刀闸分合状态的识别方法、装置、设备及存储介质与流程
本发明涉及电力监控,尤其涉及一种刀闸分合状态的识别方法、装置、设备及存储介质。
背景技术:
1、变电站每次进行停、送电操作后,需要对刀闸的分合状态进行确认。为了提升刀闸状态确认的准确性,而对于刀闸状态确认主要包括辅助设备确认和人工确认。
2、对于通过人工进行确认刀闸分合是否到位的方式,一方面会增加现场作业人员的工作量,另一方面也会给操作带来一定的主观性,有可能会有误判的情况发生。
3、对于利用辅助设备进行确认的方式,主要包括在刀闸装设磁感应装置和监控摄像头两种方式来实现,对于磁感应装置的装设一般需要在停电状态下进行,由于检修停电时间有限,检修工作有可能与安装此类装置存在冲突。对于监控摄像头,先通过监控摄像头获取刀闸图像,再运用图像处理技术对刀闸状态进行判断,此类方法的最大问题在于,最终结果会受到摄像头安装角度、现场光照以及后续图像处理算法的影响,考虑到现场环境的复杂、多样性,该方式的准确率难以保证。因此,考虑到确认刀闸分合状态的重要性及现场工况,很有必要提出一种适用性强、准确率高的刀闸分合状态识别技术。
技术实现思路
1、本发明的主要目的在于解决现有的刀闸分合状态检测方案,对于刀闸分合状态的识别准确度不高的问题。
2、本发明第一方面提供了一种刀闸分合状态的识别方法,所述刀闸分合状态的识别方法包括:
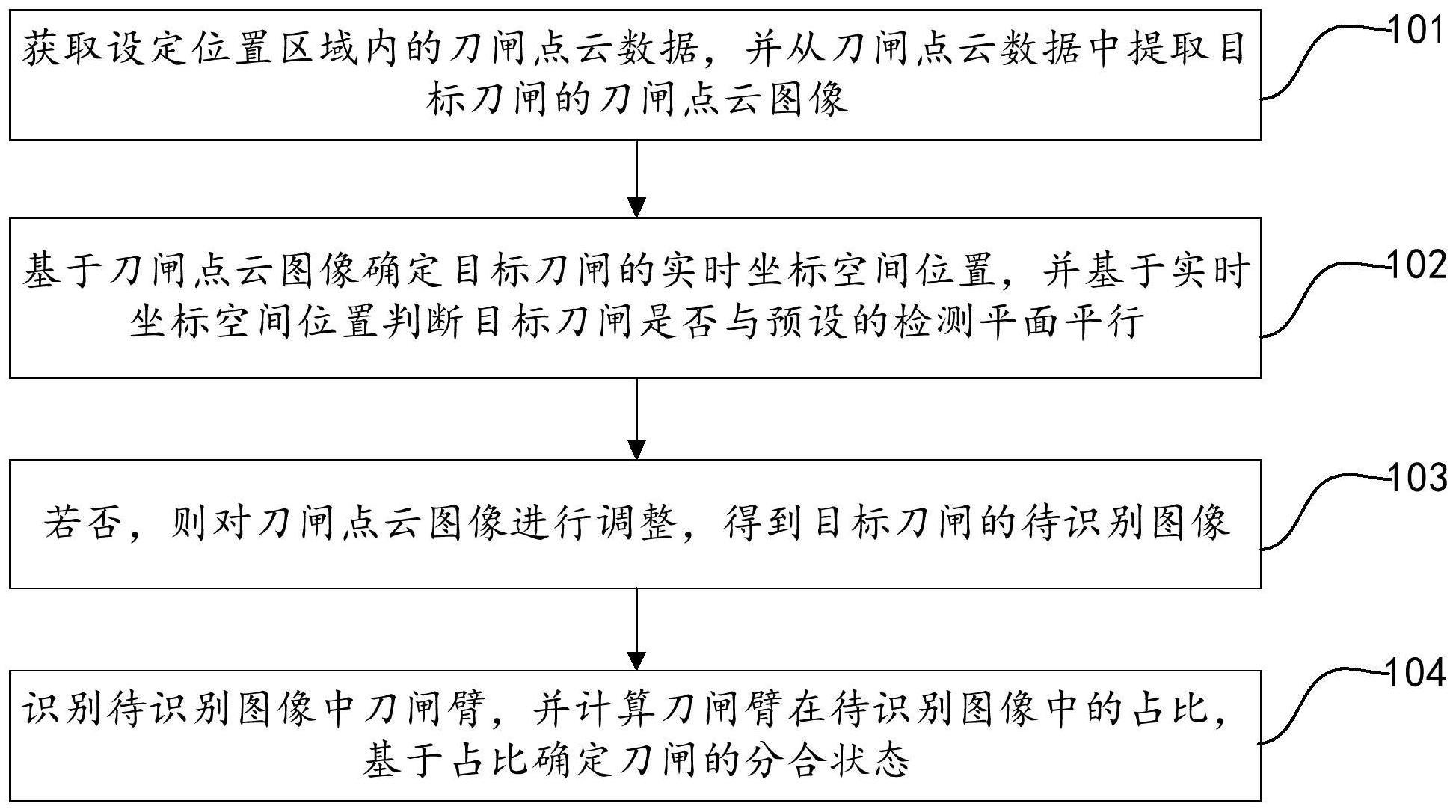
3、获取设定位置区域内的刀闸点云数据,并从所述刀闸点云数据中提取目标刀闸的刀闸点云图像;
4、基于所述刀闸点云图像确定所述目标刀闸的实时坐标空间位置,并基于所述实时坐标空间位置判断所述目标刀闸是否与预设的检测平面平行;
5、若否,则对所述刀闸点云图像进行调整,得到所述目标刀闸的待识别图像;
6、识别所述待识别图像中刀闸臂,并计算所述刀闸臂在所述待识别图像中的占比,基于所述占比确定所述刀闸的分合状态。
7、在本发明第一方面的第一种实现方式中,所述获取设定位置区域内的刀闸点云数据,并从所述刀闸点云数据中提取目标刀闸的刀闸点云图像,包括:
8、通过设于刀闸所在位置的深度相机采集设定位置区域内的刀闸点云数据,其中,所述设定位置区域包含所述刀闸的位置;
9、确定所述刀闸点云数据中的目标刀闸,并基于所述目标刀闸确定对应的安装信息,其中所述安装信息至少包括所述目标刀闸的初始坐标空间位置;
10、基于所述初始坐标空间位置确定所述刀闸点云数据中目标刀闸的位置,并提取所述位置上的点云数据,得到刀闸点云图像。
11、在本发明第一方面的第二种实现方式中,所述基于所述初始坐标空间位置确定所述刀闸点云数据中目标刀闸的位置,并提取所述位置上的点云数据,得到刀闸点云图像,包括:
12、基于所述初始坐标空间位置和所述深度相机的拍摄参数,计算出所述目标刀闸相对于所述深度相机的深度信息;
13、计算所述刀闸点云数据中各物体相对于所述深度相机的深度值,并从刀闸点云数据中剔除所述深度值不符合所述深度信息的物体的数据,得到刀闸点云图像。
14、在本发明第一方面的第三种实现方式中,在所述基于所述实时坐标空间位置判断所述目标刀闸是否与预设的检测平面平行之前,还包括:
15、利用可见光摄像头采集设定位置区域内的刀闸图像,并基于所述刀闸图像确定所述目标刀闸的图像位置信息;
16、基于所述目标刀闸的图像位置信息对所述实时坐标空间位置进行修正。
17、在本发明第一方面的第四种实现方式中,所述对所述刀闸点云图像进行调整,得到所述目标刀闸的待识别图像,包括:
18、利用所述实时坐标空间位置和所述目标刀闸的预设坐标空间位置调整所述刀闸点云图像中的目标刀闸的位置,得到所述目标刀闸的待识别图像。
19、在本发明第一方面的第五种实现方式中,所述利用所述实时坐标空间位置和所述目标刀闸的预设坐标空间位置调整所述刀闸点云图像中的目标刀闸的位置,得到所述目标刀闸的待识别图像,包括:
20、利用所述实时坐标空间位置和所述目标刀闸的预设坐标空间位置中的目标刀闸与水平面的夹角信息和目标刀闸的中点垂线与深度相机坐标系z轴的交点的位置信息,对所述刀闸点云图像中目标刀闸的位置进行坐标系变换,得到所述目标刀闸的待识别图像。
21、在本发明第一方面的第六种实现方式中,所述识别所述待识别图像中刀闸臂,并计算所述刀闸臂在所述待识别图像中的占比,包括:
22、提取所述预设坐标空间位置中的刀闸的高度信息;
23、基于所述高度信息确定所述待识别图像中待检测区域,其中所述待检测区域为刀闸臂的识别区域;
24、利用刀闸臂识别算法提取所述待检测区域中的刀闸臂图像;
25、计算所述刀闸臂图像与所述待检测区域对应的图像的占比。
26、在本发明第一方面的第七种实现方式中,所述利用刀闸臂识别算法提取所述待检测区域中的刀闸臂图像,包括:
27、利用高斯滤波算法对所述待检测区域进行图像滤波,提取目标刀闸的检测区域图像;
28、利用刀闸臂识别算法从所述检测区域图像中识别刀闸臂的图像以及位置,并对所述位置进行标记;
29、基于所述标记,利用图像分割算法分割出刀闸臂图像。
30、在本发明第一方面的第八种实现方式中,所述计算所述刀闸臂图像与所述待检测区域对应的图像的占比,包括:
31、利用图像处理技术中的腐蚀操作,对所述标记的区域内的图像进行腐蚀处理,得到所述刀闸臂的轮廓信息;
32、基于各刀闸臂的所述轮廓信息计算出所有所述刀闸臂相对于所述标记的区域的占比。
33、在本发明第一方面的第九种实现方式中,所述利用图像处理技术中的腐蚀操作,对所述标记的区域内的图像进行腐蚀处理,得到所述刀闸臂的轮廓信息,包括:
34、利用opencv自带函数对所述标记的区域内的图像进行腐蚀操作,得到刀闸臂的轮廓;
35、确定所述轮廓的边界,并基于所述边界计算所述轮廓的面积,得到所述刀闸臂的轮廓信息。
36、在本发明第一方面的第十种实现方式中,所述基于所述占比确定所述刀闸的状态,包括:
37、将所述占比与预设的刀闸状态表中各状态的刀闸臂比例进行匹配,并基于匹配的结果确定所述刀闸的分合状态;
38、或者,
39、判断所述占比是否大于预设的刀闸合位状态的最低轮廓面积比例阈值;若是,则确定所述刀闸处于合位状态;若否,则确定所述刀闸处于分位状态。
40、本发明第二方面提供了一种刀闸分合状态的识别装置,所述刀闸分合状态的识别装置包括:
41、图像采集模块,用于获取设定位置区域内的刀闸点云数据,并从所述刀闸点云数据中提取目标刀闸的刀闸点云图像;
42、图像提取模块,用于基于所述刀闸点云图像确定所述目标刀闸的实时坐标空间位置,并基于所述实时坐标空间位置判断所述目标刀闸是否与预设的检测平面平行;若否,则对所述刀闸点云图像进行调整,得到所述目标刀闸的待识别图像;
43、状态识别模块,用于识别所述待识别图像中刀闸臂,并计算所述刀闸臂在所述待识别图像中的占比,基于所述占比确定所述刀闸的分合状态。
44、在本发明第二方面的第一种实现方式中,所述图像采集模块包括:
45、点云采集单元,用于通过设于刀闸所在位置的深度相机采集设定位置区域内的刀闸点云数据,其中,所述设定位置区域包含所述刀闸的位置;
46、第一确定单元,用于确定所述刀闸点云数据中的目标刀闸,并基于所述目标刀闸确定对应的安装信息,其中所述安装信息至少包括所述目标刀闸的初始坐标空间位置;
47、第一提取单元,用于基于所述初始坐标空间位置确定所述刀闸点云数据中目标刀闸的位置,并提取所述位置上的点云数据,得到刀闸点云图像。
48、在本发明第二方面的第二种实现方式中,所述图像提取模块具体用于:
49、基于所述初始坐标空间位置和所述深度相机的拍摄参数,计算出所述目标刀闸相对于所述深度相机的深度信息;
50、计算所述刀闸点云数据中各物体相对于所述深度相机的深度值,并从刀闸点云数据中剔除所述深度值不符合所述深度信息的物体的数据,得到刀闸点云图像。
51、在本发明第二方面的第三种实现方式中,所述图像提取模块具体还用于:
52、利用可见光摄像头采集设定位置区域内的刀闸图像,并基于所述刀闸图像确定所述目标刀闸的图像位置信息;
53、基于所述目标刀闸的图像位置信息对所述实时坐标空间位置进行修正。
54、在本发明第二方面的第四种实现方式中,所述图像提取模块具体用于:
55、利用所述实时坐标空间位置和所述目标刀闸的预设坐标空间位置调整所述刀闸点云图像中的目标刀闸的位置,得到所述目标刀闸的待识别图像。
56、在本发明第二方面的第五种实现方式中,所述图像提取模块具体用于:
57、利用修正后的实时坐标空间位置和所述目标刀闸的预设坐标空间位置中的目标刀闸与水平面的夹角信息和目标刀闸的中点垂线与深度相机坐标系z轴的交点的位置信息,对所述刀闸点云图像中目标刀闸的位置进行坐标系变换,得到所述目标刀闸的待识别图像。
58、在本发明第二方面的第六种实现方式中,所述状态识别模块包括:
59、第二提取单元,用于提取所述预设坐标空间位置中的刀闸的高度信息;
60、第二确定单元,用于基于所述高度信息确定所述待识别图像中待检测区域,其中所述待检测区域为刀闸臂的识别区域;
61、第三提取单元,用于利用刀闸臂识别算法提取所述待检测区域中的刀闸臂图像;
62、计算单元,用于计算所述刀闸臂图像与所述待检测区域对应的图像的占比。
63、在本发明第二方面的第七种实现方式中,所述第三提取单元具体用于:
64、利用高斯滤波算法对所述待检测区域进行图像滤波,提取目标刀闸的检测区域图像;
65、利用刀闸臂识别算法从所述检测区域图像中识别刀闸臂的图像以及位置,并对所述位置进行标记;
66、基于所述标记,利用图像分割算法分割出刀闸臂图像。
67、在本发明第二方面的第八种实现方式中,所述计算单元具体用于:
68、利用图像处理技术中的腐蚀操作,对所述标记的区域内的图像进行腐蚀处理,得到所述刀闸臂的轮廓信息;
69、基于各刀闸臂的所述轮廓信息计算出所有所述刀闸臂相对于所述标记的区域的占比。
70、在本发明第二方面的第九种实现方式中,所述识别单元具体用于:
71、利用opencv自带函数对所述标记的区域内的图像进行腐蚀操作,得到刀闸臂的轮廓;
72、确定所述轮廓的边界,并基于所述边界计算所述轮廓的面积,得到所述刀闸臂的轮廓信息。
73、在本发明第二方面的第十种实现方式中,所述状态识别模块还包括识别单元,具体用于:
74、将所述占比与预设的刀闸状态表中各状态的刀闸臂比例进行匹配,并基于匹配的结果确定所述刀闸的分合状态;
75、或者,
76、判断所述占比是否大于预设的刀闸合位状态的最低轮廓面积比例阈值;若是,则确定所述刀闸处于合位状态;若否,则确定所述刀闸处于分位状态。
77、本发明第三方面提供了一种电子设备,包括:存储器和至少一个处理器,所述存储器中存储有指令,所述存储器和所述至少一个处理器通过线路互连;所述至少一个处理器调用所述存储器中的所述指令,以使得所述电子设备执行上述提供的刀闸分合状态的识别方法的各个步骤。
78、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述提供的刀闸分合状态的识别方法的各个步骤。
79、有益效果:
80、本发明的技术方案中,通过刀闸点云图像确定目标刀闸的实时坐标空间位置,并利用实时坐标空间位置和目标刀闸的预设坐标空间位置调整刀闸点云图像中的目标刀闸的位置,得到目标刀闸的待识别图像;识别待识别图像中刀闸臂,并计算刀闸臂在待识别图像中的占比,基于占比确定刀闸的分合状态。该方法通过获取刀闸的点云图像进行刀闸分合状态的检测,而点云图像并不会受现场环境的光照、监控设备的拍摄角度等因素的影响而导致图像不清楚等问题,并且算法识别的流程简单,解决了现有技术中对于刀闸分合状态的识别准确度不高的问题。
- 还没有人留言评论。精彩留言会获得点赞!