目标的运动状态的检测方法和设备与流程
1.本技术涉及自动驾驶领域,尤其涉及一种目标的运动状态的检测方法和设备。
背景技术:
2.目标的点云检测是自动驾驶感知领域中关键技术之一。不管是车端的自动驾驶功能,还是云端的自动化标注,都需要估计该目标的运动状态(运动或停止),才能对目标的点云做更进一步的处理。
3.基于点云判断目标的运动状态需要结合时序。也就是要采集连续时刻的点云进行判断,但在连续时刻监测到各帧点云之间的误差较大,例如:采集车辆或者目标位置抖动,采集车辆上传感器的朝向错误,以及目标追踪错误等,这些都会造成各帧点云之间存在误差,这些容易导致运动状态错误分类。
技术实现要素:
4.本技术提供一种目标的运动状态的检测方法和设备,用以解决由于各帧点运之间误差,导致采用目标的连续多帧点云进行运动状态识别容易出现错误识别的技术问题。
5.本技术一实施例提供一种目标的运动状态的检测方法,包括:
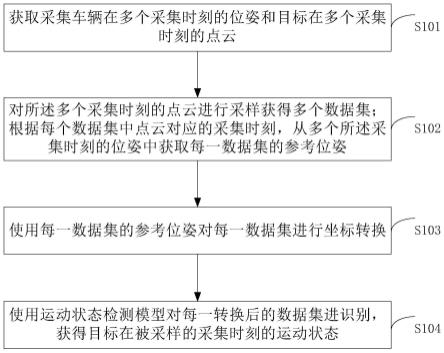
6.获取采集车辆在多个采集时刻的位姿和目标在多个采集时刻的点云;
7.对多个采集时刻的点云进行采样获得多个数据集;从多个采集时刻的位姿中获取每一数据集的参考位姿;
8.使用每一数据集的参考位姿对每一数据集进行坐标转换;
9.使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态。
10.在一实施例中,对多个采集时刻的点云进行采样获得多个数据集,具体包括:
11.使用采样窗口按照采样步长对多个采集时刻的点云进行采样,获得多个数据集;其中,采样步长小于采样窗口的长度,使被采样的采集时刻的点云位于多个数据集中;
12.相应地,使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态,具体包括:
13.使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的至少一个识别结果;
14.对目标在被采样的采集时刻下的至少一个识别结果进行处理,输出目标在被采样的采集时刻下的检测运动状态。
15.在一实施例中,获取目标在多个采集时刻的点云,具体包括:
16.获取采集车辆采集的多个采集时刻的原始点云以及多个采集时刻目标的轮廓数据;
17.使用每一采集时刻目标的轮廓数据对对应时刻的原始点云进行处理,获得目标在每一采集时刻的点云。
18.在一实施例中,方法包括:
19.对每一转换后的数据集进行聚类处理,去除掉聚类区域之外的噪声数据;
20.相应地,使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态,具体包括:
21.使用运动状态检测模型对每一降噪后采样集进行识别,获得目标在被采样的采集时刻下的至少一个识别结果。
22.在一实施例中,从多个采集时刻的位姿中获取每一数据集的参考位姿,具体包括:
23.选取数据集中最早的采集时刻下的位姿作为数据集的参考位姿。
24.在一实施例中,对目标在每一采集时刻的至少一个识别结果进行处理,输出目标在每一时刻的检测运动状态,具体包括:
25.当在某一采集时刻的识别结果仅有一个时,目标在采集时刻的检测运动状态为识别结果;
26.当在某一采集时刻的识别结果有多个时,统计目标在采集时刻的识别结果的状态值,将次数最多的状态值作为目标在采集时刻的检测运动状态。
27.本技术一实施例提供一种目标的运动状态的检测装置,包括:
28.获取模块,用于获取采集车辆在多个采集时刻的位姿和目标在多个采集时刻的点云;
29.处理模块,用于对多个采集时刻的点云进行采样获得多个数据集;从多个采集时刻的位姿中获取每一数据集的参考位姿;使用每一数据集的参考位姿对每一数据集进行坐标转换;以及使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态。
30.本技术一实施例提供一种电子设备,包括:处理器,以及与处理器通信连接的存储器;
31.存储器存储计算机执行指令;
32.处理器执行存储器存储的计算机执行指令,以实现上述实施例中的方法。
33.本技术一实施例一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现上述实施例中的方法。
34.本技术一实施例一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述实施例中的方法。
35.本技术提供的目标的运动状态的检测方法和设备,在获得目标的点云后,通过对多个采集时刻的点云进行采样,获得多个数据集,再以数据集为单位,使用每一数据集的参考位姿对数据集中点云进行坐标转换,再使用坐标转换后的数据集进行运动状态识别,可消除各帧点云之间误差,提升目标运动状态识别准确性。
附图说明
36.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
37.图1为本技术一实施例提供的目标的检测方法的流程图;
38.图2为本技术提供的滑窗采样的原理示意图;
39.图3为本技术一实施例提供的目标的检测装置的示意图;
40.图4为本技术一实施例提供的电子设备的示意图。
41.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
42.这里将详细地对实施例性实施例进行说明,其实施例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
43.如图1所示,图1为本技术一实施例提供的一种目标的运动状态的检测方法,该检测方法包括如下步骤:
44.s101、获取采集车辆在多个采集时刻的位姿和目标在多个采集时刻的点云。
45.其中,使用采集车辆对目标进行连续采集,获取采集车辆在多个采集时刻的位姿和目标在多个采集时刻的点云。位姿包括车辆的位置和车辆的姿态。车辆的位置用三维坐标系中坐标点表示,车辆的姿态用俯仰角、横滚角和航向角表示。
46.以采集车辆采集n个连续时刻为实施例,目标的点云包括n个采集时刻的点云,分别为点云p1、点云p2、
……
点云pn。采集车辆的位姿包括n个采集时刻的位姿,分别位姿e1、位姿e2、
……
位姿en。
47.s102、对多个采集时刻的点云进行采样获得多个数据集;从多个采集时刻的位姿中获取每一数据集的参考位姿。
48.其中,可使用常规的采样方法对多个采集时刻的点云进行采样获得多个数据集。
49.以采样获得m个数据集为例,m个数据集分为数据集q1、数据集q2、
……
数据集qm。每个数据集包含多个点云。
50.以每个数据集中有l个点云为例,数据集中有l个被采样的采集时刻以及l个被采样的采集时刻下的点云,按照采集时刻的先后顺序分别为第1个被采样的采集时刻sp1、第1个被采样的采集时刻sp2、
……
第l个被采样的采集时刻spl。
51.作为一种实施例,根据数据集中被采样的采集时刻,从多个采集时刻的位姿中获取每一数据集的参考位姿。
52.作为一种实施例,可选择每个数据集中最早采集时刻下的位姿作为数据集的参考位姿。
53.以数据集q1中有3个被采样的采集时刻以及3个被采样的采集时刻下的点云为示例,从第1个被采样的采集时刻t1、第1个被采样的采集时刻t3、第3个被采样的采集时刻t3,采集时刻t1早于采集时刻t2,采集时刻t2早于采集时刻t3,则选择采集时刻t1下的位姿作为数据集q1的参考位姿。
54.s103、使用每一数据集的参考位姿对每一数据集进行坐标转换。
55.其中,数据集中采集数据是基于采集车辆上的坐标系,使用每一数据集的参考位姿对每一数据集进行坐标转换,获得参考坐标系下的数据集。
56.在一些实施例中,在对数据集中第i个被采样的采集时刻spi的点云进行坐标转换时,使用第i个被采样的采集时刻spi的位姿和参考位姿对第i个被采样的采集时刻spi的点云进行坐标转换。i为正整数,1≤i≤l。
57.以对数据集q1中采集时刻t1的采集车辆的位姿作为数据集q1的参考位姿示例,数据集q1中包括采集时刻t1的点云、采集时刻t3的点云、以及采集时刻t5的点云。使用采集时刻t3的采集车辆的位姿和数据集q1的参考位姿对采集时刻t3的点云进行坐标转换,得到采集时刻t3的点云在参考坐标系下的数据。
58.s104、使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻的运动状态。
59.其中,运动状态检测模型可以使用常规的机器学习模型,将每个进行坐标转换后的数据集中点云输入到运动状态检测模型中,获得目标在被采样的采集时刻的运动状态。
60.其中,被采样的采集时刻是在对各采集时刻的点云进行采样时,被采样到的采集数据所对应的时刻。
61.在上述技术方案中,在获得目标的点云后,通过对多个采集时刻的点云进行采样,获得多个数据集,再以数据集为单位,使用每一数据集的参考位姿对数据集中点云进行坐标转换,再使用坐标转换后的数据集进行运动状态识别,可消除各帧点云之间误差,提升目标运动状态识别准确性。
62.在一些实施例中,为获取目标在多个采集时刻的点云,获取采集车辆采集的多个采集时刻的原始点云以及多个采集时刻的目标轮廓数据。使用每一采集时刻的目标轮廓数据对对应时刻的原始点云进行处理,最终获得目标在每一采集时刻的点云。
63.可采用现有的方法获取每一采集时刻的目标轮廓数据。目标轮廓数据包括中心点位姿、轮廓的长度、轮廓的宽度以及轮廓的高度,可表示为如下公式:
[0064][0065]
其中,分别表示中心点的坐标,分别表示中心点的俯仰角、横滚角和航向角,li,wi,hi分别表示轮廓的长度、宽度以及高度。
[0066]
更进一步地,基于同一采集时刻的目标轮廓数据和原始点云显示目标轮廓和原始点云,从原始点云中提取位于目标轮廓内数据作为目标点云。以采集获得n个采集时刻的原始点云为例,分别标记为原始点云o1、原始点云o2、
……
原始点云on。n个采集时刻的目标轮廓为目标轮廓c1、目标轮廓c2、
……
目标轮廓cn。
[0067]
从原始点云o1中提取位于目标轮廓c1内的数据,作为目标在采集时刻1的点云。从原始点云q2中提取位于目标轮廓c2内的数据,作为目标在采集时刻2的点云。依次类推,从原始点云qn中提取位于目标轮廓cn内的数据,作为目标在采集时刻n的点云。
[0068]
在该技术方案中,对每一采集时刻的原始点云使用对应时刻的目标轮廓数据进行处理,可以准确获取目标点云。
[0069]
在一些实施例中,在对多个采集时刻的点云进行采样时,使用采样窗口按照采样步长对多个采集时刻的点云进行采样,获得多个数据集。
[0070]
假设时间采样窗口的大小为w,采样步长为s,对n个采集时刻的点云数据进行采样后,得到数据集数量为:
[0071][0072]
其中,n为采集时刻的数量。
[0073]
以某一数据集中包含s个采集时刻为例,第j个数据集qj为:
[0074]
{t
(j-1)s+1
,t
(j-1)s+2
,...,t
js
}
[0075]
其中,t
(j-1)s+1
为数据集qj中第一个被采样的采集时刻,t
(j-1)s+2
为数据集qj中第一个被采样的采集时刻,以此类推,t
js
为数据集qj中第s个被采样的采集时刻。
[0076]
最后一个数据集为:
[0077]
{t
(m-1)s+1
,...,tn}
[0078]
其中,t
(m-1)s+1
为数据集qm中第一个被采样的采集时刻,t
(m-1)s+2
为数据集qm中第二个被采样的采集时刻,以此类推,tn为数据集qm中第s个被采样的采集时刻。
[0079]
在一实施例中,采样步长小于采样窗口的长度,使被采样的采集时刻的点云位于多个数据集中。如图2所示,图2为本技术提供的滑窗采样的原理示意图,以采样窗口的长度为采样步长的三倍为例,黑色填充处的点云经过第(i-1)次采样、第i次采样以及第(i+1)次采样,黑色填充处的点云会出现在第(i-1)次采样的数据集中、第i次采样的数据集中以及第(i+)次采样的数据集中。
[0080]
在一些实施例中,在通过上述方法进行采样获得多个数据集后,对每一数据集进行坐标转换,对每一转换后的数据集进行聚类处理,去除掉聚类区域之外的噪声数据。可使用常规的聚类算法对每一转换后的数据集进行聚类处理。
[0081]
在采样过程中,由于采样窗口的尺寸大于采样步长,则会出现一个采集时刻被多次采样,出现在多个数据集,使用运动状态检测模型对每一降噪后的数据集进识别后,可获得目标在同一被采样的采集时刻下的至少一个识别结果。对目标在被采样的采集时刻下的至少一个识别结果进行处理,输出目标在被采样的采集时刻下的检测运动状态。
[0082]
在一些实施例中,当在某一采集时刻的识别结果仅有一个时,目标在采集时刻的检测运动状态为识别结果。
[0083]
在一些实施例中,当在某一采集时刻的识别结果有多个时,统计目标在采集时刻的识别结果的状态值,将次数最多的状态值作为目标在采集时刻的检测运动状态。
[0084]
以采集时刻t1仅被一次采样,位于在数据集q1中,在使用运动状态识别模型对数据集q1进行处理时,获得采集时刻t5的一个识别结果,若识别结果的状态值为运动,则检测运动状态为运动。若识别结果的状态值为静止,则检测运动状态为静止。
[0085]
以采集时刻t5被多次采样,位于在数据集q3、数据集q4、以及数据集q5中,在使用运动状态识别模型对数据集q3、数据集q4、以及数据集q5分别进行处理时,获得采集时刻t5的三个识别结果。每个识别结果为运动或者停止,三个识别结果分为运动、运动、静止,则检测运动状态为静止,出现运动的次数最多,则检测运动状态为运动。三个识别结果分为运动、静止、静止,出现静止的次数最多,则检测运动状态为静止。
[0086]
在上述技术方案中,通过多个采集时刻的点云进行滑窗采样,且采样窗口大于采样步长,使同一采集时刻的点云被多次采样,出现在多个数据集中,再以数据集为单位,使用每一数据集的参考位姿对数据集中点云进行坐标转换,再使用坐标转换后的数据集进行运动状态识别,在同一采集时刻的至少一个识别结果,对识别结果进行统计后确定目标的
检测运动状态,可消除各帧点云之间误差,提升目标运动状态识别准确性。
[0087]
如图3所示,图3为本技术一实施例提供的目标的检测装置的示意图,本技术一实施例提供一种目标的运动状态的检测装置200,包括:
[0088]
获取模块201,用于获取采集车辆在多个采集时刻的位姿和目标在多个采集时刻的点云;
[0089]
处理模块202,用于对多个采集时刻的点云进行采样获得多个数据集;从多个采集时刻的位姿中获取每一数据集的参考位姿;使用每一数据集的参考位姿对每一数据集进行坐标转换;以及使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态。
[0090]
在一些实施例中,处理模块202,具体用于:
[0091]
使用采样窗口按照采样步长对多个采集时刻的点云进行采样,获得多个数据集;其中,采样步长小于采样窗口的长度,使被采样的采集时刻的点云位于多个数据集中;
[0092]
相应地,使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的运动状态,具体包括:
[0093]
使用运动状态检测模型对每一转换后的数据集进识别,获得目标在被采样的采集时刻下的至少一个识别结果;
[0094]
对目标在被采样的采集时刻下的至少一个识别结果进行处理,输出目标在被采样的采集时刻下的检测运动状态。
[0095]
在一实施例中,获取模块201,具体用于:
[0096]
获取采集车辆采集的多个采集时刻的原始点云以及多个采集时刻目标的轮廓数据;
[0097]
使用每一采集时刻目标的轮廓数据对对应时刻的原始点云进行处理,获得目标在每一采集时刻的点云。
[0098]
在一实施例中,处理模块202还包括:
[0099]
对每一转换后的数据集进行聚类处理,去除掉聚类区域之外的噪声数据;
[0100]
使用运动状态检测模型对每一降噪后采样集进行识别,获得目标在被采样的采集时刻下的至少一个识别结果。
[0101]
在一实施例中,处理模块202,具体用于:
[0102]
选取数据集中最早的采集时刻下的位姿作为数据集的参考位姿。
[0103]
在一实施例中,处理模块202,具体用于:
[0104]
当在某一采集时刻的识别结果仅有一个时,目标在采集时刻的检测运动状态为识别结果;
[0105]
当在某一采集时刻的识别结果有多个时,统计目标在采集时刻的识别结果的状态值,将次数最多的状态值作为目标在采集时刻的检测运动状态。
[0106]
如图4所示,本技术一实施例提供一种电子设备300,电子设备300包括存储器301和处理器302。
[0107]
其中,存储器301用于存储处理器可执行的计算机指令;
[0108]
处理器302在执行计算机指令时实现上述实施例中方法中的各个步骤。具体可以参见前述方法实施例中的相关描述。
[0109]
可选地,上述存储器301既可以是独立的,也可以跟处理器302集成在一起。当存储器301独立设置时,该电子设备还包括总线,用于连接存储器301和处理器302。
[0110]
本技术实施例还提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机指令,当处理器执行计算机指令时,实现上述实施例中方法中的各个步骤。
[0111]
本技术实施例还提供一种计算机程序产品,包括计算机指令,该计算机指令被处理器执行时实现上述实施例中方法中的各个步骤。
[0112]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为实施例性的,本技术的真正范围和精神由下面的权利要求书指出。
[0113]
应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求书来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1