点云配准的方法、装置、设备及存储介质与流程
本发明涉及三维重建,尤其涉及一种点云配准的方法、装置、设备及存储介质。
背景技术:
1、激光扫描系统被广泛应用于逆向工程、三维重建等领域,为生产实践提供精确的三维数据。但由于激光扫描仪扫描范围有限,常需要对物体进行多角度扫描,通过点云数据配准将不同角度的点云数据转换到同一坐标系下,从而获取物体完整的三维轮廓模型。
2、在点云配准算法中,正态分布变换算法(normal distribution transform,ndt)和迭代最近点算法(iterative closest point,icp)最为常用,但是这两种方式对点云配准的初值要求较高,从而导致点云配准的速度较慢。
技术实现思路
1、本发明提供了一种点云配准的方法、装置、设备及存储介质,用于提高点云配准的速度。
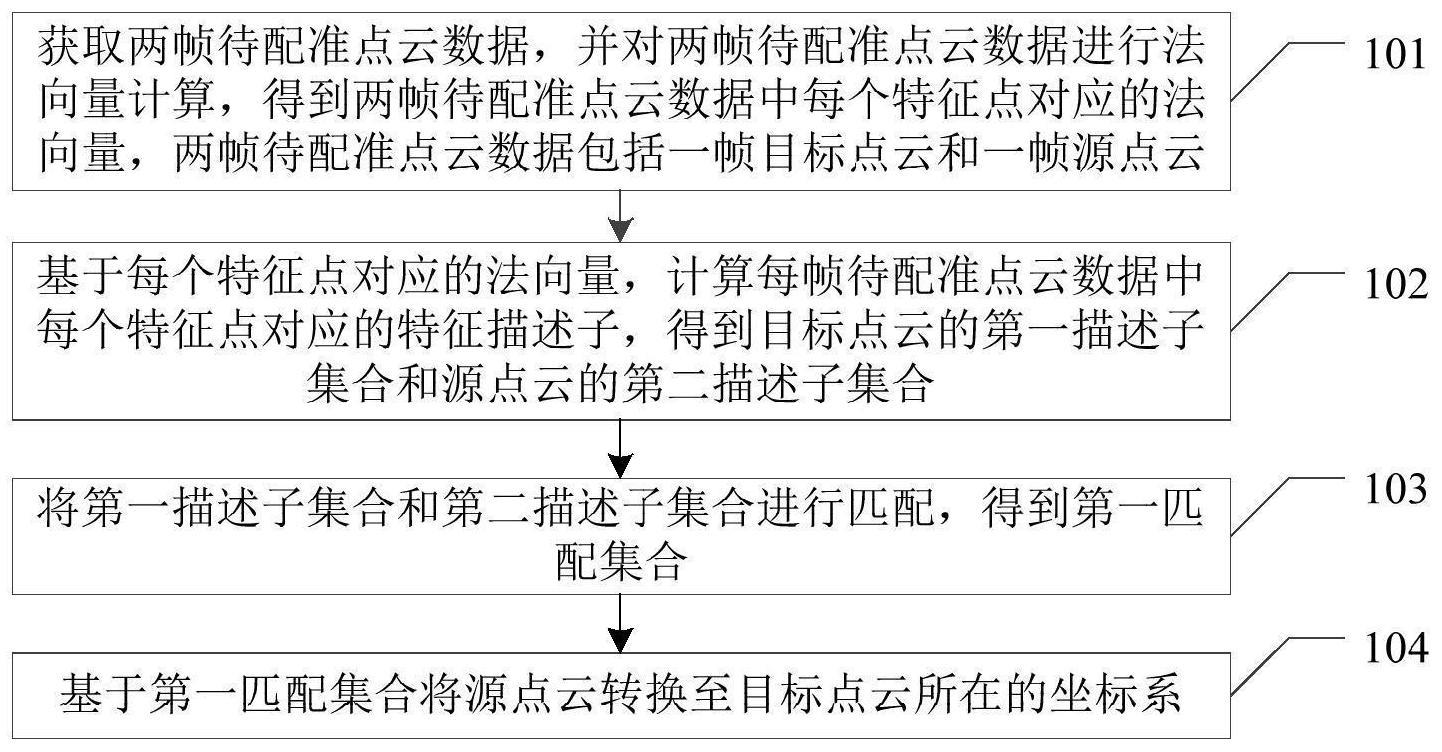
2、本发明第一方面提供了一种点云配准的方法,包括:获取两帧待配准点云数据,并对所述两帧待配准点云数据进行法向量计算,得到所述两帧待配准点云数据中每个特征点对应的法向量,所述两帧待配准点云数据包括一帧目标点云和一帧源点云;基于每个特征点对应的法向量,计算每帧待配准点云数据中每个特征点对应的特征描述子,得到所述目标点云的第一描述子集合和所述源点云的第二描述子集合;将所述第一描述子集合和所述第二描述子集合进行匹配,得到第一匹配集合;基于所述第一匹配集合将所述源点云转换至所述目标点云所在的坐标系。
3、在一种可行的实施方式中,所述获取两帧待配准点云数据,并对所述两帧待配准点云数据进行法向量计算,得到所述两帧待配准点云数据中每个特征点对应的法向量,包括:获取两帧待配准点云数据,并在所述两帧待配准点云数据中每个特征点选取第一预设半径内的多个初始近邻点,得到每个特征点对应的初始近邻点集;基于每个特征点对应的初始近邻点集进行平面拟合,生成每个特征点对应的目标平面,所述目标平面对应一个目标近邻点集;基于每个特征点对应的目标近邻点集和预设法向量算法,生成所述两帧待配准点云数据中每个特征点对应的法向量。
4、在一种可行的实施方式中,所述基于每个特征点对应的法向量,计算每帧待配准点云数据中每个特征点对应的特征描述子,得到所述目标点云的第一描述子集合和所述源点云的第二描述子集合,包括:将每个特征点对应的法向量确定为每个特征点对应的三轴坐标系其中一轴;获取每个特征点在第二预设半径内每个近邻点对应的法向量;基于每个特征点对应的三轴坐标系和对应的每个近邻点对应的法向量,生成每个近邻点对应的偏差数据;基于每个特征点的预设维度值和对应的每个近邻点的偏差数据,生成每个特征点对应的特征描述子,得到所述目标点云的第一描述子集合和所述源点云的第二描述子集合。
5、在一种可行的实施方式中,所述将所述第一描述子集合和所述第二描述子集合进行匹配,得到第一匹配集合,包括:基于所述第一描述子集合生成目标多维搜索树;计算所述第二描述子集合中每个特征描述子与所述目标多维搜索树中每个特征描述子之间的特征空间距离;将特征空间距离小于或等于预设空间距离的两个目标特征描述子确定为描述子对,并进行数量统计,得到描述子对的数量;若所述描述子对的数量大于或等于预设值,则将对应的描述子对组合为第一匹配集合;若所述描述子对的数量小于所述预设值,则生成提醒信息,所述提醒信息用于指示所述目标点云和所述源点云配准失败。
6、在一种可行的实施方式中,所述基于所述第一匹配集合将所述源点云转换至所述目标点云所在的坐标系,包括:基于所述第一匹配集合,生成目标三维刚性变换;基于所述目标三维刚性变换对所述第一匹配集合进行筛选,得到第二匹配集合;基于所述第二匹配集合,生成所述目标点云和所述源点云之间的旋转平移矩阵;基于所述旋转平移矩阵将所述源点云转换至所述目标点云所在的坐标系。
7、在一种可行的实施方式中,所述基于所述第一匹配集合,生成目标三维刚性变换,包括:在所述第一匹配集合中随机抽取预设数量的描述子对,并获取对应的三维匹配点对;基于所述预设数量的三维匹配点对进行线性求解处理,得到初始三维刚性变换;基于所述初始三维刚性变换,将所述第一匹配集合中属于所述源点云的特征描述子对应的三维匹配点变换至所述目标点云的坐标系;计算所述第一匹配集合中每对描述子对对应的三维匹配点对中两个三维匹配点之间的第一欧式空间距离;将第一欧式空间距离小于或等于阈值的三维匹配点对确定为内点匹配对,并进行数量统计,得到内点匹配对的数量;计算所述内点匹配对的数量与所述第一匹配集合对应的描述子对总数量的比值,得到目标比例;基于预设次数重复执行以上步骤,并获取所述目标比例为最高时所对应的目标三维刚性变换。
8、在一种可行的实施方式中,所述基于所述目标三维刚性变换对所述第一匹配集合进行筛选,得到第二匹配集合,包括:基于所述目标三维刚性变换,将所述第一匹配集合中属于所述源点云的特征描述子对应的三维匹配点变换至所述目标点云的坐标系;计算所述第一匹配集合中每对描述子对对应的三维匹配点对中两个三维匹配点之间的第二欧式空间距离;将第二欧式空间距离大于所述阈值的三维匹配点对确定为异常描述子对;将异常描述子对从所述第一匹配集合中去除,得到第二匹配集合。
9、在一种可行的实施方式中,所述基于所述第二匹配集合,生成所述目标点云和所述源点云之间的旋转平移矩阵,包括:获取所述第二匹配集合中每个描述子对对应的三维匹配点对,得到三维匹配点对集合;基于所述三维匹配点对集合进行线性求解处理,得到所述目标点云和所述源点云之间的旋转平移矩阵。
10、本发明第二方面提供了一种点云配准的装置,包括:获取计算模块,用于获取两帧待配准点云数据,并对所述两帧待配准点云数据进行法向量计算,得到所述两帧待配准点云数据中每个特征点对应的法向量,所述两帧待配准点云数据包括一帧目标点云和一帧源点云;特征计算模块,用于基于每个特征点对应的法向量,计算每帧待配准点云数据中每个特征点对应的特征描述子,得到所述目标点云的第一描述子集合和所述源点云的第二描述子集合;匹配模块,用于将所述第一描述子集合和所述第二描述子集合进行匹配,得到第一匹配集合;转换模块,用于基于所述第一匹配集合将所述源点云转换至所述目标点云所在的坐标系。
11、在一种可行的实施方式中,所述获取计算模块具体用于:获取两帧待配准点云数据,并在所述两帧待配准点云数据中每个特征点选取第一预设半径内的多个初始近邻点,得到每个特征点对应的初始近邻点集;基于每个特征点对应的初始近邻点集进行平面拟合,生成每个特征点对应的目标平面,所述目标平面对应一个目标近邻点集;基于每个特征点对应的目标近邻点集和预设法向量算法,生成所述两帧待配准点云数据中每个特征点对应的法向量。
12、在一种可行的实施方式中,所述特征计算模块具体用于:将每个特征点对应的法向量确定为每个特征点对应的三轴坐标系其中一轴;获取每个特征点在第二预设半径内每个近邻点对应的法向量;基于每个特征点对应的三轴坐标系和对应的每个近邻点对应的法向量,生成每个近邻点对应的偏差数据;基于每个特征点的预设维度值和对应的每个近邻点的偏差数据,生成每个特征点对应的特征描述子,得到所述目标点云的第一描述子集合和所述源点云的第二描述子集合。
13、在一种可行的实施方式中,所述匹配模块具体用于:基于所述第一描述子集合生成目标多维搜索树;计算所述第二描述子集合中每个特征描述子与所述目标多维搜索树中每个特征描述子之间的特征空间距离;将特征空间距离小于或等于预设空间距离的两个目标特征描述子确定为描述子对,并进行数量统计,得到描述子对的数量;若所述描述子对的数量大于或等于预设值,则将对应的描述子对组合为第一匹配集合;若所述描述子对的数量小于所述预设值,则生成提醒信息,所述提醒信息用于指示所述目标点云和所述源点云配准失败。
14、在一种可行的实施方式中,所述转换模块包括:第一生成单元,用于基于所述第一匹配集合,生成目标三维刚性变换;筛选单元,用于基于所述目标三维刚性变换对所述第一匹配集合进行筛选,得到第二匹配集合;第二生成单元,用于基于所述第二匹配集合,生成所述目标点云和所述源点云之间的旋转平移矩阵;转换单元,用于基于所述旋转平移矩阵将所述源点云转换至所述目标点云所在的坐标系。
15、在一种可行的实施方式中,所述第一生成单元具体用于:在所述第一匹配集合中随机抽取预设数量的描述子对,并获取对应的三维匹配点对;基于所述预设数量的三维匹配点对进行线性求解处理,得到初始三维刚性变换;基于所述初始三维刚性变换,将所述第一匹配集合中属于所述源点云的特征描述子对应的三维匹配点变换至所述目标点云的坐标系;计算所述第一匹配集合中每对描述子对对应的三维匹配点对中两个三维匹配点之间的第一欧式空间距离;将第一欧式空间距离小于或等于阈值的三维匹配点对确定为内点匹配对,并进行数量统计,得到内点匹配对的数量;计算所述内点匹配对的数量与所述第一匹配集合对应的描述子对总数量的比值,得到目标比例;基于预设次数重复执行以上步骤,并获取所述目标比例为最高时所对应的目标三维刚性变换。
16、在一种可行的实施方式中,所述筛选单元具体用于:基于所述目标三维刚性变换,将所述第一匹配集合中属于所述源点云的特征描述子对应的三维匹配点变换至所述目标点云的坐标系;计算所述第一匹配集合中每对描述子对对应的三维匹配点对中两个三维匹配点之间的第二欧式空间距离;将第二欧式空间距离大于所述阈值的三维匹配点对确定为异常描述子对;将异常描述子对从所述第一匹配集合中去除,得到第二匹配集合。
17、在一种可行的实施方式中,所述第二生成单元具体用于:获取所述第二匹配集合中每个描述子对对应的三维匹配点对,得到三维匹配点对集合;基于所述三维匹配点对集合进行线性求解处理,得到所述目标点云和所述源点云之间的旋转平移矩阵。
18、本发明第三方面提供了一种点云配准的设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述点云配准的设备执行上述的点云配准的方法。
19、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的点云配准的方法。
20、本发明提供的技术方案中,获取两帧待配准点云数据,并对两帧待配准点云数据进行法向量计算,得到两帧待配准点云数据中每个特征点对应的法向量,两帧待配准点云数据包括一帧目标点云和一帧源点云;基于每个特征点对应的法向量,计算每帧待配准点云数据中每个特征点对应的特征描述子,得到目标点云的第一描述子集合和源点云的第二描述子集合;将第一描述子集合和第二描述子集合进行匹配,得到第一匹配集合;基于第一匹配集合将源点云转换至目标点云所在的坐标系。本发明实施例中,通过对两帧待配准点云数据进行法向量计算、特征描述子计算和匹配,将源点云转换至目标点云所在的坐标系,降低了对配准初值的精度依赖,对于配准初值较差的点云数据可以得到更好的配准效果,提高了点云配准的鲁棒性,提高了点云配准的速度。
- 还没有人留言评论。精彩留言会获得点赞!