航天器AIT过程复杂场景产品识别与定位方法、系统及介质与流程
本发明涉及机器视觉技术以及工业数据管理,具体地,涉及一种航天器ait过程复杂场景产品识别与定位方法、系统及介质。
背景技术:
1、航天器ait(装配、集成测试与试验)过程中,图像是记录产品质量、技术状态及生产进度的重要媒介。图像数据的分析与应用贯穿卫星型号研制初样、正样阶段中总装、测试和试验等全过程,在整星总装、整星测试,电磁兼容性试验、力学振动试验(包括振动试验、噪声试验)等专项试验,以及大系统间对接试验等过程中会产生大量的图像数据,作为考核航天器功能性能指标,评价其是否满足系统设计要求,是否满足可靠性设计、标准化等要求的重要数据材料。
2、航天器是一种复杂的工程系统,涉及的系统构成、环境因素、过程环节非常多,采集的图像往往包含多类产品及其他干扰对象,图像数据缺乏有效关联、质量难以管控,“找不到、对不上、用不了”问题突出,难以实现目标产品的全面精准定位,产品状态确认困难,形成海量的图像数据平时“无人问津”,事后查找追溯“海底捞针”的局面。因此,打通“现场拍照-图像存储-产品快速识别与定位-集成与应用”的图像数据传递链路,实现图像的高效完整采集、有效管理和分析利用是型号研制的迫切需求。
3、针对航天器ait过程复杂场景产品快速识别与定位,现有的复杂场景产品快速识别与定位装置与方法,如公开号为cn105787450a的发明专利,公开的一种基于高分辨率sar图像的城市地区建筑物检测方法,首先通过阈值分割提取sar图像高亮区域进行角线检测;其次通过连接角线的末端实现二次散射线检测;接着通过角线和二次散射线确定墙面叠掩区域并分离;然后对分离出的叠掩区域的纹理特性进行分析,转化成以角度为变量的一维能量谱,并找出能量谱最大值对应的角度;最后,以该角度为90°±3°作为建筑物判定为真的原则进行判定。往往存在以下不足:
4、(1)由于卫星场景复杂,涉及的产品领域较广,现有方法对复杂场景中多类物体检测装置速度较慢、准确性低,目前的方法不适用于航天器复杂场景中多类产品的快速识别与定位;
5、(2)目前主流的复杂场景目标快速识别与定位方法均是以图像处理为基础的机器视觉技术,通过特征点匹配、训练分类器等方法实现目标的检测与定位,如随机森林、bp(back propagat ion)神经网络以及svm(support vector machine)分类器等,但是上述方法检测速度慢、且精度低,无法满足航天器复杂场景中多类产品的快速、准确识别与定位的要求。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种航天器ait过程复杂场景产品识别与定位方法、系统及介质。
2、根据本发明提供的一种航天器ait过程复杂场景产品识别与定位方法、系统及介质,所述方案如下:
3、第一方面,提供了一种航天器ait过程复杂场景产品识别与定位方法,所述方法包括:
4、步骤s1:选取航天器ait过程中的样本采集目标,利用图像采集设备获取样本图像;
5、步骤s2:采用高斯图像金字塔方法将所述样本图像尺寸进行处理,降低样本图像的分辨率;
6、步骤s3:提取所述样本图像中产品图像的边缘梯度方向特征,定义产品图像边缘梯度方向对应的二进制编码表,根据所述二进制编码表计算样本图像中每个产品边缘像素点处梯度方向的相似度测量值,为每类产品构建用于表述产品特征的边缘梯度方向特征查找表;
7、步骤s4:获取实测图像,提取实测图像中各类产品的边缘梯度方向特征,利用所述二进制编码表,计算实测图像中各类产品的相似度测量值,并与样本图像中各类产品的相似度测量值进行比较,识别具体目标,对产品进行定位;
8、步骤s5:利用nms算法对定位的产品进行筛选,去除冗余产品图像,获得最终检测目标,实现对实测图像中各类产品的精确定位。
9、优选地,所述步骤s2采用4层高斯图像金字塔方法对样本图像尺寸进行处理,高斯图像金字塔底层为原始图像,利用高斯核对其进行卷积,对卷积之后的图像进行下采样,获得上一层图像;
10、所述步骤s3中提取样本图像中产品图像的边缘梯度方向特征,梯度的方向角位于0~π之间,将0~π划分为n=8个区间,定义每个区间对应的8位二进制编码表。
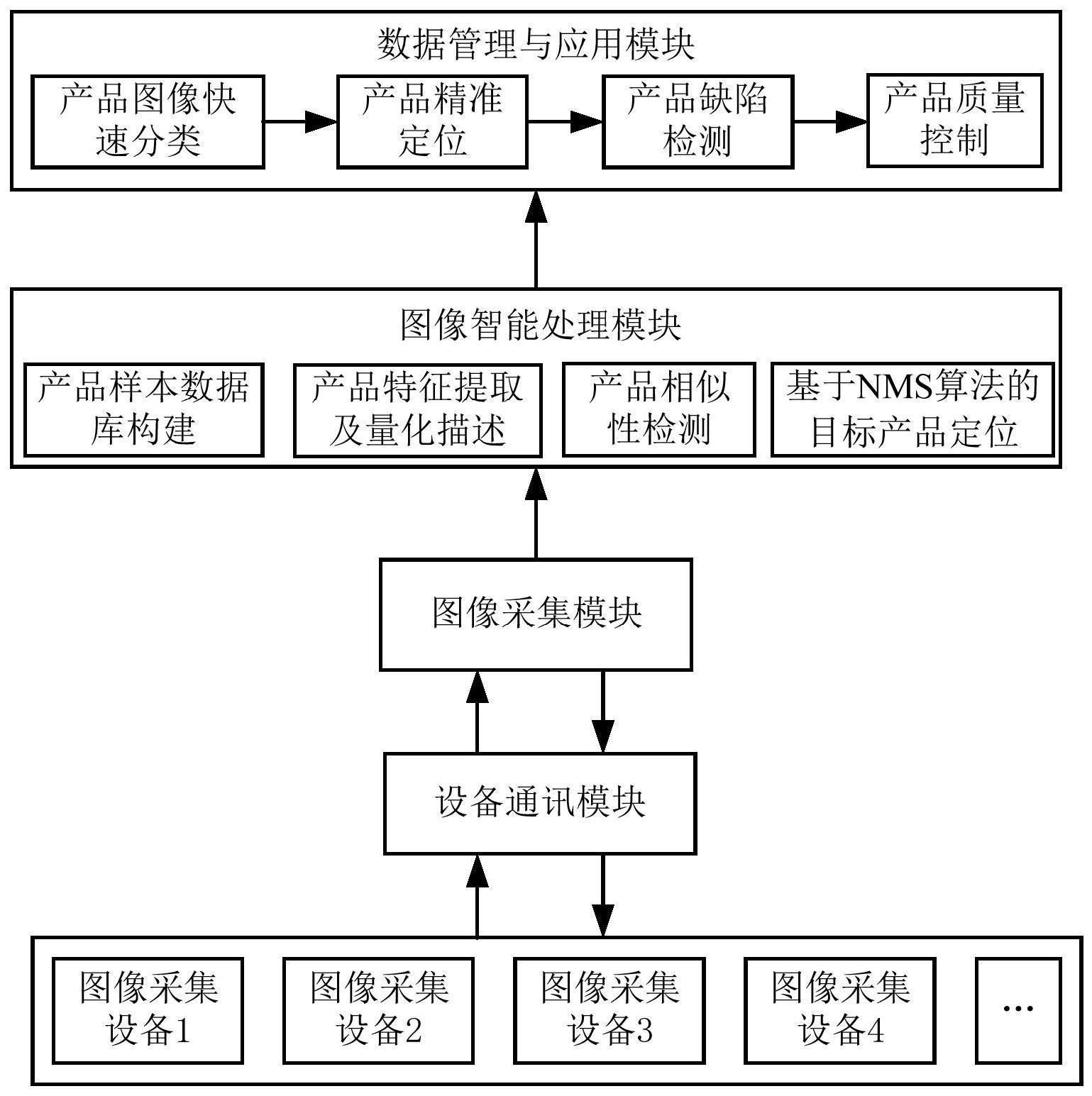
11、第二方面,提供了一种航天器ait过程复杂场景产品识别与定位系统,所述系统包括:设备通讯模块、图像采集模块、图像智能处理模块以及数据管理与应用模块;
12、所述设备通讯模块与图像采集设备连接,并与图像采集模块实时通信;
13、所述图像采集模块采集得到的图像数据依次经图像智能处理模块、数据管理与应用模块输出,得到产品识别与分别结果。
14、优选地,所述图像智能处理模块用于产品样本数据库构建、产品特征提取及量化描述、产品相似性检测以及基于nms算法的目标产品定位;具体包括:产品样本数据库构建子模块、产品特征提取及量化描述子模块、产品相似性检测子模块以及基于nms算法的目标产品定位子模块;
15、所述图像采集模块采集得到的图像数据在图像智能处理模块中,依次经产品样本数据库构建子模块、产品特征提取及量化描述子模块、产品相似性检测子模块以及基于nms算法的目标产品定位子模块得到设定的结果。
16、优选地,所述产品样本数据库构建子模块包含:整星、单机、电缆、多层、热管以及机械臂设备在内的相关多类产品样本图像,并利用高斯图像金字塔方法,对原始图像进行预处理,降低模板图像的分辨率;所述产品样本数据库构建子模块用于与现场实际采集图像进行配准;
17、所述产品特征提取及量化描述子模块用于构建产品图像边缘梯度方向特征描述;通过提取产品边缘梯度方向特征,根据二进制编码表将图像边缘梯度方向特征转换为多维特征向量,为每类产品构建用于表述产品特征的边缘梯度方向特征查找表;
18、所述产品相似性检测子模块利用边缘梯度方向特征查找表,计算现场实际采集图像与产品样本数据库中图像的相似度分数,搜索与实测图像最相似的模板,确定目标产品对象;
19、所述基于nms算法的目标产品定位子模块通过nms算法去除冗余目标,获得最终的检测目标。
20、优选地,所述数据管理与应用模块用于航天器ait过程复杂场景图像数据中产品的分类、定位、缺陷检测与质量管控;具体包括:产品图像分类子模块、产品定位子模块、产品缺陷检测子模块以及产品质量控制子模块中的任一种或任多种组合。
21、优选地,所述产品图形快速分类子模块用于产品的快速分类,获取符合条件的图像数据;
22、所述产品精准定位子模块与产品图形快速分类子模块相连接,在产品图像分类的基础上实现各类产品的在复杂场景图像中的精确定位;
23、所述产品缺陷检测子模块用于对接插件插针歪斜、电缆导线弯折、结构板破损在内的相关缺陷进行检测;
24、所述产品质量控制子模块用于对产品的检测数据进行汇总分析,并按照检测数据生成满足需求的产品图像数据包,用于产品质量的追溯。
25、优选地,所述图像采集模块与设备通讯模块连接,通过软硬件api集成接口,实现图像采集设备的在线拍照控制和图像实时采集。
26、优选地,所述设备通讯模块用于服务器与客户端之间的信息传递,通过与图像采集设备、图像采集模块实时通信,实时传输拍照指令信息与图像信息;具体通过局域网,采用web service技术实现服务器与客户端间的信息交互。
27、第三方面,提供了一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现所述航天器ait过程复杂场景产品识别与定位方法的步骤。
28、与现有技术相比,本发明具有如下的有益效果:
29、本发明实现了航天器生产现场多类图像采集设备的接入、图像在线采集、复杂场景中产品图像的快速定位与识别,以及图像数据的管理与应用,有效提高了图像查找追溯效率和准确性,保证了航天器ait过程质量管控。
30、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!