一种结合LIDAR水深数据的高光谱海底反射率反演方法
一种结合lidar水深数据的高光谱海底反射率反演方法
技术领域
1.本发明涉及遥感技术应用和海底探测技术领域,尤其涉及一种结合lidar水深数据的高光谱海底反射率反演方法。
背景技术:
2.随着机载激光雷达测深技术的进展,主动和被动传感器的融合现在是一个有吸引力的选择,将对广大地区的海洋环境和生态研究做出巨大贡献。无源光学传感器可以收集多个波长甚至高光谱波长的离开水辐射,而激光雷达可以提供来进行近岸水深估计和海洋后向散射测量。而目前在利用高光谱遥感反演浅海水下地形和底质反射率方面面临一系列的难点与挑战,例如如何充分利用已获得的机载激光雷达测深数据,通过已知水深信息消除因水深变化引起的反射率变化和水柱衰减效应。
技术实现要素:
3.本发明的目的在于提供一种结合lidar水深数据的高光谱海底反射率反演方法,以解决上述背景技术中提出的问题。
4.本发明是通过以下技术方案实现的:一种结合lidar水深数据的高光谱海底反射率反演方法,包括下列步骤:
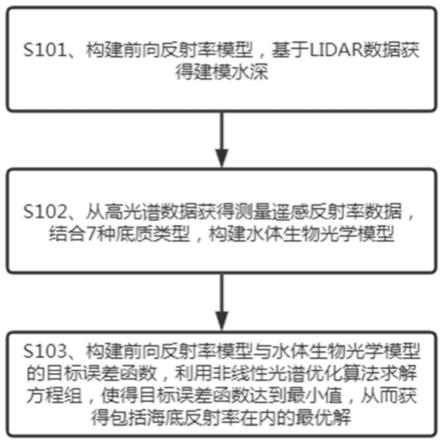
5.s101、构建前向反射率模型,基于lidar数据获得建模水深;
6.s102、从高光谱数据获得测量遥感反射率数据,结合7种底质类型,构建水体生物光学模型;
7.s103、构建前向反射率模型与水体生物光学模型的目标误差函数,利用非线性光谱优化算法求解方程组,使得目标误差函数达到最小值,从而获得包括海底反射率在内的最优解。
8.可选的,构建前向反射率模型,所述前向反射率模型包括:
[0009][0010]rrs
(λ;a,bb,h,ρ)≈(0.084+0.170u(λ))u(λ)
[0011][0012][0013]
式中,λ为波长,u(λ)为后向散射系数与漫衰减系数的比值,a(λ)为水体总吸收系
数,bb(λ)为海水后向散射系数,h为水深数据,θw为水面以下太阳天顶角,θv为水面以下观测天顶角,ρ(λ)为底质反照率,γ为水汽分离因子,1-ζr
rs
为水汽界面内部反射因子,r
rs
为次表层遥感反射率。
[0014]
可选的,所述水体生物光学模型为:
[0015][0016][0017]
式中,为水体生物光学模型中的水汽界面内部反射因子,τ为水体生物光学模型中的水汽分离因子,表示水体的光学路径散射因子,表示水底的光学路径散射因子,为光学深水区的次表层遥感反射率,θ
ω
为水体生物光学模型中的水面以下太阳天顶角,θv为水体生物光学模型中的水面以下观测天顶角,k为水体的辐射漫衰减系数。
[0018]
可选的,在所述前向反射率模型中,从7种底质中随机选择三种底质进行组合,生成关于35种情况的建模遥感反射率方程。
[0019]
可选的,所构建的目标误差函数为:
[0020][0021]
式中,r
rs
为测量遥感反射率,为建模遥感反射率。
[0022]
可选的,当目标误差函数达到最小值时,可以获得多个最优解,所述最优解对应浅海水的深度、海底反射率和固有光学特性。
[0023]
与现有技术相比,本发明达到的有益效果如下:
[0024]
本发明提供的一种结合lidar水深数据的高光谱海底反射率反演方法,基于所构建的前向反射率模型以及基于lidar数据,获得所述前向反射率模型的建模遥感反射率,通过所构建的水体生物光学模型,获得测量遥感反射率,通过构建基于建模遥感反射率与测量遥感反射率的目标误差函数,并利用非线性光谱优化算法求解方程组,使得目标误差函数达到最小值,可以最大限度地减少水深信息消除因水深变化引起的反射率变化和水柱衰减效应引起的光谱曲线变化,最后依据简化后的水体辐射传输方程获得底质反射率信息,从而获得包括海底反射率在内的最优解,本技术可以实现岛礁浅海底质反射率的大面积测量,为水下底质分类和珊瑚礁健康状况监测评估提供新的手段,具有极大的实用价值。
附图说明
[0025]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0026]
图1为本发明提供的一种结合lidar水深数据的高光谱海底反射率反演方法的流
程图;
[0027]
图2为本发明提供的七种底质及反射率曲线示意图。
具体实施方式
[0028]
为了使得本发明的目的、技术方案和优点更为明显,下面将参照附图详细描述根据本发明的示例实施例。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是本发明的全部实施例,应理解,本发明不受这里描述的示例实施例的限制。基于本发明中描述的本发明实施例,本领域技术人员在没有付出创造性劳动的情况下所得到的所有其它实施例都应落入本发明的保护范围之内。
[0029]
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
[0030]
应当理解的是,本发明能够以不同形式实施,而不应当解释为局限于这里提出的实施例。相反地,提供这些实施例将使公开彻底和完全,并且将本发明的范围完全地传递给本领域技术人员。
[0031]
在此使用的术语的目的仅在于描述具体实施例并且不作为本发明的限制。在此使用时,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、元件、部件和/或组的存在或添加。在此使用时,术语“和/或”包括相关所列项目的任何及所有组合。
[0032]
为了彻底理解本发明,将在下列的描述中提出详细的结构,以便阐释本发明提出的技术方案。本发明的可选实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
[0033]
参见图1,一种结合lidar水深数据的高光谱海底反射率反演方法,包括下列步骤:
[0034]
s101、构建前向反射率模型,基于lidar数据获得建模水深;
[0035]
s102、从高光谱数据获得测量遥感反射率数据,结合7种底质类型,构建水体生物光学模型;
[0036]
s103、构建前向反射率模型与水体生物光学模型的目标误差函数,利用非线性光谱优化算法求解方程组,使得目标误差函数达到最小值,从而获得包括海底反射率在内的最优解。
[0037]
具体的,在步骤s101中,构建前向反射率模型,所述前向反射率模型包括:
[0038][0039]rrs
(λ;a,bb,h,ρ)≈(0.084+0.170u(λ))u(λ)
[0040][0041][0042]
式中,λ为波长,u(λ)为后向散射系数与漫衰减系数的比值,a(λ)为水体总吸收系数,bb(λ)为海水后向散射系数,h为水深数据,θw为水面以下太阳天顶角,θv为水面以下观测天顶角,ρ(λ)为底质反照率,γ为水汽分离因子,1-ζr
rs
为水汽界面内部反射因子,r
rs
为次表层遥感反射率。
[0043]
对于前向反射率模型中的其他参数,其a(λ)=aw(λ)+a
phy
(λ)+ag(λ),其中aw为经验系数,而a
phy
,ag参数化为:
[0044]aphy
(λ)=[a0(λ)+a1(λ)ln(p)]p
[0045]ag
(λ)=ge-s(λ-440)
[0046]
对于海水后向散射系数,其通过下式获得:
[0047]bb
(λ)=bw(λ)+b
bp
(λ)
[0048]
其中bw为经验系数,b
bp
为悬浮颗粒物后向散射系数,其参数化为:
[0049]bbp
(λ)=x(400/λ)y[0050]
引入参数化模型后,水体生物光学模型遥感反射比方程组可改写为仅有7个未知量的方程组,利用非线性光谱优化算法求解方程组,使目标误差函数达最小值,进而获取包括海底反射率在内的最优解。
[0051]
具体的,在步骤s102中,所述水体生物光学模型为:
[0052][0053][0054]
式中,为水体生物光学模型中的水汽界面内部反射因子,τ为水体生物光学模型中的水汽分离因子,表示水体的光学路径散射因子,表示水底的光学路径散射因子,为光学深水区的次表层遥感反射率,θ
ω
为水体生物光学模型中的水面以下太阳天顶角,θv为水体生物光学模型中的水面以下观测天顶角,k为水体的辐射漫衰减系数。
[0055]
其中,
[0056]
k=a+bb[0057][0058]
[0059]
μ=bb/(a+bb)
[0060]bb
=bw+b
bp
[0061]
a=aw+a
phy
+ag[0062]
光学深水遥感反射比可表示为
[0063][0064][0065]
其中,g0=0.084;g1=0.170;gz=1。
[0066]
如果有n个相互独立的光谱通道,表达式
[0067][0068]
可以表示为以下方程组,
[0069]rrs
(λ1)=f[a
ω
(λ1),b
bω
(λ1),a
phy
(λ1),ag(λ1),b
bp
(λ1),ρ(λ1),h]
[0070]rrs
(λ2)=f[a
ω
(λ2),b
bω
(λ2),a
phy
(λ2),ag(λ2),b
bp
(λ2),ρ(λ2),h]
…
[0071]rrs
(λn)=f[a
ω
(λn),b
bω
(λn),a
phy
(λn),ag(λn),b
bp
(λn),ρ(λn),h]
[0072]
其中:a
ω
(λ),b
bω
(λ)为已知量,因此,对于每一个r
rs
(λn)光谱,有4个与光谱有关的未知量(a
phy
(λ),ag(λ),b
bp
(λ),ρ(λ)和1个与光谱无关的未知量h,对于n个方程,则有4n+1个未知量需要被求解。为从数学上解决这个问题,需要引入一些经验的参数化模型以减少未知量。
[0073]aphy
(λ)=[a0(λ)+a1(λ)ln(p)]p
[0074]
其中:p=a
phy
(440),为波长440nm处的浮游植物色素吸收系数。a0(λ)和a1(λ)为经验系数
[0075]ag
(λ)=ge-s(λ-440)
[0076]
其中:g=ag(440),为波长440nm处的有色可溶有机物和碎屑的吸收系数,光谱斜率s=0.015nm-1
为经验系数。
[0077]bbp
(λ)=x(400/λ)yꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2-18)
[0078]
其中:x=b
bp
(400),为波长400nm处的颗粒物后向散射系数,光谱斜率y,为经验系数,ρ(λ)=bρ
+
,其中:n为550nm处的海底反射率;ρ
+
为归一化海底反射率光谱。
[0079]
具体的,在所述前向反射率模型中,从7种底质中随机选择三种底质进行组合,生成关于35种情况的建模遥感反射率方程。
[0080]
参见图2,对于前向反射率模型,从7种底质中随机选择三种底质进行组合,生成35种情况的底部反射率ρ(λ),从而进一步生成关于35种情况的建模遥感反射率方程。
[0081]
其底部反射率ρ(λ)可以表示为
[0082]
ρ(λ)=b1ρ1(λ)+b2ρ2(λ)+b3ρ3(λ)
[0083]
b1+b2+b3=1.0
[0084]
ρ1、ρ2和ρ3分别指第一、第二、第三种底质在550nm处归一化的反射率光谱,b1、b2和b3,分别指第一、第二、第三种底质在550nm处的底部反射率值。
[0085]
具体的,在步骤s103中,所构建的目标误差函数为:
[0086][0087]
式中,r
rs
为测量遥感反射率,为建模遥感反射率。
[0088]
遍历35种情况求解,使目标误差函数达到最小值,并求出35组数据中残差最小的底质反射率组合,当目标误差函数达到最小值时,当目标误差函数达到最小值时,可以获得多个最优解,所述最优解对应浅海水的深度、海底反射率和固有光学特性。
[0089]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1