并且轨迹数据挖掘时只需要提取gps数据中的时空坐标信息,在时空拓扑图的基础上进行各类交通观测,大量无关信息造成索引效率很低。因此,本发明实施例提供了一种移动目标离散轨迹的建立方法以解决问题,参考图1,本发明实施例包括如下步骤:
[0039]
s1:获取城市静态数据并构建城市功能区,所述城市静态数据包括城市路网;
[0040]
s2:根据所述城市路网提取道路中心线、获取交通点,得到拓扑路网,所述交通点为城市路网中交叉口坐标;
[0041]
s3:将城市功能区投影到所述拓扑路网上,并定义指城市功能区的投影点为连接,获取连接;
[0042]
s4:根据道路连通关系建立交通点和连接的拓扑关系,获取城市拓扑图;
[0043]
s5:根据获取的移动目标的经纬度信息确定移动目标坐标在城市拓扑图的位置,移动目标的经纬度信息包括车辆或通过行人手机得到的行人经纬度信息;
[0044]
s6:基于所述移动目标的时空序列建立移动目标位置类间的拓扑连接,拓扑连接指图拓扑图网络中的点间关系,获取离散轨迹。
[0045]
具体包括以下步骤:
[0046]
s1、获取城市区域轮廓、区域出入口经纬度,城市路网等城市静态数据构建城市功能区,区域轮廓数据和静态城市路网数据可以访问开源街景地图获得,区域出入口数据可以访问高德开放平台获得,本实施例中使用地理测绘网站下载城市建筑占地数据,进而获取建筑轮廓信息;向高德开放平台发送请求搜索建筑用地范围内的兴趣点(poi,pointsofinterest)和停车场入口的经纬度即区域出入口经纬度与名称,道路网格将建筑轮廓封装为小区,停车场出入口即小区与外界的交互处,借助兴趣点定量刻画小区的语义信息:
[0047][0048]
延续高德开放平台的兴趣点分类方法,一共有十八类建筑环境被纳入兴趣点:车辆服务、餐饮服务、购物服务、生活服务、体育休闲服务、医疗保健服务、住宿服务、商务住宅、政府机构及社会团体、科教文化服务、交通设施服务、金融保险服务、公司企业。上式每类兴趣点占全部语义的比例被表示为区域的语义向量;
[0049]
s2、提取道路中心线矢量,简化城市路网。开源街景地图(openstreetmap,osm)或其他途径可以获取城市路网,包括高速记快速路、城市主干道、城市次干道、城市支路、内部道路等;本实施例中建立栅格填充城市路网,将道路线转换成道路面之后提取连通关系获得道路中心线,具体步骤为:为所有道路建立50米的缓冲区,将前景点涂黑背景点涂白后重新导入,将城市路网从线矢量转换为面矢量,直接用地理测绘软件根据给定的宽度参数推导出位于围线内中心位置的单条线即提取道路中心线、获取交通点,得到拓扑路网;其中交
通点包含了位置信息和路段信息,由以下公式表示:
[0050]
交通点i={类型:交通,属性:{经度i,纬度i,度}}
[0051]
i表示第i个路口,类型表示记录拓扑点的类型,属性包括:经度、纬度、度,度表示图表示中的连接数;
[0052]
在本实施例中,交通点除了道路枢纽,对于千米以上的较长道路进行手动打断,确保相邻两枢纽的间隔不超过一千米,减少交通观测盲区,本实施例提取的道路中心线仅保留了主要道路、次要道路、城市干道、支路、城市小道等;
[0053]
s3、将区域出入口投影到最近邻城市路网上并定义投影点为连接。将s1推导的城市功能区投影到s2推导的拓扑路网上,若区域出入口在高德上能访问则直接用出入口代替城市功能区投影,对于缺少城市功能区出入口的小区临街道路用小区中心点向这条道路的垂足代替,其中小区是城市功能区的子集;这类投影点被称之为连接,即最近邻投影是对区域出入口坐标对周围道路做垂线,取最短的一条为出入口所连接的道路,进而定义位于道路上的投影点为连接。连接包含位置信息和语义信息,由以下公式表示:
[0054]
连接j={类型:连接,属性:{经度j,纬度j,语义向量j,区域中心点j}}
[0055]
j表示第j个连接,类型表示拓扑点为连接,属性包括点经度,纬度,所对应的区域中心点,所代表的区域语义向量;
[0056]
s4、在s2中简化的路网只含有道路矢量和道路交叉口位置信息,此步骤将s3得到的连接加入到路网中,依据道路连通关系建立交通点和连接的拓扑关系,得到重新定义的道路和路网,获取城市拓扑图:
[0057][0058]
拓扑图=(拓扑点集,边集)
[0059]
上式中边内的拓扑点,上标o表示起始交叉口,d表示终端交叉口,k表示道路中第k个连接;下标写明拓扑点的属性,包括交叉口和连接,最终城市路网表示为道路集合和拓扑点集合的组合;
[0060]
本实施例中城市拓扑图在反映城市功能的宏观城市层以城市需求单元为基本拓扑点,以城市道路网为城市需求单元的拓扑关系;在反映交通状态的道路中观层以道路交叉口和连接为基本拓扑点,以多向道路网络为交通拓扑关系;宏观城市层的拓扑点与中观道路层的拓扑点相连通。城市拓扑图在宏观层面和中观层面具有形式一致性。
[0061]
s5、对于移动目标的经纬度信息确定移动目标坐标在城市拓扑图的位置,本实施例中移动目标为车辆,经纬度信息由gps设备采集获取,用最近邻算法确定当前坐标在城市拓扑图的位置,最近邻算法使用基于曼哈顿距离的k近邻来计算第i个gps经纬度位置点从属:
[0062][0063]
式中|
·
|符号表示数绝对值或者集合元素数目,其中,i表示gps设备采集的第i组经纬度数据,j表示拓扑点集中的第j个拓扑点。确定单个gps采样位置的最近邻拓扑点后,设置阈值20m对最近邻距离进行筛选,判断此时车辆从属于节点还是道路上,实现轨迹的离
散;
[0064]
在本实施例中用最近邻算法确定当前坐标在城市拓扑图的位置,在一些实施例中也可使用其他算法;
[0065]
s6、基于所述移动目标的时空序列建立移动目标位置类间的拓扑连接,获取离散轨迹:重新排列s5得到的时空序列,得到某单位在时刻1到时刻k之间的离散轨迹为:
[0066]
轨迹
时刻1,时刻k
={拓扑点1
→
拓扑点2
→…→
拓扑点k}
[0067]
上式定义轨迹为离散且有限的拓扑点的时间排序,车辆在拓扑点之间跃迁,轨迹
时刻1,时刻k
表示移动目标在时刻1至时刻k之间的轨迹,拓扑点i(i=1,2,
…
,k)表示在时刻i个体所处的功能点,是个体轨迹拓扑的最小观测单位。
[0068]
本实施例提出了一种基于有限的语义丰富的城市拓扑点的移动目标(车辆)离散轨迹建立方法,包括:采集城市的停车场、充电站、加气站经纬度和建筑轮廓作为城市功能区,城市功能区是城市的基本需求单元,计算功能区范围内poi(兴趣点)语义向量作为功能区基本属性;采集城市道路网络主干,计算所有道路交叉点经纬度,定义各功能区出入口到道路网络的投影为连接并计算坐标,用上述步骤确定的点连接形成道路,用上述步骤确定的道路连接形成城市拓扑路网;采集行车gps时空序列数据,直接基于上述步骤确定的拓扑点对位置序列进行最近邻分析;基于gps数据的时间序列建立上述步骤确定的位置类间的拓扑连接。为打通不同形式的轨迹数据挖掘差异,降低轨迹的存储成本,提高索引效率,将车辆行驶路径从道路深入到社区,本发明实施例借鉴轨道交通中车站与车辆的拓扑关系,以交通点和连接为基础在城市建立静态而普遍的通行模式,进而将无序低质的gps采样数据匹配到有限的静态的拓扑点上。本发明实施例旨在从连续的动态的gps定位信号中抽取离散的静态的城市通行模式,打通私人出行和公共出行的数据融合壁垒,以更低的存储成本实现更高的数据挖掘效率,从而使自动驾驶、交通观测、城市规划各层次相融合的城市信息体系的建立成为可能。
[0069]
实验例:
[0070]
以杭州为例,杭州市有上城区、下城区、江干区、拱墅区、西湖区、滨江区这六个人口密度超过3000人/平方千米的核心地带,有着繁重的交通运转压力。从开源街景地图下载杭州核心地带有26659条道路,26299栋建筑,涵盖174947个交通折点,交通折点指一般矢量路网存储时的折点。经过本发明实验例的路网重构之后,所有杭州语义被压缩到2758个连接和4210个枢纽,6968个拓扑点组合成9055条拓扑边。
[0071]
以车辆vim码lb378y4w8ja183234在2021年9月6日的行程为例,每50秒长间隔采样一个点,当天gps序列有1396条记录。车辆00:00至09:03、以及17:24之后皆停留于东经120.107432
°
北纬30.245266
°
附近,14:26至14:56停留于东经120.201032
°
北纬30.296128
°
附近。利用本发明实施例的方法挖掘出该车辆的停留信息,位于东经120.107352412
°
北纬30.2461876371
°
的灵隐支二路与灵隐支路停车场被认为是车辆主要停留点,其余行程则投影到421个拓扑点顺序连接成的子图里。
[0072]
以上步骤成功将连续的gps序列转换到离散拓扑轨迹,从无序的车辆信号中抽象出了一系列稳定的静态语义点,对于交通状态观测和轨迹存储有着重要意义。
[0073]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实
施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0074]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0075]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0076]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0077]
以上内容是结合具体/优选的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,其还可以对这些已描述的实施方式做出若干替代或变型,而这些替代或变型方式都应当视为属于本发明的保护范围。在本说明书的描述中,参考术语“一种实施例”、“一些实施例”、“优选实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。尽管已经详细描述了本发明的实施例及其优点,但应当理解,在不脱离专利申请的保护范围的情况下,可以在本文中进行各种改变、替换和变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1