恒星视向速度计算方法、终端设备及存储介质
本发明涉及系外行星探测领域,特别是一种恒星视向速度计算方法、终端设备及存储介质。
背景技术:
1、视向速度法是一种新兴的系外行星探测技术。研究者利用观测光谱计算目标恒星的视向速度(radial velocity,rv),根据恒星的视向速度推测系外行星是否存在。
2、典型的视向速度计算方法是交叉相关算法(cross-correlation function,ccf)。多次移动模板光谱,计算移动后的模板光谱与观测光谱的交叉相关系数,根据交叉相关系数的变化从而求得目标恒星的rv。采用交叉相关算法计算恒星的rv可以取得较为准确的结果,但这一方案仍存在一定缺陷。第一,不同恒星之间存在差异,它们的光谱与模板光谱并非完全一致,这意味着采用交叉相关算法计算rv存在一定误差。第二,恒星表面发生活动,这会使恒星光谱发生变化,而光谱发生变化也会降低rv的计算准确度。第三,采用交叉相关算法计算恒星的rv,计算结果主要受到观测光谱的信噪比,以及模板光谱质量的影响。对目标恒星进行多次观测,由于每次的观测时间不同,无法提高各个计算结果的准确度。针对以上问题,研究者们提出了其他方案。衣振萍选取受噪声影响较小的光谱片段,利用交叉相关算法计算了m型星的视向速度。曹惠来根据若干条恒星谱线的偏移计算了目标恒星的视向速度。国外研究者设计了诸如sophie、harps、espresso等高精度光谱仪,通过提高观测光谱的质量来获取更加准确的视向速度值。
3、现有的视向速度算法仍存在一些问题。第一,对于一个光谱而言,各个波长处的流量值并不是完全独立的。换言之,在已知一个点的流量值及其不确定度后,可以帮助降低其周围流量值的不确定度。对于高分辨率光谱仪而言,每一个光谱有大量的样本点,这些数据存在一定冗余,使得对光谱数据进行处理十分繁琐。第二,通过算法生成模板光谱,或者是将高信噪比光谱作为模板光谱,无法彻底解决模板光谱与观测光谱不完全一致的问题,而这会增加最终结果的误差。第三,直接比较两个时刻的恒星光谱,无法准确求得恒星的视向速度变化值。由于恒星光谱受到恒星活动、噪声等因素的影响,直接比较两个光谱获取视向速度差会存在很大的误差,而有较大误差的视向速度差会影响对恒星视向速度变化的分析。第四,考虑到相对深度不同的吸收线蕴含有不同的视向速度信息,为了充分提取其中的信息,需要对光谱中的吸收线进行加权处理,但是在不依赖模板光谱的前提下,无法直接对恒星谱线进行赋权,需要设计合理的权重分配算法。
技术实现思路
1、本发明所要解决的技术问题是,针对现有技术不足,提供一种恒星视向速度计算方法、终端设备及存储介质,提高恒星视向速度计算的准确性,简化计算过程。
2、为解决上述技术问题,本发明所采用的技术方案是:一种恒星视向速度计算方法,包括以下步骤:
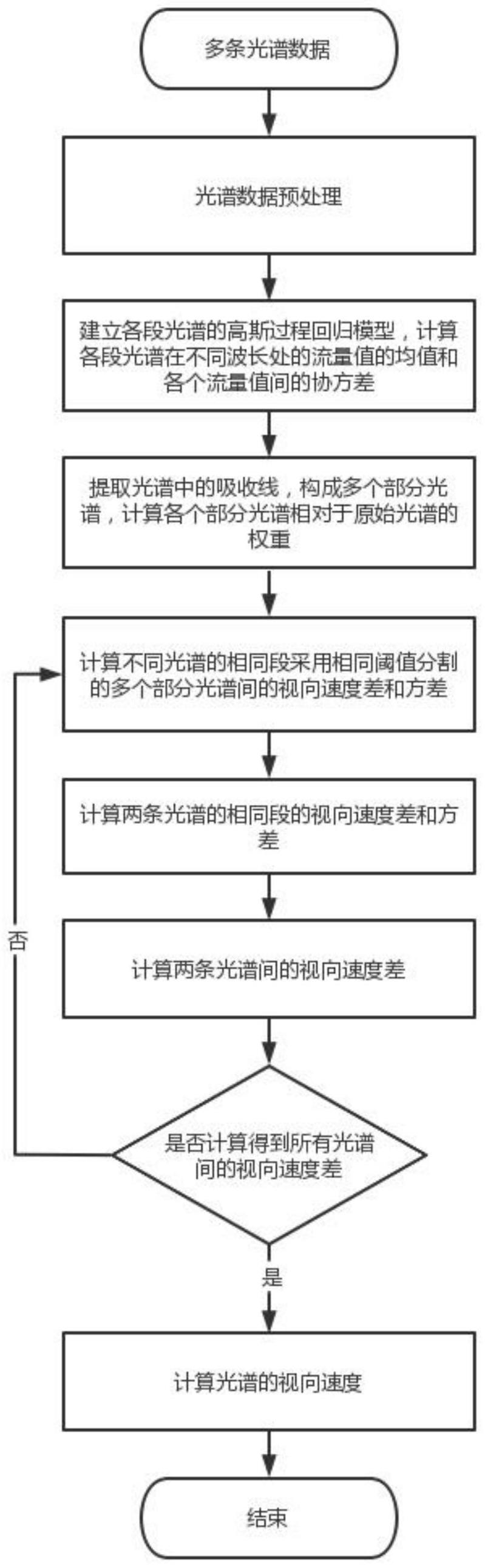
3、s1、获取s条光谱,将每一条光谱划分为t段,对每一段光谱数据进行预处理;
4、s2、利用预处理后的各段光谱数据构建各段光谱的高斯过程回归模型,计算各段光谱在不同波长处的流量值的均值以及各个流量值之间的协方差;
5、s3、根据各段光谱在不同波长处的流量值的均值提取每段光谱中的吸收线,将相对深度处于相同范围内的吸收线归为一组,构成部分光谱,计算各个部分光谱相对于原始光谱的权重;
6、s4、计算不同光谱的相同段采取相同阈值分割得到的部分光谱间的视向速度差和方差;
7、s5、重复步骤s4,利用两条光谱的相同段的多个部分光谱计算得到多个视向速度差及方差,利用步骤s3所述权重对多个视向速度差进行加权求和,计算两条光谱的相同段之间的视向速度差和方差;
8、s6、重复步骤s4~s5,根据两条光谱的多段光谱数据计算获得多个视向速度差和方差,计算两条光谱间的视向速度差;
9、s7、根据任意一条光谱与其他光谱之间的视向速度差,获得该光谱的视向速度。
10、本发明采用高斯过程回归算法处理光谱数据,降低了光谱数据的误差,得到更加准确的流量值。实现光谱建模后计算恒星在不同时刻的视向速度差,得到更加准确的结果。基于信号的周期性,利用恒星在不同时刻的视向速度差求解视向速度值,从而可以得到更加准确的恒星在不同时刻的视向速度。
11、步骤s1的具体实现过程包括:
12、计算其中,λt′表示第i条光谱的第t段的波长,f′i(λt′)表示第i条光谱的第t段的流量值,f′i(λt′)中的最小值记为f′i(λ′t)min,最大值记为f′i(λ′t)max,σ′i(λ′t)表示各个流量值的误差估计值,fi(λ′t)表示归一化后的第i条光谱的第t段的流量值,σi(λ′t)表示fi(λ′t)的误差估计值;
13、对归一化的第i条光谱的第t段进行采样,采样后的光谱波长记为λt,流量值为fi(λt),误差估计值为σi(λt)。
14、步骤s2中,对于第i条光谱的第t段,其高斯过程回归模型的构建过程如下:
15、观测光谱表示为:fi(λt)=yi(λt)+ni(λt),ni(λt)表示高斯噪声,yi(λt)形式未知,给予其高斯过程先验,即:yi(λt)~gp(mi(λt),ki(λt,λt)),fi(λt)的先验分布为:mi(λt)为均值函数,设定为0,表示对角矩阵,对角线元素为第i条光谱的第t段在各个波长处的噪声方差,ki(λt,λt)中的元素利用以下公式计算得到:
16、
17、λa表示λt中的第a个元素,λb表示λt中的第b个元素,λt是对归一化的第i条光谱的第t段进行采样后的光谱波长,h与ρ为超参数,采用最大似然估计算法针对每一段光谱计算最佳的h与ρ,对数似然函数如下所示:
18、
19、其中,d表示λt中的元素个数,令对数似然函数最大化求得最优超参数;
20、给定新的波长λ*,利用下式计算第i条光谱的第t段在λ*处流量值的均值μi(λ*),以及各个流量值之间的协方差covi(λ*,λ*):
21、
22、
23、其中,fi(λt)为对归一化的第i条光谱的第t段进行采样后的流量值。令λ*=λt,分别计算各段光谱在λt处的流量值的均值和各个流量值间的协方差。
24、步骤s3中,第i条光谱的第t段的第p个部分光谱的权重的计算公式为:
25、
26、n代表该部分光谱中的吸收线数量,z是将原始光谱中的吸收线分配到部分光谱中所设定的阈值。
27、步骤s4的计算过程如下:
28、选取第i条和第j条光谱的第t段的第p个部分光谱,对第j条光谱的第t段的第p个部分光谱进行处理,如下式所示:
29、
30、中的元素代表第j条光谱的第t段的第p个部分光谱的波长,v代表速度,c表示光速。采用最大似然估计算法计算两个部分光谱之间的视向速度差:
31、
32、
33、其中,表示两个部分光谱的波长,表示两个部分光谱的观测数据,为对角矩阵,对角线元素为两个部分光谱在各个波长处的噪声方差,n表示中的元素个数。
34、根据第i条光谱的第t段光谱和第j条光谱的第t段光谱在λt处流量值的均值和各个流量值之间的协方差生成m对模拟光谱数据,代替上述计算过程中的实际观测数据,计算得到多个视向速度差按照下式计算第i条光谱的第t段的第p个部分光谱和第j条光谱的第t段的第p个部分光谱间的视向速度差及其方差:
35、
36、
37、代表采用实际观测数据计算的视向速度差。
38、步骤s5中,第i条光谱的第t段和第j条光谱的第t段间的视向速度差δrvij(t)及其方差的计算公式如下:
39、
40、
41、为第i条光谱的第t段的第p个部分光谱的权重。
42、步骤s6中,利用下式计算第i条光谱和第j条光谱间的视向速度差δrvij:
43、
44、步骤s7中,第i条光谱的tvi计算公式为:δrvij为第i条光谱和第j条光谱间的视向速度差,s表示总的光谱数量。
45、本发明还提供了一种终端设备,包括存储器、处理器及存储在存储器上的计算机程序;所述处理器执行所述计算机程序,以实现本发明上述方法的步骤。
46、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序/指令;所述计算机程序/指令被处理器执行时实现本发明上述方法的步骤。
47、与现有技术相比,本发明所具有的有益效果为:
48、(1)本发明采用高斯过程回归算法处理光谱数据,降低光谱数据的误差,提高了δrv的计算准确度。在光谱中某个波长处的流量值与其周围的流量值并不是完全独立的。根据一个波长附近的流量值,可以帮助降低该点处流量值的误差,得到更加准确的光谱数据。采用高斯过程回归算法处理光谱数据,利用了各个流量值之间的相关性,降低了光谱数据的误差,得到更加准确的流量值,从而可以得到更加准确的恒星在不同时刻的视向速度差。
49、(2)本发明基于恒星视向速度变化的周期性计算恒星的rv,提高了rv的计算准确度。本发明基于视向速度变化的周期性,通过计算恒星在不同时刻的视向速度差,然后根据多个视向速度差计算得到恒星的rv,极大地降低了rv的误差。而且,所采用的恒星光谱数量越多,rv的误差越小。
- 还没有人留言评论。精彩留言会获得点赞!