船舶航行环境风险预测方法、装置、电子设备和介质与流程
本技术涉及船舶航行风险预测的,尤其是涉及一种船舶航行环境风险预测方法、装置、电子设备和介质。
背景技术:
1、随着贸易全球化的不断深入,航运业务日益繁忙,船舶在航行过程中,船舶周围的环境与船舶航行安全密切相关,如恶劣天气、海盗、战区等与船舶周围环境相关航行风险随时可能发生,如果风险预测错误或者风险处理不及时,则可能造成不可估量的损失。
2、目前针对船舶航行环境风险的识别方法,往往是在风险发生后,运营主体对风险地所在的船舶进行报警或指挥,从而搭建船舶航行风险预警机制。但是通过人为判断的方式,容易发生不准确、滞后和低效率的问题,进而导致船舶不能及时获知更为准确的环境风险预测信息,也不能对航行环境风险进行及时处理,影响船舶航行安全。
技术实现思路
1、为了提高船舶环境风险预测的准确性,本技术提供一种船舶航行环境风险预测方法、装置、电子设备和介质。
2、第一方面,本技术提供一种船舶航行环境风险预测方法,采用如下的技术方案:
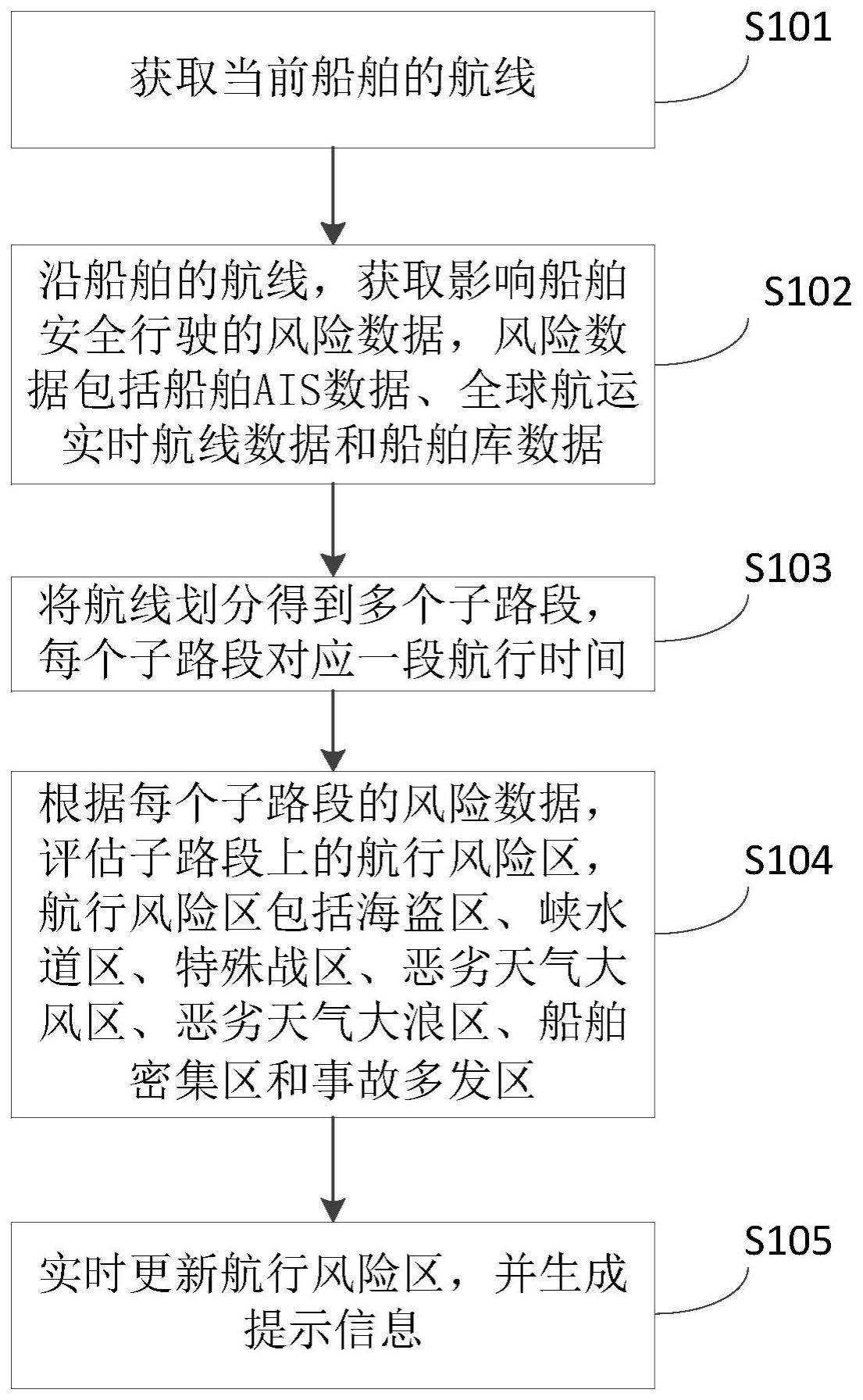
3、获取当前船舶的航线;
4、沿所述当前船舶的航线,获取影响船舶安全行驶的风险数据,所述风险数据包括船舶ais数据、全球航运实时风险数据、船舶库数据和事故多发区数据;
5、将所述航线划分得到多个子路段,每个所述子路段对应一段航行时间;
6、根据每个所述子路段的风险数据,评估所述子路段上的航行风险区,所述航行风险区包括海盗区、峡水道区、特殊战区、恶劣天气大风区、恶劣天气大浪区、船舶密集区和事故多发区。
7、实时更新所述航行风险区,并生成提示信息。
8、通过采用上述技术方案,电子设备获取当前船舶的航线,并获取沿航线上的风险数据,接着将航线划分成多个子路段,根据每个子路段上的风险数据,评估子路段上的航行风险区,并对航行风险区实时更新,能使当前船舶实时获知航线上可能会遇到的航行风险区,通过更全面的风险数据得到更为准确的航行风险区预测结果,进而提高船舶航行安全性。
9、进一步地,所述方法还包括:
10、根据所述航行风险,判断当前船舶的防御能力是否能穿过航行风险区;
11、若不能,则规划能够绕开所述航行风险区的新路线,将所述新路线进行推荐;
12、当所述新路线与其他船舶的航线接近时,生成新路线的限速提示信息。
13、通过采用上述技术方案,电子设备确定当前船舶的航线上遇到航行风险区时,针对自身的防御能力进行评估,决定是否规划新路线,并对新路线与其他船舶的航线进行评判,从而提醒船员调整新路线上的航速,得到更完备且安全的航线。
14、进一步地,所述判断当前船舶的防御能力是否能穿过航行风险区,包括:
15、获取当前船舶上船长资历、船员人数和船体防御能力级别;
16、根据当前船舶上所述船长资历、所述船员人数和所述船体防御能力级别,确定当前船舶的防御能力级别;
17、根据所述当前船舶的防御能力级别,确定可防御的航行风险区;
18、当所述可防御的航行风险区包括所述航线上的航行风险区时,当前船舶的防御能力能够穿过航行风险区。
19、通过采用上述技术方案,电子设备综合考量当前船舶上的人员配置以及船体自身的防御能力,确定船舶的防御能力级别,当船舶的防御能力足以穿过航行风险区时,则无需改变航向,从而更加科学地对当前船舶进行评估。
20、进一步地,当所述当前船舶距离所述船舶密集区达到第一预设距离时,所述方法还包括:
21、确定在以当前船舶为圆心,预设值为半径的圆形范围内各个相邻船舶的航向和航速;
22、根据当前船舶以及相邻船舶的航向和航速,建立数字孪生模型;
23、根据所述数字孪生模型模拟预设时间段内当前船舶和相邻船舶的行驶情况;
24、若所述相邻船舶到达相邻船舶航线与当前船舶航线的交叉点时,在当前船舶前方,且所述相邻船舶与所述当前船舶之间的距离达到警示距离,则在所述相邻船舶与所述当前船舶的距离小于第二预设距离时,生成第一减速提示信息;
25、若所述相邻船舶到达相邻船舶航线与当前船舶航线的交叉点时,所述相邻船舶与所述当前船舶发生冲撞,在所述相邻船舶与所述当前船舶的距离小于第二预设距离时,生成第二减速提示信息;
26、若所述相邻船舶到达相邻船舶航线与当前船舶航线的交叉点时,在当前船舶后方,且所述相邻船舶与所述当前船舶之间的距离达到警示距离,则在所述相邻船舶与所述当前船舶的距离小于第二预设距离时,生成第三提速提示信息;
27、将当前船舶和其他船舶的交叉点确定为事故多发区。
28、通过采用上述技术方案,电子设备建立数字孪生模型,对当前船舶以及相邻船舶的航线进行分析,通过模拟,确定相邻船舶的航线到达与当前船舶的航线交叉点时的状态,来判断是否会接触或碰撞,进而生成提示信息,提示船舶进行提速或减速,从而规避发生事故。
29、进一步地,所述生成第二减速提示信息包括:
30、确定所述当前船舶在开始减速时的初始位置对应的第一时刻;
31、确定相邻船舶到达所述交叉点时的第二时刻,确定所述第一时刻与所述第二时刻的时间差值;获取所述当前船舶与所述相邻船舶在所述第一时刻时的初始航速;
32、确定所述当前船舶由到达目标位置时行驶的距离;
33、根据所述时间差值、所述初始航速和所述距离,计算得到当前船舶降速的加速度;
34、根据所述初始航速、所述加速度和所述距离,计算得到目标速度;
35、生成包括所述目标速度、所述第一时刻以及目标位置的第二减速提示信息。
36、通过采用上述技术方案,电子设备获取当前船舶开始减速时的第一时刻,相邻船舶到达交叉点的第二时刻,确定第一时刻和第二时刻的时间差值,获取当前船舶与相邻船舶在第一时刻的初始航速,确定当前船舶到目标位置时的行驶距离,根据数学计算公式,计算得到加速度,进而得到目标速度,从而得到包括上述信息的第二减速提示信息,能够为当前船舶提供准确全面的第二减速提示信息。
37、在另一种可能的实现方式中,所述方法还包括:
38、当所述航线上,存在预备恶劣天气大风区、预备恶劣天气大浪区和预备船舶密集区的重叠区域时,对所述重叠区域进行标记,所述预备恶劣天气大风区内的风力大于第二预设风力且小于第一预设风力,所述预备恶劣天气大浪区内的浪高大于第二预设浪高且小于第一预设浪高,所述预备船舶密集区内的船舶数量大于第二预设船舶数量且小于第一预设船舶数量;
39、当所述重叠区域内,其他船舶的航速或航向发生变化,则增大对应区域内的事故风险总等级。
40、通过采用上述技术方案,电子设备确定航线上存在预备恶劣天气大风区、预备恶劣天气大浪区和预备船舶密集区的重叠区域后,确定重叠区域内的船舶的航速或航向是否发生变化,若发生变化,则增大区域的事故风险总等级,能够关注事发可能性高的区域,提前预测。
41、进一步地,所述当所述重叠区域内,其他船舶的航速或航向发生变化,则增大对应区域内的事故风险总等级,包括:
42、获取所述重叠区域内的事故船舶数量和船舶总数;
43、计算所述事故船舶数量与所述船舶总数的比值,得到初始事故风险等级;
44、获取所述重叠区域内所有船舶的两组船舶ais数据,分别为当前船舶数据和历史船舶数据,所述船舶ais数据包括航速和航向;
45、根据所述当前船舶数据和所述历史船舶数据,筛选出航速降低、航向远离所述重叠区域的第一船舶;
46、将所述第一船舶的数量与预设的折合比例相乘,计算得到折合船舶数量;
47、计算所述折合船舶数量与所述船舶总数的比值,计算得到增长事故风险等级;
48、将所述初始事故风险等级与所述增长事故风险等级相加,计算得到事故风险总等级。
49、通过采用上述技术方案,电子设备通过两个不同时刻的数据对比,判断重叠区域内的船舶的航速和航向是否变化,进而筛选出第一船舶的数量,根据第一船舶的数量得到折合船舶数量,根据重叠区域内事故船舶数量与船舶总数的比值,得到初始事故风险等级,根据第一船舶数量与船舶总数的比值,计算得到增长事故风险等级,将初始事故风险等级与增长事故风险等级相加,计算得到事故风险总等级,从而更加准确的估算事故风险。
50、在另一种可能的实现方式中,所述方法还包括:
51、用数字孪生模型模拟当前船舶在进入重叠区域后,以所述当前船舶为圆心,预设范围为半径,生成预测区域;
52、根据所述当前船舶在行驶过程中的行驶状况,得到预测区域的多个事故风险总等级,直至所述当前船舶驶离所述重叠区域后结束模拟,所述预测区域的事故风险总等级=所述预测区域内所述事故船舶数量与所述折合船舶数量的和/船舶总数;
53、根据所述多个事故风险总等级,建立曲线图。
54、通过采用上述技术方案,电子设备利用数字孪生模型生成预测区域,模拟当前船舶进入到重叠区域后,预测区域的事故风险总等级的变化情况,并通过曲线图进行提示,为当前船舶提供更加直观的事故风险数据。
55、第二方面,本技术提供一种航行环境风险预测装置,采用如下的技术方案:
56、航线获取模块,用于获取当前船舶的航线;
57、风险数据获取模块,用于沿所述当前船舶的航线,获取影响船舶安全行驶的风险数据,所述风险数据包括船舶ais数据、全球航运实时风险数据、船舶库数据和事故多发区数据;
58、子路段划分模块,用于将所述航线划分得到多个子路段,每个所述子路段对应一段航行时间;航行风险区评估模块,用于根据每个所述子路段的风险数据,评估所述子路段上的航行风险区,所述航行风险区包括海盗区、峡水道区、特殊战区、恶劣天气大风区、恶劣天气大浪区、船舶密集区和事故多发区。
59、提示信息生成模块,用于实时更新所述航行风险区,并生成提示信息。
60、通过采用上述技术方案,航线获取模块获取当前船舶的航线,风险数据获取模块获取沿航线上的风险数据,接着子路段划分模块将航线划分成多个子路段,航行风险区评估模块根据每个子路段上的风险数据,评估子路段上的航行风险区,提示信息生成模块对航行风险区实时更新,能使当前船舶实时获知航线上可能会遇到的航行风险区,通过更全面的风险数据得到更为准确的航行风险区预测结果,进而提高船舶航行安全性。
61、第三方面,本技术提供一种电子设备,采用如下的技术方案:
62、一种电子设备,包括:
63、至少一个处理器;
64、存储器;
65、至少一个应用程序,其中所述至少一个应用程序被存储在所述存储器中并被配置为由所述至少一个处理器执行,所述至少一个应用程序配置用于:执行如第一方面中任一项所述的船舶航行环境风险预测方法。
66、通过采用上述技术方案,处理器执行存储器中存储的应用程序,获取当前船舶的航线,并获取沿航线上的风险数据,接着将航线划分成多个子路段,根据每个子路段上的风险数据,评估子路段上的航行风险区,并对航行风险区实时更新,能使当前船舶实时获知航线上可能会遇到的航行风险区,通过更全面的风险数据得到更为准确的航行风险区预测结果,进而提高船舶航行安全性。
67、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
68、一种计算机可读存储介质,存储有能够被处理器加载并执行如第一方面中任一项所述的船舶航行环境风险预测方法的计算机程序。
69、通过采用上述技术方案,处理器执行计算机可读存储介质中存储的应用程序,获取当前船舶的航线,并获取沿航线上的风险数据,接着将航线划分成多个子路段,根据每个子路段上的风险数据,评估子路段上的航行风险区,并对航行风险区实时更新,能使当前船舶实时获知航线上可能会遇到的航行风险区,通过更全面的风险数据得到更为准确的航行风险区预测结果,进而提高船舶航行安全性。
70、综上所述,本技术包括以下至少一种有益技术效果:
71、1.获取当前船舶的航线,并获取沿航线上的风险数据,接着将航线划分成多个子路段,根据每个子路段上的风险数据,评估子路段上的航行风险区,并对航行风险区实时更新,能使当前船舶实时获知航线上可能会遇到的航行风险区,通过更全面的风险数据得到更为准确的航行风险区预测结果,进而提高船舶航行安全性;
72、2.电子设备确定航线上存在预备恶劣天气大风区、预备恶劣天气大浪区和预备船舶密集区的重叠区域后,确定重叠区域内的船舶的航速或航向是否发生变化,若发生变化,则增大区域的事故风险总等级,能够关注事发可能性高的区域,提前预测。
- 还没有人留言评论。精彩留言会获得点赞!