一种基于神经网络的遥感图像厚云区域检测方法与流程
本发明涉及图像数据处理领域,尤其涉及一种基于神经网络的遥感图像厚云区域检测方法。
背景技术:
1、光学遥感图像可以提供对地物信息的丰富观测,然而,云层会对地面信息进行广泛地大面积的遮挡,从而影响对地面信息的估计和观测。因此,对光学遥感图像中的厚云区域覆盖的检测是进一步分析和利用遥感图像信息的基础和关键。
2、传统的遥感图像厚云区域检测方法主要基于光谱阈值策略,该策略通过对遥感图像的不同光谱设置阈值,从而实现了对于厚云的自动检测。该策略无需对遥感图像进行像素级的标签标记,也无需进行复杂的模型训练。然而,基于光谱阈值的方法往往泛化性能较差,对于复杂遥感场景的厚云检测精度较差,对于不同类别场景的遥感图像的检测鲁棒性也不足。近年来,卷积神经网络在各种计算机视觉和遥感图像处理任务中都表现出了突出的效果,这也启发了基于卷积神经网络的遥感图像厚云区域检测方法。如中国发明专利“一种基于deeplabv3+的遥感卫星云检测方法”(cn202010241130.x)公开了一种基于deeplabv3+的遥感卫星云检测方法,将带有云覆盖的遥感图像输入至语义分割网络deeplabv3+中,得到对应的云区检测结果图。在该方法中,引入了空洞卷积和金字塔结构,增大了卷积的感受野,提高了云区检测的精度。再如中国发明专利“基于多尺度卷积神经网络的遥感图像云检测方法”(cn202111108889.1)公开了一种基于多尺度卷积神经网络的遥感图像云检测方法,该方法利用多尺度的卷积与池化操作,提高了对于不同尺寸的云的检测通用性。然而,为了提高遥感图像中厚云区域检测精度,如何在准确确定厚云区域大体位置的同时对云区边缘进行精细,仍然是一个极具困难的问题。
3、目前关于遥感图像厚云区域检测的研究比较多,但是现有的研究一般采用具有单个分支的卷积神经网络进行遥感图像厚云区域检测,未见利用具有多个分支的网络模型分别进行整体厚云检测和云区边缘精细的方法。
技术实现思路
1、本发明的目的在于克服上述一种或多种现有的技术问题,提供一种基于神经网络的遥感图像厚云区域检测方法。
2、为实现上述目的,本发明提供的一种基于神经网络的遥感图像厚云区域检测方法,包括:
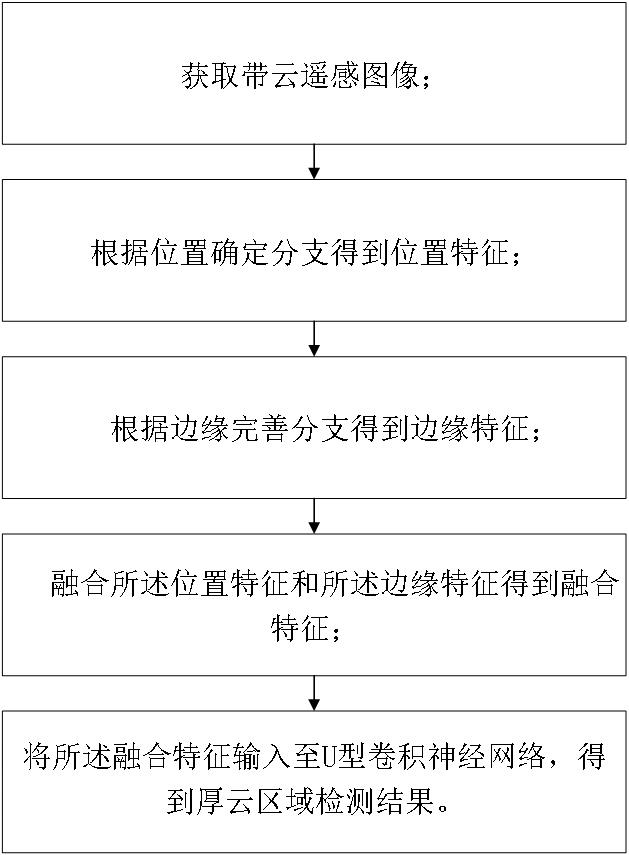
3、获取带云遥感图像;
4、根据位置确定分支得到位置特征;
5、根据边缘完善分支得到边缘特征;
6、融合所述位置特征和所述边缘特征得到融合特征;
7、将所述融合特征输入至u型卷积神经网络,得到厚云区域检测结果。
8、根据本发明的一个方面,所述根据位置确定分支得到位置特征的方法为:
9、将带云遥感图像输入至所述位置确定分支,将输入至所述位置确定分支的带云遥感图像标记为,将依次通过所述压缩模块从而压缩的尺寸,得到,通过所述压缩模块的公式为,
10、;
11、;
12、;
13、;
14、其中,通过第一个压缩模块后的输出;
15、表示通过第二个压缩模块后的输出;
16、表示通过第三个压缩模块后的输出;
17、表示通过第四个压缩模块后的输出;
18、、、和分别表示第一个到第四个压缩模块;
19、将通过所述特征精细模块进行精细得到,与的尺寸相同,通过所述特征精细模块的公式为,
20、 ;
21、其中,表示特征精细模块的输出;
22、表示经过泄漏整流线性激活单元;
23、表示3×3的卷积;
24、叠加和进行特征通道层面的叠加,使得和的特征通道数变为原来的两倍,将和输入至所述重建模块得到所述位置特征,得到所述位置特征的公式为,
25、 ;
26、;
27、;
28、 ;
29、其中,表示第一个重建模块的输出;
30、表示第二个重建模块的输出;
31、表示第三个重建模块的输出;
32、表示位置特征;
33、、、和分别表示第一个到第四个重建模块;
34、表示特征通道层面的叠加操作。
35、根据本发明的一个方面,所述根据边缘完善分支得到边缘特征的方法为:
36、将带云遥感图像输入至所述边缘完善分支,将输入至所述边缘完善分支的带云遥感图像标记为,所述位置确定分支包含九个特征提取模块,所述特征提取模块的特征相同,9个所述特征提取模块的所述扩张卷积单元的扩张率不同,将依次通过所述依次通过前五个所述特征提取模块,得到和,通过前五个所述提取模块的公式为,
37、 ;
38、 ;
39、 ;
40、 ;
41、 ;
42、其中,通过第一个特征提取模块后的输出;
43、表示通过第二个特征提取模块后的输出;
44、表示通过第三个特征提取模块后的输出;
45、表示通过第四个特征提取模块后的输出;
46、表示通过第五个特征提取模块后的输出;
47、、、、和分别表示第一个到第五个特征提取模块;
48、和进行特征通道层面的叠加,使得和的特征通道数变为原来的两倍,将和输入至剩下的提取模块后得到所述边缘特征,得到所述边缘特征的公式为,
49、 ;
50、;
51、 ;
52、;
53、其中,表示通过第六个特征提取模块后的输出;
54、表示通过第七个特征提取模块后的输出;
55、表示通过第八个特征提取模块后的输出;
56、表示边缘特征;
57、、、和分别表示第六个到第九个特征提取模块;
58、表示特征通道层面的叠加操作。
59、根据本发明的一个方面,融合所述位置特征和所述边缘特征得到所述融合特征,根据所述融合特征得到所述u型卷积神经网络,得到所述融合特征的计算公式为,
60、 ;
61、其中,表示融合特征;
62、表示特征通道层面的叠加操作;
63、表示3×3的卷积;
64、表示位置特征;
65、表示带云遥感图像;
66、表示边缘特征。
67、根据本发明的一个方面,使用二元交叉熵损失函数训练对所述u型卷积神经网络进行训练,使用所述二元交叉熵损失函数的计算公式为:
68、 ;
69、其中,表示二元交叉熵损失函数;
70、表示带云遥感图像;
71、表示带云遥感图像的厚云掩码标签;
72、表示输入至u型卷积神经网络得到的结果;
73、表示二元交叉熵计算。
74、为实现上述目的,本发明提供一种基于神经网络的遥感图像厚云区域检测系统,包括:
75、图像获取模块:获取带云遥感图像;
76、位置特征获取模块:根据位置确定分支得到位置特征;
77、边缘特征获取模块:根据边缘完善分支得到边缘特征;
78、融合特征获取模块:融合所述位置特征和所述边缘特征得到融合特征;
79、厚云区域检测模块:将所述融合特征输入至u型卷积神经网络,得到厚云区域检测结果。
80、为实现上述目的,本发明提供一种电子设备,包括处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,计算机程序被处理器执行时实现上述针对一种基于神经网络的遥感图像厚云区域检测方法。
81、为实现上述目的,本发明提供一种计算机可读存储介质,计算机可读存储介质上存储计算机程序,计算机程序被处理器执行时实现上述针对一种基于神经网络的遥感图像厚云区域检测方法。
82、基于此,本发明的有益效果在于:
83、本发明利用并行u型卷积神经网络,采用两个分支分别进行厚云区域整体检测和云区边缘精细,且将两个分支提取到的特征进行合并融合,从而获得检测准确且边缘细化完整的遥感图像厚云区域检测结果。
- 还没有人留言评论。精彩留言会获得点赞!