一种基于图像的污水等级识别方法和装置与流程
1.本发明实施例涉及领域基于图像处理的污水治理领域,特别涉及一种基于图像的污水等级识别方法和装置。
背景技术:
2.随着工业化水平的进一步提高,工业废弃物对环境的污染逐渐引起了重视,其中,工业污水是工厂排放的重要监管对象之一,大量工业污水经处理后排放至自然环境中,若工业污水不符合标准,将对自然环境和周围人群的身体健康产生极大的影响。通常来说,工业污水成分复杂,为对其进行监管,现有技术通常从工业污水内的微生物数量、酸碱度进行识别以评价工业污水是否符合排放标准。然而,通过微生物数量对工业污水进行评价需要预先进行微生物标记,才能对微生物进行准确识别,识别效果依赖于人工标准或预先输入的微生物模板,且因工业污水浑浊不清,微生物识别难度高、准确度低、计算量大;从酸碱度对工业污水进行评价仅能满足会发生酸碱度变化的特定工业污水的监管需求,难以普及和使用。因此,上述污水识别方式识别角度较少,从而导致识别准确度低,算法复杂性高,识别过程计算量大。
3.随着图像处理技术的进一步发展,污水图像对污水污染等级进行识别简化了污水识别的方式。现有技术在对工业污水进行评估时,通常直接对工业污水整体进行检测,例如对工业污水整体进行透光性、颜色识别,以评估工业污水是否符合排放标准。然而,工业污水排放后大多呈静置状态,而工业污水静置后通常分为上清液、泥水混合层和污泥,对于符合排放标准的工业污水,不同层呈现不同性状,采用统一标准评价工业污水整体一方面不符合工业污水实际状态,仅能在浑浊状态下对工业污水进行识别,另一方面仅识别某一层的性状以评价工业污水准确度较低。因此,现有技术中的工业污水未能全面评价污水性状,评价准确性低,且算法计算量大,识别难度大。
4.因此,亟需一种全面、准确、快速的污水等级识别方法和装置。
技术实现要素:
5.本发明实施方式的目的在于提供一种从污水各个角度全面识别污水等级,同时计算量较低、计算复杂度低的识别方法和装置。
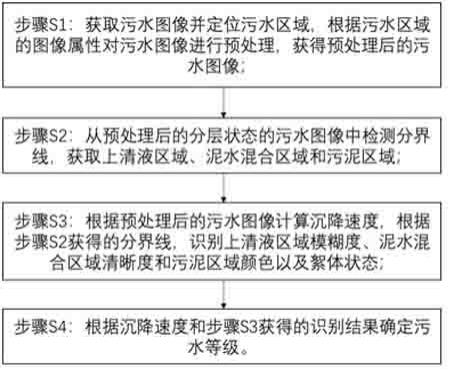
6.为解决上述技术问题,本发明的实施方式提供了一种基于图像的污水等级识别方法具体包括:步骤s1:获取污水图像并定位污水区域,根据污水区域的图像属性对污水图像进行预处理,获得预处理后的污水图像;步骤s2:从预处理后的分层状态的污水图像中检测分界线,获取上清液区域、泥水混合区域和污泥区域;步骤s3:根据预处理后的污水图像计算沉降速度,根据步骤s2获得的分界线,识别上清液区域模糊度、泥水混合区域清晰度和污泥区域颜色以及絮体状态;
其中,上清液区域模糊度由上清液中杂点数量和上清液模糊度确定,根据马氏距离计算上清液中杂点数量,根据上清液像素点灰度变化量确定上清液模糊度;获取泥水混合区域厚度信息和泥水分界线,根据厚度信息与混合物厚度阈值的关系以及泥水分界线的偏离情况确定泥水混合区清晰度;步骤s4:根据沉降速度和步骤s3获得的识别结果确定污水等级。
7.优选的,根据污水区域的图像属性对污水图像进行预处理,具体包括:污水图像包括浑浊状态下的污水图像和分层后的污水图像,选择分层后的污水图像,对分层后的污水图像的污水区域进行直方图均衡化处理;选择浑浊状态下的污水图像,调整浑浊状态下污水图像中污水区域的亮度至污水最优亮度阈值;对所有污水图像进行仿射变换和透视变换。
8.优选的,从预处理后的分层状态的污水图像中检测分界线,具体包括:根据污水区域高度计算纹理分割单元尺寸,利用纹理分割定位泥水分界线区域和上清液与泥水混合层分界线区域,在泥水分界线区域和上清液与泥水混合层分界线区域中利用边缘检测算子计算泥水分界线和上清液与泥水混合层分界线。
9.优选的,根据污水区域高度计算纹理分割单元尺寸,具体包括:在污泥区域内,各分割周期的纹理分割的高度为,其中h为容器内污水区域高度,a为与污水类型对应的污泥厚度预设系数,b为指数底,0《b《1,i表示第i个纹理计算周期,m表示平移系数;在泥水混合区域中,纹理分割的高度为容器内污水区域高度与污水类型对应的混合区域厚度预设系数的乘积。
10.优选的,步骤s3具体包括:选择浑浊状态下和分层状态下的预处理后的污水图像,获得第一图像和第二图像;获取第一、第二图像的采集时间,计算采集时间差;根据第二图像计算污泥高度,根据分层状态下污泥高度和混沌状态下污水高度比、以及第一、第二图像采集时间差计算沉降比,根据沉降比计算污泥指数,以识别沉降速度。
11.优选的,步骤s3具体包括:根据上清液类型设置上清液阈值,计算上清液中的杂点数量和模糊度,根据上清液阈值、杂点数量和模糊度识别上清液等级;其中,上清液阈值包括清澈状态下杂点数量阈值和模糊度阈值;获取上清液特征图,计算特征点的马氏距离,若马氏具体大于距离阈值,则特征点为杂点,统计上清液特征图中的杂点数量;计算上清液区域像素点的灰度变化量,以灰度变化量的倒数作为上清液模糊度。
12.优选的,计算上清液区域像素点的灰度变化量,具体包括:根据brenner梯度函数计算灰度变化量,根据上清液高度划分第一区域和第二区域,计算第一区域中水平方向和竖直方向像素点灰度差,以获得第一区域灰度变化量;计算
第二区域中水平方向像素点灰度差以获得第二区域的灰度变化量;以两个区域的灰度变化量之和作为上清液灰度变化量;第一区域自上清液顶面开始,高度为k3*h
上
,k3为清澈高度占比,h
上
为上清液高度,上清液中除第一区域外的其他区域为第二区域,上清液灰度变化量为:,其中,d(f)为上清液灰度变化量,、分别为第一区域和第二区域,(x,y)表示像素点坐标位置,f(x,y)、f(x+2,y)、f(x,y+2)、f(x+1,y)分别表示对应像素点的灰度值。
13.优选的,计算上清液区域像素点的灰度变化量,具体包括:计算上清液中心区域垂直方向各像素点灰度值,根据各像素点灰度变化梯度划分灰度区域,分别计算各灰度区域的灰度均值,计算各个灰度区域内像素点灰度值与区域的灰度均值之间的灰度差,以计算整个上清液的灰度变化量;在垂直上清液平面方向上选择上清液中心的各个像素点,计算各个像素点灰度值,计算相邻像素点灰度值变化率,若变化率大于灰度变化阈值,则划分灰度区域,遍历垂直方向上中心的各个像素点灰度值,获得多个灰度区域,上清液灰度变化量为:其中:其中,d(f)为上清液灰度变化量,j表示划分后的灰度区域数量,表示第j个灰度区域,(x,y)表示像素点坐标位置,f(x,y)表示像素点的灰度值,表示第j个灰度区域的灰度均值。
14.优选的,步骤s3具体包括:根据不同等级的污泥状态设置污泥标准颜色,计算污泥区域像素点的核心颜色值,对比污泥标准颜色和污泥区域像素点核心颜色值,识别污泥区域颜色;获取包含絮体特征的污泥图像,构建絮体识别模型,利用絮体识别模型识别污泥图像的絮体状态;絮体识别模型包括多个串行连接的第一卷积层,卷积层获得的特征输入至cbam层,cbam连接和多个第二卷积层,多个第二卷积层以上一层的输出特征为输入,多个第二卷积层将特征同时输出至下一层和分类识别层,多个第二卷积层输出连接至直方图层,直方图层输出连接至分类识别层。
15.本发明还提供一种基于图像的污水等级识别装置,包括:图像获取和预处理模块,用于获取污水图像并定位污水区域,根据污水区域的图像属性对污水图像进行预处理,获得预处理后的污水图像;分层检测模块,用于从预处理后的分层状态的污水图像中检测分界线,获取上清液区域、泥水混合区域和污泥区域;污水评价模块,用于根据预处理后的污水图像计算沉降速度,根据分层检测模块获得的分界线,识别上清液区域模糊度、泥水混合区域清晰度和污泥区域颜色以及絮体状
态;其中,上清液区域模糊度由上清液中杂点数量和上清液模糊度确定,根据马氏距离计算上清液中杂点数量,根据上清液像素点灰度变化量确定上清液模糊度;获取泥水混合区域厚度信息和泥水分界线,根据厚度信息与混合物厚度阈值的关系以及泥水分界线的偏离情况确定泥水混合区清晰度;污水等级确定模块,用于根据沉降速度和污水评价模块获得的识别结果确定污水等级。
16.本发明实施方式相对于现有技术而言,本发明提供的基于图像的污水等级识别方法和装置,一方面以沉降速度作为整体评价因子,评价污水的情况,另一方面利用图像处理方式对污水进行分区,根据各个区的特点分区评价各区的性状,整体特征与区域特征相结合,提高了污水污染等级识别的准确度和全面性。同时在污水分区评价时,根据各个区的特点,从性状、颜色、清晰度等多个角度进行评价,评价角度全面,在评价过程中以简单的几何计算、物体识别替代传统的微生物识别方式,减少了识别过程对人为标注的依赖,同时降低了识别算法的复杂度和计算量。
17.图像预处理和区域分割直接决定了分区识别的准确度和污水等级识别的计算量,本发明根据污水图像在不同状态下的图像特点,选择恰当的预处理方式,一方面对于浑浊状态下的污水图像,无需过度预处理,节约了计算量;另一方面对于分层状态下的污水图像,能够针对在后步骤计算的需求针对性优化特定区域的特定图像属性,利用直方图均衡化增强上清液和污泥的对比度,使其区分度更加明显,从而提高污水等级识别的准确度。在对污水区域进行分割时,本发明充分利用污水自身特性,结合边缘检测方法和纹理分割方法,先利用矩形纹理分割单元进行粗定位,然后利用边缘检测算子进行精定位,保证了边界线检测的准确度,同时减少了逐像素遍历的计算量和计算时间。在纹理分割时,由于只需要检测水平方向上的分界线,因此纹理分割单元宽度直接与容器宽度保持一致,减少了图像像素区域纹理计算量;此外,在遍历周期中,由于污泥区域高度一般较高,本发明利用指数衰减函数控制各周期纹理分割单元的高度,在底部区域纹理分割单元面积较大,在靠近分界线的位置,纹理分割单元高度较小,实现变分割单元的纹理计算,兼顾了分界线定位效果和图像纹理计算量。
18.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
19.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
20.图1为本发明实施例提供的基于图像的污水等级识别方法流程图;图2为本发明实施例提供的泥水混合层与污泥层的泥水分界线示意图;图3为本发明实施例包含絮体特征的污泥图像。
具体实施方式
21.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。以下各个实施例的划分是为了描述方便,不应对本发明的具体实现方式构成任何限定,各个实施例在不矛盾的前提下可以相互结合相互引用。
22.本发明的第一实施方式涉及一种基于图像的污水等级识别方法,用于判断排放的污水是否符合排放标准。如图1所示,基于图像的污水等级识别方法包括:步骤s1:获取污水图像并定位污水区域,根据污水区域的图像属性对污水图像进行预处理,获得预处理后的污水图像。
23.获取污水图像,污水图像中包括盛有污水的容器和环境,从污水图像中定位容器区域,并进一步从容器区域中定位污水区域。作为一种可选的实施例,盛有污水的容器可以为量筒,污水图像包括沉降过程中的多张图像,多张图像中至少两张图像中污水区域污水状态不同,多张图像中包括浑浊状态下的污水图像和分层后的污水图像。
24.为了从污水图像中定位区域以便识别污水等级,利用目标检测模型定位容器区域,并进一步根据容器区域定位污水区域。因污水图像包括沉降过程中的多张图像,因此,定位每张污水图像中的污水图像。作为一种可选的实施例,定位污水区域之前,还包括筛选出亮度和清晰度符合预设条件的污水图像。目标检测模型包括mobilenet v3,利用mobilenet v3定位容器区域,在容器区域中定位污水区域。定位污水区域后,进一步的,还包括以容器区域边界为参考,裁剪污水图像,容器区域边界距离裁剪后污水图像对应边界的距离为第一距离。由于拍摄的角度、距离各不相同,污水图像可能包括各种复杂的背景图片,而污水主要是水、污泥,其颜色、色调极容易与环境背景相重合,此时直接对图像进行预处理针对性不足,不能准确调整污水区域的图像效果,进而导致无法准确识别污水等级,为了在图像预处理阶段排除环境干扰因素对等级识别结果的影响,本发明在预处理之前直接对污水图像进行裁剪,以便后期预处理无需考虑环境的图像属性,简化了图像处理的计算量同时提高了污水等级识别的准确度。
25.根据污水区域的图像属性对污水图像进行预处理,具体包括:污水图像包括浑浊状态下的污水图像和分层后的污水图像,选择分层后的污水图像,对分层后的污水图像的污水区域进行直方图均衡化处理;选择浑浊状态下的污水图像,调整浑浊状态下污水图像中污水区域的亮度至污水最优亮度阈值;对所有污水图像进行仿射变换和透视变换。本发明根据污水的不同状态对污水图像进行预处理,浑浊状态下,污水为水泥混合物,为了便于在后步骤计算,调整图像亮度,使污水区域更为清晰,便于观察污水区域细节;对于分层后的污水图像,各层细节和各层的分界情况是污水等级识别的基础,为了提高污水等级识别的准确度,调整该区域内各个分层的亮度对比度,使污水区域整体清晰可见外,同时各层之间能够明显区分。相对于现有技术中对图像整体进行预处理的方式,本发明根据污水图像在不同状态下的图像特点,选择恰当的预处理方式,一方面对于浑浊状态下的污水图像,无需过度预处理,节约了计算量;另一方面对于分层状态下的污水图像,能够针对在后步骤计算的需求针对性优化特定区域的特定图像属性,利用直方图均衡化增强上清液和污泥的对
比度,使其区分度更加明显,从而提高污水等级识别的准确度。
26.作为一种可选的实施例,获取多张污水图像的拍摄时间,对于第一时间周期内的多张污水图像,计算污水区域浑浊状态下污水图像中污水区域清晰度,选择清晰度最高的图像第一时间周期的代表污水图像,并对各个时间周期的代表污水图像进行预处理。
27.步骤s2:从预处理后的分层状态的污水图像中检测分界线,获取上清液区域、泥水混合区域和污泥区域。
28.从预处理后的分层状态的污水图像中检测分界线,具体来说,根据污水区域高度计算纹理分割单元尺寸,利用纹理分割定位泥水分界线区域和上清液与泥水混合层分界线区域,在泥水分界线区域和上清液与泥水混合层分界线区域中利用边缘检测算子计算泥水分界线和上清液与泥水混合层分界线。由于污水放置在容器内,各层的宽度应该直接与容器的宽度一致,纹理分割单元区域的宽度即为容器的宽度,在污泥区域内,各分割周期的纹理分割的高度为,其中h为容器内污水区域高度,a为与污水类型对应的污泥厚度预设系数,b为指数底,0《b《1,i表示第i个纹理计算周期,m表示平移系数,利用确定后的纹理分割单元,在污水区域中从容器底部起容器顶部进行纹理分割,检测泥水分界线区域;在泥水分界线区域内,计算各像素点的边缘检测算子,根据边缘检测算子获取泥水分界线。在泥水混合区域中,纹理分割的高度为容器内污水区域高度与污水类型对应的混合区域厚度预设系数的乘积,在污水区域中从泥水分界线起至顶部进行纹理分割,检测上清液与泥水混合层分界线区域,在上清液与泥水混合层分界线区域中,根据边缘检测算子定位上清液与泥水混合层分界线。定位泥水分界线和上清液与泥水混合层分界线后,污水区域被分割为上清液区域、泥水混合区域和污泥区域。
29.本发明在对污水区域进行分割时,需要定位各层边界线,现有技术中图像边缘检测方法需要逐个像素点计算边缘检测算子,计算时间较长、计算量大,而基于纹理的分割方法同样需要以一固定分割单元对图像进行遍历,计算时间较长,计算量大。本发明充分利用污水自身特性,结合边缘检测方法和纹理分割方法,先利用矩形纹理分割单元进行粗定位,然后利用边缘检测算子进行精定位,保证了边界线检测的准确度,同时减少了逐像素遍历的计算量和计算时间。在纹理分割时,由于只需要检测水平方向上的分界线,因此纹理分割单元宽度直接与容器宽度保持一致,减少了图像像素区域纹理计算量;此外,在遍历周期中,由于污泥区域高度一般较高,本发明利用指数衰减函数控制各周期纹理分割单元的高度,在底部区域纹理分割单元面积较大,在靠近分界线的位置,纹理分割单元高度较小,实现变分割单元的纹理计算,兼顾了分界线定位效果和图像纹理计算量。
30.步骤s3:根据预处理后的污水图像计算沉降速度,根据步骤s2获得的分界线,识别上清液区域模糊度、泥水混合区域清晰度和污泥区域颜色以及絮体状态。
31.计算沉降速度具体包括:选择浑浊状态下和分层状态下的预处理后的污水图像,获得第一图像和第二图像,获取第一、第二图像的采集时间,计算采集时间差,根据第二图像计算污泥高度,根据分层状态下污泥高度和混沌状态下污水高度比、以及第一、第二图像采集时间差计算沉降比,根据沉降比计算污泥指数,以识别沉降速度。
32.步骤s2获得了泥水分界线和上清液与泥水混合层分界线,整个污水区域划分为上清液区域、泥水混合区域和污泥区域,区域分割完成后分区域评价各个区域的特点,从而全
面评价污水等级。通常来说,符合排放标准的工业污水上清液通常为清澈状态,泥水混合层通常分界线清晰且厚度一定,污泥层的颜色、絮体状态根据污水的类型具有特定的性状,因此根据上述各个区域的特点对污水进行识别,上清液区域模糊度由上清液中杂点数量和上清液模糊度确定,根据马氏距离计算上清液中杂点数量,根据上清液像素点灰度变化量确定上清液模糊度。
33.识别上清液区域模糊度具体包括:根据上清液类型设置上清液阈值,计算上清液中的杂点数量和模糊度,根据上清液阈值、杂点数量和模糊度识别上清液等级。其中,上清液阈值包括:清澈状态下杂点数量阈值k1和模糊度阈值k2。计算上清液中杂点数量具体为:获取上清液特征图,计算特征点的马氏距离,若马氏具体大于距离阈值,则特征点为杂点,统计上清液特征图中的杂点数量。计算上清液模糊度具体为:计算上清液区域像素点的灰度变化量,以灰度变化量的倒数作为上清液模糊度。作为一种可选的实施例,可根据brenner梯度函数或灰度方差函数计算像素点的灰度变化量。
34.具体来说,根据brenner梯度函数计算灰度变化量包括:根据上清液高度划分第一区域和第二区域,计算第一区域中水平方向和竖直方向像素点灰度差,以获得第一区域灰度变化量;计算第二区域中水平方向像素点灰度差以获得第二区域的灰度变化量;以两个区域的灰度变化量之和作为上清液灰度变化量。第一区域自上清液顶面开始,高度为k3*h
上
,k3为清澈高度占比,h
上
为上清液高度,上清液中除第一区域外的其他区域为第二区域,上清液灰度变化量为:,其中,d(f)为上清液灰度变化量,、分别为第一区域和第二区域,(x,y)表示像素点坐标位置,f(x,y)、f(x+2,y)、f(x,y+2)、f(x+1,y)分别表示对应像素点的灰度值。
35.具体来说,根据灰度方差函数计算灰度变化量包括:计算上清液中心区域垂直方向各像素点灰度值,根据各像素点灰度变化梯度划分灰度区域,分别计算各灰度区域的灰度均值,计算各个灰度区域内像素点灰度值与区域的灰度均值之间的灰度差,以计算整个上清液的灰度变化量。在垂直上清液平面方向上选择上清液中心的各个像素点,计算各个像素点灰度值,计算相邻像素点灰度值变化率,若变化率大于灰度变化阈值,则划分灰度区域,遍历垂直方向上中心的各个像素点灰度值,获得多个灰度区域,上清液灰度变化量为:其中:其中,d(f)为上清液灰度变化量,j表示划分后的灰度区域数量,表示第j个灰度区域,(x,y)表示像素点坐标位置,f(x,y)表示像素点的灰度值,表示第j个灰度区域的灰度均值。
36.计算杂点数量和模糊度后,根据上清液阈值、杂点数量和模糊度计算上清液等级系数,根据上清液等级系数获得上清液污染等级。上清液等级系数具体为:
,其中,k
上
、m
上
分别为上清液杂点数量和模糊度,k1、k2分别为杂点数量阈值和模糊度阈值。若p》p1,则上清液严重污染,若p1≤p≤p2,则上清液存在少量污染物,为中度污染;若p《p2,则上清液清澈,p1、p2为上清液污染等级阈值。
37.进一步的,为了根据人眼观察效果校正污染等级,步骤s3还包括在污水容器外表面粘贴标志物,标志物可以为竖向色卡,获取污水在前、标注物在后的上清液图像,计算上清液图像中标注物清晰度,若标志物清晰度低于预设阈值,向上调整上清液污染等级。
38.本发明在上清液污染等级识别时,从灰度变化、杂质含量各个角度对其进行评价,同时还能够从视觉效果角度对评价结果进行修正,评价角度全面、准确性高;且由于物质的扩散,靠近泥水混合区的上清液可能存在一定程度的浑浊现象,在灰度变化判断时,本发明根据污水沉淀后的特点,对上清液进行分区域灰度变化判断,能够从灰度变化的角度准确反应上清液的清澈程度。
39.识别泥水混合区域清晰度,具体包括:获取泥水混合区域厚度信息和泥水分界线,根据厚度信息与混合物厚度阈值的关系以及泥水分界线的偏离情况确定泥水混合区清晰度。
40.选择分层状态下预处理后的污水图像,计算泥水分界线和上清液与泥水混合层分界线之间的液体高度,作为泥水混合区域厚度。进一步的,若上清液与泥水混合层分界线模糊,此时,在污水容器外表面粘贴标志物,标志物跨越上清液、泥水混合层和污泥层,标志物可以为竖向色卡,获取污水在前、标注物在后的污水图像,计算图像中标注物各像素点的清晰度,若标志物像素点清晰度低于预设阈值,以该像素点作为上清液与泥水混合层的分界点,计算泥水混合区域厚度。
41.泥水分界线为泥水混合层与污泥层的分界线,如图2所示,根据泥水混合层预设状态计算分界线偏离阈值,计算当前泥水分界线上各点偏离分界直线的偏离值,根据当前泥水分界线的偏离值与分界线偏离阈值的关系确定分界线的偏离情况。泥水混合层预设状态包括:泥水界面成一条线、泥水界面污泥有一定的起伏、泥水界面起伏很大、泥水无界面,分别统计各个预设状态下,泥水界面直线上的像素点数量,作为分界线偏离阈值。
42.比较泥水混合区域厚度与混合物厚度阈值,混合物厚度阈值与污水类型相关,若泥水混合区域厚度小于混合物厚度阈值,且分界线的偏离情况属于预设污水类型对应的状态,则泥水混合区域清晰度正常。
43.识别污泥区域颜色,具体为:根据不同等级的污泥状态设置污泥标准颜色,计算污泥区域像素点的核心颜色值,对比污泥标准颜色和污泥区域像素点核心颜色值,识别污泥区域颜色。不同等级的污泥状态包括健康标准状态、低负荷标准状态和高负荷标准状态,不同状态下污泥颜色不同,健康标准状态下污泥呈棕黄色,污泥状态正常,低负荷标准状态下污泥呈苍白色,污泥过度曝气,需要减少供氧或排放污泥,高负荷标准状态下污泥呈黑灰色,属于厌氧态,此时需要增加供氧。根据污泥区域图像划分核心区和干扰区,计算核心区像素点颜色,统计各个状态下污泥颜色值的像素点个数,获取像素点最多的颜色值,若不同污泥颜色值的像素点数量差大于第一阈值,则以像素点最多的颜色值作为污泥区域像素点
核心颜色值;否则以像素点颜色均值作为核心颜色值。作为一种可选的实施例,若棕黄色的像素点数量最多,则核心颜色值为棕黄色,根据污泥区域颜色——棕黄色可知,污泥属于健康标准状态。
44.污水中常见的絮体状态分三大类,第一类絮体胶羽丰满,有蚯蚓纹;第二类有絮体,胶羽封堵不够或者有卷毡;第三类:无絮体或者絮体细碎或者蓬松。本发明利用卷积网络分类识别网络组合识别污水中所有絮体,如图3所示,即图中的黑色小孔洞,以根据黑色小孔洞的数量和尺寸来识别絮体状态。如果某张图片黑色孔洞数量超过一定的比例则判定为第一类;若孔洞数量不多或黑色孔洞太小则判定为第二类,污泥可能有点老化,需要进行更新;第三类则是未检测到黑色孔洞,这一类可能是污泥老化严重,污泥解絮,膨胀,营养不良,污泥中毒等原因导致污泥健康状态严重不符。
45.识别絮体状态,具体为:获取包含絮体特征的污泥图像,构建絮体识别模型,利用絮体识别模型识别污泥图像的絮体状态。絮体识别模型包括多个串行连接的第一卷积层,卷积层获得的特征输入至cbam层,cbam连接和多个第二卷积层,多个第二卷积层以上一层的输出特征为输入,多个第二卷积层将特征同时输出至下一层和分类识别层,多个第二卷积层输出连接至直方图层,直方图层输出连接至分类识别层。絮体识别模型首先利用第一卷积层提取图像特征,然后为了提取污泥区域图像的高层语义信息,利用多感受野模块提取多个尺度的特征,提高识别的精确度;在多尺度特征提取之前,借助cbam注意力聚合特征,融合了浅层和高层的特征,提高了微小目标的检测效果。
46.直方图层利用rbfs对直方图进行建模,以高斯函数作为核函数,为rbfs的平均值,,,作为在c通道上的第b个bin的中心;为rbfs的带宽,作为在通道上的第个bin的宽度,使用s
×
t的滑动窗口计算归一化频率计数:其中,表示特征图中对应位置的特征值,s、t为滑动窗口尺寸信息,表示c通道上第b个bin的宽度,表示c通道上第b个bin的中心。
47.通过反向传播来更新bin的中心和宽度,中心梯度和宽度梯度分别为:通过反向传播来更新bin的中心和宽度,中心梯度和宽度梯度分别为:直方图层使用梯度下降法不断更新和的值,即不断更新bin的中心和宽度。
48.本发明中,bin中心和宽度的更新梯度值是关于特征图值和bin中心距离的函数,如果特征图值离bin中心较远,对应梯度值也会较小,反之如果特征图值离bin中心越近,对
应梯度值也会较大,使得rbfs对于bin的中心和宽度的微小变化比标准直方图操作更具有鲁棒性。本发明利用多尺度信息进行絮体状态分类识别,综合利用了浅层信息和高层语义信息,提高了絮体状态分类识别准确度,同时直方图曾利用变梯度方式更新bin中心和宽度,提高了分类识别系统的鲁棒性进而提高了分类识别的准确度。
49.步骤s4:根据沉降速度和步骤s3获得的识别结果确定污水等级。
50.以污水的沉降速度和上清液区域模糊度、泥水混合区域清晰度和污泥区域颜色以及絮体状态构成污水属性数组,将污水属性数组输入至污水等级分类模型,根据污水等级分类模型的输出确定污水污染等级和被污染区域。作为一种可选的实施例,污水等级分类模型为神经网络模型,输入为当前污水的属性数组,输出为污水的污染等级和被污染的区域。
51.本发明提供的基于图像的污水等级识别方法,一方面以沉降速度作为整体评价因子,评价污水的情况,另一方面利用图像处理方式对污水进行分区,根据各个区的特点分区评价各区的性状,整体特征与区域特征相结合,提高了污水污染等级识别的准确度和全面性。同时在污水分区评价时,根据各个区的特点,从性状、颜色、清晰度等多个角度进行评价,评价角度全面,在评价过程中以简单的几何计算、物体识别替代传统的微生物识别方式,减少了识别过程对人为标注的依赖,同时降低了识别算法的复杂度和计算量。
52.本发明实施例二提供一种基于图像的污水等级识别装置,污水等级识别装置包括:图像获取和预处理模块,用于获取污水图像并定位污水区域,根据污水区域的图像属性对污水图像进行预处理,获得预处理后的污水图像。
53.分层检测模块,用于从预处理后的分层状态的污水图像中检测分界线,获取上清液区域、泥水混合区域和污泥区域。
54.污水评价模块,用于根据预处理后的污水图像计算沉降速度,根据分层检测模块获得的分界线,识别上清液区域模糊度、泥水混合区域清晰度和污泥区域颜色以及絮体状态。
55.污水等级确定模块,用于根据沉降速度和污水评价模块获得的识别结果确定污水等级。
56.不难发现,本实施方式为与第一实施方式相对应的装置实施例,本实施方式可与第一实施方式互相配合实施。第一实施方式中提到的相关技术细节在本实施方式中依然有效,为了减少重复,这里不再赘述。相应地,本实施方式中提到的相关技术细节也可应用在第一实施方式中。
57.值得一提的是,本实施方式中所涉及到的各模块均为逻辑模块,在实际应用中,一个逻辑单元可以是一个物理单元,也可以是一个物理单元的一部分,还可以以多个物理单元的组合实现。此外,为了突出本发明的创新部分,本实施方式中并没有将与解决本发明所提出的技术问题关系不太密切的单元引入,但这并不表明本实施方式中不存在其它的单元。
58.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1