一种适于电力运维的智能体目标物抵近运动检测方法与流程
本发明涉及一种适于电力运维的智能体目标物抵近运动检测方法。
背景技术:
1、随着智能机器人技术的发展,野外电力作业广泛采用集群智能体协同作业的方式,在作业的安全性、便捷性和作业范围等多方面具有显著优势。然而,随着智能体使用数量的不断增加以及使用场景的复杂性,通过地图构建、路径规划等技术策略难以实现准确的避碰,存在距离探测的准确率低,避碰效率低的问题,常出现智能体间碰撞,造成严重的事故,这为智能体集群作业带来了风险。
2、大量的生物学研究发现,蝇视觉具有典型的红外敏感特性,并且通过便捷的神经信息处理,能够在瞬间检测出抵近目标物并对可能出现的碰撞行为做出响应,实现实时的避碰。
3、在蝇类视觉提供了启发后,提出了一种适于电力运维的智能体目标物抵近运动检测方法。
技术实现思路
1、本发明的目的在于提供一种适于电力运维的智能体目标物抵近运动检测方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种客户侧变配电室红外成像自动监测方法,包括以下步骤:
3、步骤(s1)、通过近红外成像模拟蝇视觉的红外敏感性,获取邻域中智能体目标成像信息;
4、步骤(s2)、构建仿生神经敏感性模型;
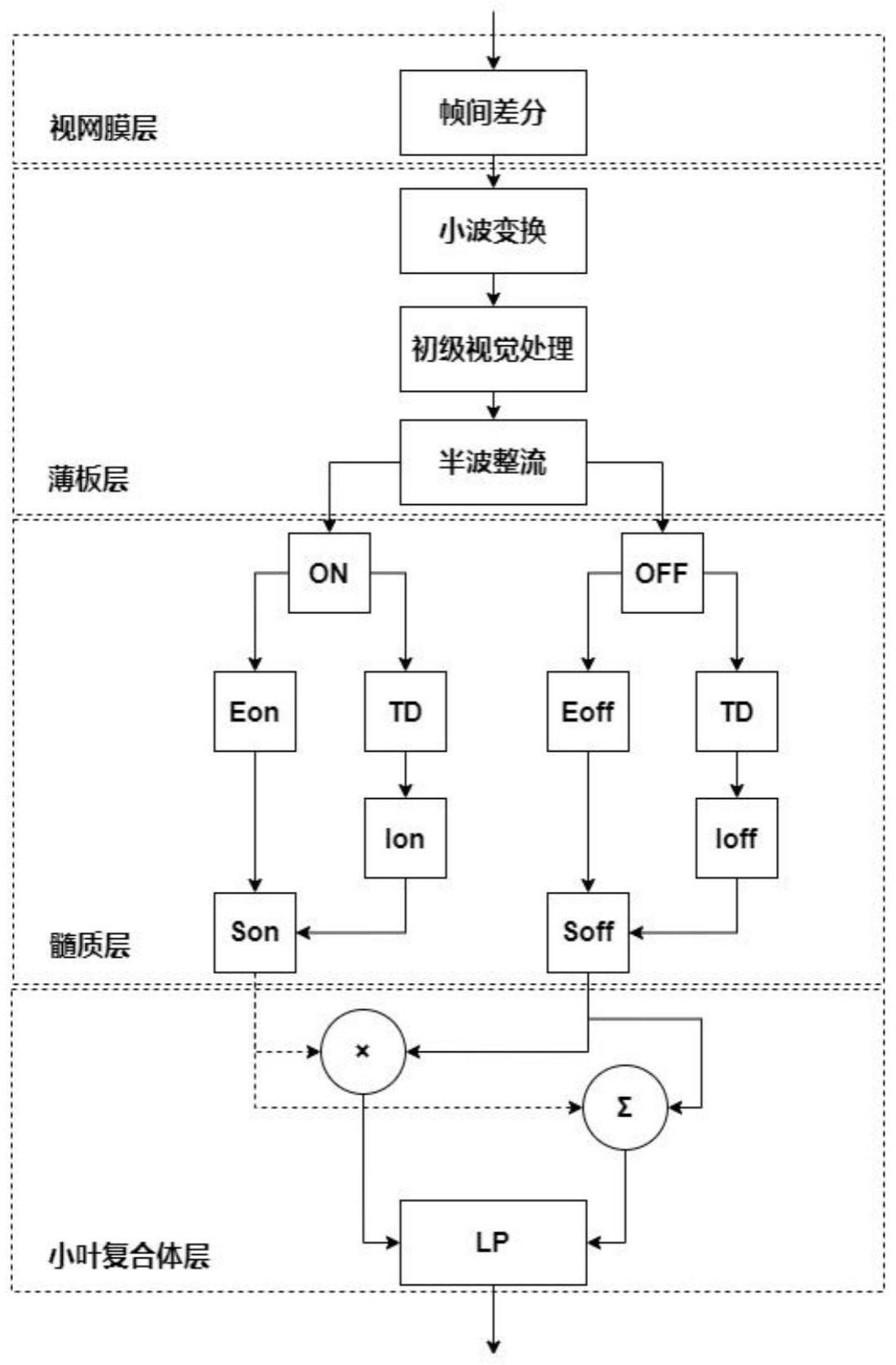
5、步骤(s3)模拟视网膜层、薄板层、髓质层、小叶复合体层四个层级的神经活动,以探测目标的抵近运动;
6、步骤(s4)、当目标抵近运动的变化超过阈值时,发出预警,防止智能体间碰撞。
7、优选的,所述步骤(s3)中,视网膜层、薄板层、髓质层、小叶复合体层四个层级的神经活动如下:视网膜层检测亮度变化信息并传递给下一层;薄板层通过小波变换和生物似然空间机制实现低频子图提取和滤波去噪,并输入on/off通道;髓质层实现不对称侧抑制处理,中央复合体通过对on和off通道的输出进行整合,判断是否存在目标的抵近运动。
8、优选的,所述步骤(s3)中,视网膜层具体活动如下:
9、视网膜层:视网膜层每个感光细胞p检测外部亮度信息的变化,即近红外图像中像素点灰度值的变化,产生膜电位,如下式所示:
10、
11、ai=(1+ei)-1 (2)
12、其中,(x,y)代表近红外图像像素点坐标,p(x,y,t)为t时刻亮度变化所产生的膜电位,l(x,y,t)表示t时刻像素点的灰度值,l(x,y,t)表示t-1时刻像素点的灰度值,为前np帧对当前时刻的影响,np为延迟的帧数[0,2],ai为衰减系数,(1+ei)-1为邻域细胞对中心细胞的影响因子。
13、优选的,所述步骤(s3)中,薄板层具体活动如下:
14、薄板层:视网膜将运动信息p(x,y,t)输入on/off通道中,具体步骤如下:
15、
16、
17、
18、
19、其中,pl(x-u,y-v,t)为将p(x,y,t)特征图经过二维小波变换获得的低频子图,(u,v)为邻域坐标,pe(x,y,t)代表(x,y)处中心正高斯的兴奋信号,兴奋信号的高斯函数,为抑制信号的高斯函数,pi(x,y,t)代表周围负高斯的抑制信号;σi和σe分别表示抑制信号和兴奋信号的标准差;
20、随后,采用半波整流对on/off通道信号进行处理,如下式所示:
21、
22、其中,pon(x,y,t)和poff(x,y,t)分别为on和off通道中的信号。
23、优选的,所述步骤(s3)中,髓质层具体活动如下:
24、在on通道中:pon(x,y,t)信号传入eon(x,y,t)单元作为兴奋信号;pon(x,y,t)信号经过一个延迟单元输入ion(x,y,t)单元产生抑制信号,定义为:
25、eon(x,y,t)=pon(x,y,t) (8)
26、
27、下述,w1为卷积内核:
28、
29、on通道中的局部兴奋信号和抑制信号通过侧抑制计算产生响应son(x,y,t):
30、yon(x,y,t)=eon(x,y,t)-ion(x,y,t)·w1 (11)
31、
32、其中,w1是on通道内控制抑制流强度的局部偏差;
33、在off通道中:poff(x,y,t)信号传入eoff(x,y,t)单元作为兴奋信号;但poff(x,y,t)信号经过一个延迟单元输入ioff(x,y,t)单元产生抑制信号,定义为:
34、eoff(x,y,t)=poff(x,y,t) (13)
35、
36、其中,w2为卷积内核,
37、
38、off通道中的局部兴奋信号和抑制信号通过侧抑制计算产生响应soff(x,y,t):
39、yoff(x,y,t)=eoff(x,y,t)-ioff(x,y,t)·w2 (16)
40、
41、其中,w2是off通道内控制抑制流强度的局部偏差。
42、优选的,所述步骤(s3)中,小叶复合体层具体活动如下:
43、on和off通道的信号在小叶复合体层汇聚,它们之间存在相互作用,小叶复合体整合所有的局部兴奋产生全局膜电位:
44、s(x,y,t)=θ1·son(x,y,t)+θ2·soff(x,y,t)+son(x,y,t)·soff(x,y,t) (18)
45、其中,θ1、θ2为调制系数;s(x,y,t)为on和off通道的信号在小叶复合体层汇聚结果,
46、
47、其中,lp(x,y,t)为局部膜电位,wg表示均值滤波的卷积核:
48、
49、
50、
51、其中,c和r代表二维图像的行和列,为阈值,表示小叶复合体中碰撞感知神经元的全局膜电位,为滤波后的局部膜电位,为t时刻的全局膜电位。
52、优选的,所述步骤(s4)中,当目标抵近运动的变化超过阈值时,发出预警,防止智能体间碰撞,包括以下步骤:
53、将全局膜电位为作为输入,代入激活函数f(t)中进行归一化:
54、
55、设置阈值ts,若激活函数的输出值大于ts,典型值(0.5<ts<1)则表示有目标靠近,发出预警;否则表示没有目标靠近;
56、
57、优选的,所述步骤(s1)中,近红外成像的成像波长为780nm~1100nm。
58、与现有技术相比,本发明的优点与好处:
59、通过模拟转化蝇视觉的功能优势,探测目标的抵近运动;当目标抵近运动的变化超过阈值时,发出预警,防止智能体间碰撞;本发明能够普适于复杂电力作业场景,实现智能体间的主动探测和避碰;不依赖于先验的地图构建和路径规划;不依赖于数据驱动的机器学习策略,对新颖的陌生环境具有适应能力;避碰的准确率高,效率高。
- 还没有人留言评论。精彩留言会获得点赞!