一种串罐连续定量给料系统的制作方法
1.本技术涉及给料技术领域,且更为具体地,涉及一种串罐连续定量给料系统。
背景技术:
2.罐旋转给料泵是一种串罐式连续给料设备,其布置形式为上下串联型。仓罐旋转式给料泵通过转动组件实现仓罐的转动,并在仓罐头部装有挡料板,且仓罐和送料罐内装有导料器,在装料时仓罐旋转,转动的仓罐和设置的挡料板以及所述导料器引导炉料进行下料。
3.但在上述串罐式连续给料设备的工作过程中,却发现偶尔会发生下料堵塞,且无法精准地控制下料的速度使得下料的量难以精准把握。
4.因此,期待一种优化的用于串罐式连续给料设备的连续定量给料控制方案。
技术实现要素:
5.为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种串罐连续定量给料系统,其基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量。
6.相应地,根据本技术的一个方面,提供了一种串罐连续定量给料系统,其包括:监控单元,用于获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频;采样单元,用于从所述下料监控视频提取多个下料监控关键帧;下料静态特征提取单元,用于将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图;下料动态特征提取单元,用于将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图;降维单元,用于对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量;转动数据编码单元,用于将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量;高斯增强单元,用于使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵;响应性估计单元,用于计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;以及给料控制结果生成单元,用于将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应
减小。
7.在上述串罐连续定量给料系统中,所述采样单元,进一步用于以预定采样频率对所述下料监控视频进行采样以得到所述多个下料监控关键帧。
8.在上述串罐连续定量给料系统中,所述下料静态特征提取单元,包括:卷积编码子单元,用于使用所述使用空间注意力的第一卷积神经网络模型的卷积编码部分分别对所述多个下料监控关键帧中各个下料关键帧进行深度卷积编码以得到多个下料卷积特征图;空间编码子单元,用于将所述多个下料卷积特征图中各个下料卷积特征图分别输入所述第一卷积神经网络模型的空间注意力部分以得到多个第一空间注意力图;激活编码子单元,用于将所述多个第一空间注意力图中各个第一空间注意力图分别通过softmax激活函数以得到多个第一空间注意力特征图;以及,注意力施加单元,用于分别计算所述多个第一空间注意力特征图中各个第一空间注意力特征图和所述多个下料卷积特征图中对应的各个下料卷积特征图的按位置点乘以得到所述多个下料特征图。
9.在上述串罐连续定量给料系统中,所述下料动态特征提取单元,进一步用于:所述使用三维卷积核的第二卷积神经网络模型在层的正向传递中对输入数据分别进行:基于所述三维卷积核对所述输入数据进行三维卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的均值池化处理以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述第二卷积神经网络模型的最后一层的输出为所述下料动态特征图,所述第二卷积神经网络模型的第一层的输入为所述多个下料特征图。
10.在上述串罐连续定量给料系统中,所述转动数据编码单元,包括:第一尺度特征提取子单元,用于将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第一卷积层以得到第一尺度转速特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;第二尺度特征提取子单元,用于将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第二卷积层以得到第二尺度转速特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,多尺度级联子单元,用于将所述第一尺度转速特征向量和所述第二尺度转速特征向量进行级联以得到所述多尺度转速特征向量。
11.在上述串罐连续定量给料系统中,所述高斯增强单元,包括:高斯密度图构造子单元,用于以如下公式构造所述多尺度转速特征向量的自高斯密度图;其中,所述公式为:其中,表示所述多尺度转速特征向量,且的每个位置的值表示所述多尺度转速特征向量中相应两个位置的特征值之间的方差;以及,高斯离散化子单元,用于对所述自高斯密度图中各个位置的高斯分布进行高斯离散化以得到转速特征矩阵。
12.在上述串罐连续定量给料系统中,所述响应性估计单元,进一步用于:以如下公式计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;其中,所述公式为:=其中 表示所述下料动态特征向量,表示所述转速特征矩阵, 表示所述分类特征向量, 表示向量与矩阵相乘。
13.在上述串罐连续定量给料系统中,所述给料控制结果生成单元,进一步用于:使用所述分类器以如下公式对所述分类特征向量进行处理以获得所述分类结果,其中,所述公式为: ,其中, 到 为权重矩阵, 到 为偏置向量, 为所述分类特征向量。
14.在上述串罐连续定量给料系统中,还包括用于对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练的训练模块;其中,所述训练模块,包括:训练监控单元,用于获取训练数据,所述训练数据包括预定时间段内多个预定时间点的所述仓罐的训练转动速度值,所述预定时间段的训练下料监控视频,以及,所述当前时间点的仓罐的转速值应增大或应减小的真实值;训练采样单元,用于从所述训练下料监控视频提取多个训练下料监控关键帧;训练下料静态特征提取单元,用于将所述多个训练下料监控关键帧中各个下料关键帧分别通过所述使用空间注意力的第一卷积神经网络模型以得到多个训练下料特征图;训练下料动态特征提取单元,用于将所述多个训练下料特征图通过所述使用三维卷积核的第二卷积神经网络模型以得到训练下料动态特征图;训练降维单元,用于对所述训练下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到训练下料动态特征向量;训练转动数据编码单元,用于将所述预定时间段内多个预定时间点的所述仓罐的训练转动速度值按照时间维度排列为训练转动速度输入向量后通过所述多尺度邻域特征提取模块以得到训练多尺度转速特征向量;训练高斯增强单元,用于使用高斯密度图对所述训练多尺度转速特征向量进行数据增强以得到训练转速特征矩阵;训练响应性估计单元,用于计算所述训练下料动态特征向量相对于所述训练转速特征矩阵的响应性估计以得到训练分类特征向量;分类损失单元,用于将所述训练分类特征向量通过所述分类器以得到分类损失函数值;上下文损失单元,用于计算所述训练下料动态特征向量的上下文统计的局部场景度量损失函数值,所述上下文统计的局部场景度量损失函数值与所述训练下料动态特征向量的所有位置的特征值集合的统计特征有关;以及,训练单元,用于以所述上下文统计的局部场景度量损失函数值和所述分类损失函数值的加权和作为损失函数值对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练。
15.在上述串罐连续定量给料系统中,所述上下文损失单元,进一步用于:以如下公式计算所述训练下料动态特征向量的所述上下文统计的局部场景度量损失函数值;其中,所述公式为:其中 表示所述训练下料动态特征向量的每个位置的特征值, 和 分别表示所述训练下料动态特征向量的所有位置特征集合的均值和方差,且是所述训练下料动态特征向量的长度,表示数值的指数运算,所述数值的指数运算表示计算以所述数值为幂的自然指数函数值。
16.根据本技术的另一方面,还提供了一种串罐连续定量给料方法,其包括:获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的
下料监控视频;从所述下料监控视频提取多个下料监控关键帧;将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图;将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图;对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量;将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量;使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵;计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;以及将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。
17.在上述串罐连续定量给料方法中,所述使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵,包括:以如下公式构造所述多尺度转速特征向量的自高斯密度图;其中,所述公式为:其中, 表示所述多尺度转速特征向量,且 的每个位置的值表示所述多尺度转速特征向量中相应两个位置的特征值之间的方差;以及,对所述自高斯密度图中各个位置的高斯分布进行高斯离散化以得到转速特征矩阵。
18.在上述串罐连续定量给料方法中,还包括用于对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练的训练阶段;其中,所述训练阶段,包括:获取训练数据,所述训练数据包括预定时间段内多个预定时间点的所述仓罐的训练转动速度值,所述预定时间段的训练下料监控视频,以及,所述当前时间点的仓罐的转速值应增大或应减小的真实值;从所述训练下料监控视频提取多个训练下料监控关键帧;将所述多个训练下料监控关键帧中各个下料关键帧分别通过所述使用空间注意力的第一卷积神经网络模型以得到多个训练下料特征图;将所述多个训练下料特征图通过所述使用三维卷积核的第二卷积神经网络模型以得到训练下料动态特征图;对所述训练下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到训练下料动态特征向量;将所述预定时间段内多个预定时间点的所述仓罐的训练转动速度值按照时间维度排列为训练转动速度输入向量后通过所述多尺度邻域特征提取模块以得到训练多尺度转速特征向量;使用高斯密度图对所述训练多尺度转速特征向量进行数据增强以得到训练转速特征矩阵;计算所述训练下料动态特征向量相对于所述训练转速特征矩阵的响应性估计以得到训练分类特征向量;将所述训练分类特征向量通过所述分类器以得到分类损失函数值;计算所述训练下料动态特征向量的上下文统计的局部场景度量损失函数值,所述上下文统计的局部场景度量损失函数值与所述训练下料动态特征向量的所有位置的特征值集合的统计特征有关;以及,以所述上下文统计的局部场景度量损失函数值和所述分类损失函数值的加权和作为损失函数值对所述使用
空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练。
19.与现有技术相比,本技术提供的串罐连续定量给料系统,其基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量。
附图说明
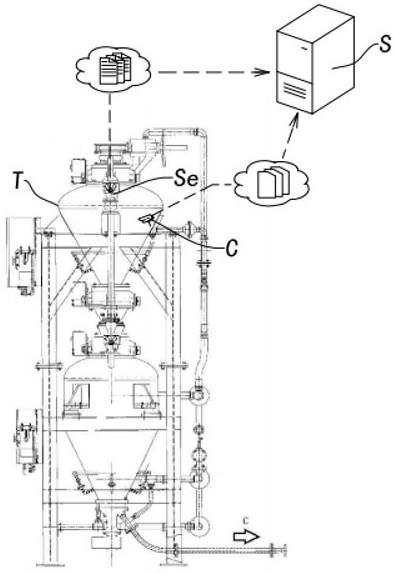
20.图1图示了根据本技术实施例的串罐连续定量给料系统的场景示意图。
21.图2图示了根据本技术实施例的串罐连续定量给料系统的框图。
22.图3图示了根据本技术实施例的串罐连续定量给料系统的架构示意图。
23.图4图示了根据本技术实施例的串罐连续定量给料系统中下料静态特征提取单元的框图。
24.图5图示了根据本技术实施例的串罐连续定量给料系统中训练模块的框图。
25.图6图示了根据本技术实施例的串罐连续定量给料方法的流程图。
26.图7图示了根据本技术实施例的串罐连续定量给料方法中训练阶段的流程图。
具体实施方式
27.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
28.申请概述如上所述,罐旋转给料泵是一种串罐式连续给料设备,其布置形式为上下串联型。仓罐旋转式给料泵通过转动组件实现仓罐的转动,并在仓罐头部装有挡料板,且仓罐和送料罐内装有导料器,在装料时仓罐旋转,转动的仓罐和设置的挡料板以及所述导料器引导炉料进行下料。
29.但在上述串罐式连续给料设备的工作过程中,却发现偶尔会发生下料堵塞,且无法精准地控制下料的速度使得下料的量难以精准把握。因此,期待一种优化的用于串罐式连续给料设备的连续定量给料控制方案。
30.目前,深度学习以及神经网络已经广泛应用于计算机视觉、自然语言处理、语音信号处理等领域。此外,深度学习以及神经网络在图像分类、物体检测、语义分割、文本翻译等领域,也展现出了接近甚至超越人类的水平。
31.近年来,深度学习以及神经网络的发展为串罐式连续给料设备的连续定量给料控制提供了新的解决思路和方案。
32.相应地,考虑到由于在装料时是通过仓罐旋转以引导炉料进行下料,因此,为了能够避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量,需要基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料。也就是,在本技术的技术方案中,对于仓罐转送速度的控制应适配于下料
的状态变化情况,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,以实现炉料下料的智能控制,进而保证下料的正常性。
33.具体地,在本技术的技术方案中,首先,获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频。应可以理解,对于仓罐旋转来引导炉料进行下料工作时,下料的动态变化特征可以通过所述下料监控视频中的相邻图像帧之间的差分来表示,通过相邻图像帧的图像特征来表示下料的动态变化情况。但是,考虑到所述下料监控视频中的相邻帧差异较小,存在大量的数据冗余,因此,为了降低计量算,且避免数据冗余给下料控制带来的不良影响,以预定采样频率对所述下料监控视频进行采样以得到所述多个下料监控关键帧。这里,值得一提的是,所述采样频率可基于实际场景的应用需求做出调整,而不是默认值。
34.然后,考虑到在对于仓罐的转速值进行自适应控制时,应关注于所述串罐式连续给料设备中的炉料的空间位置特征,也就是,突出表示所述炉料在下料时下料口的状态特征以及所述炉料的堆积特征信息,以避免发生下料堵塞。因此,在本技术的技术方案中,进一步通过使用空间注意力的第一卷积神经网络模型分别对所述多个下料监控关键帧中各个下料关键帧进行特征挖掘,以分别提取出所述多个下料监控关键帧中各个下料关键帧中的下料局部空间位置特征在高维空间中的特征分布信息,从而得到多个下料特征图。
35.进一步地,考虑到对于所述多个下料时的空间特征来说,还应在时序上对其进行深层的关联特征挖掘,进而突出所述下料监控视频中关于下料的动态变化特征,以提高仓罐转速控制的精准度。也就是,具体地,将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型中进行处理,以提取出所述炉料在下料时的动态隐含变化特征,从而得到下料动态特征图。接着,再对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量。这样,能够在保留其在时间维度上的动态变化特征不变的基础上降低计算量,防止过拟合,进而便于后续的处理,提高分类的准确性。
36.接着,对于所述仓罐的转动速度在时序上的变化特征来说,首先,将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量以整合其在时间维度上的数据变化信息,然后,将这种变化信息通过多尺度邻域特征提取模块中进行特征提取,以提取出在不同时间跨度下的所述仓罐的转动速度的多尺度邻域关联特征,从而得到多尺度转速特征向量。
37.然后,考虑到所述仓罐的转动速度在时序上的波动性,其对于仓罐的转动速度控制会带来一部分影响,因此为了提高转速控制的精准度,需要在高维特征空间中对于所述转速的动态多尺度邻域关联特征进行数据增强。应可以理解,作为神经网络模型的学习目标,高斯密度图可以表示特征分布的单个特征值由于其概率密度而在多个特征值构成整体分布情况下的联合分布,也就是,以所述仓罐转速值的特征分布作为先验分布,来获得每个先验分布位置下由于其它先验分布位置的相关性作用下的概率密度以作为后验分布,从而在更高维度上更准确地描述这种所述特征分布。因此,具体地,在本技术的技术方案中,可以通过所述转速值的先验分布,即高斯分布,来对于所述转速的动态变化多尺度关联特征进行数据增强。也就是,使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到高斯密度图。然后,对于所述高斯密度图进行高斯离散化处理,以在数据特征增广时不产生
信息损失,从而得到转速特征矩阵。
38.进一步地,就可以计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计来表示所述炉料下料的动态变化特征和所述仓罐转速的动态多尺度邻域关联特征的关联性特征信息,从而得到分类特征向量。然后,将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。也就是,以所述分类特征向量来进行分类处理,以得到用于表示当前时间点的仓罐的转速值应增大或应减小的分类结果。这样,能够准确地基于炉料的下料变化情况来自适应地调整仓罐的转动速度。
39.特别地,在本技术的技术方案中,在对所述下料动态特征图的沿通道维度的各个特征矩阵进行gap处理以得到下料动态特征向量时,由于所述下料动态特征向量的每个位置的特征值是所述下料动态特征图的相应通道位置的特征矩阵的全局均值池化得到的,这使得所述下料动态特征向量的特征值之间的上下文关联性要弱于所述下料动态特征图的沿通道维度的上下文关联性,从而使得所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力变弱,从而影响所述分类特征向量的分类效果。
40.因此,为了提升所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力,在本技术的技术方案中,引入针对所述下料动态特征向量的上下文统计的局部场景度量损失函数,表示为:这里, 和 是特征集合是特征集合是特征集合的均值和方差, 是所述下料动态特征向量 的每个位置的特征值,且是所述下料动态特征向量 的长度。
41.这里,所述上下文统计的局部场景度量损失函数基于所述下料动态特征图的沿通道的每个特征矩阵的全局池化,将所述下料动态特征向量的各个位置的特征值都视为单独的通道特征描述符来作为特征的通道场景的压榨表示,由此,基于特征集合的类概率表达的上下文统计式度量作为损失函数,可以提升各个通道的局部场景的关联性,从而提升所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力。这样,再计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计得到分类特征向量,就可以提升所述分类特征向量的分类效果所述分类特征向量的分类效果。这样,能够基于炉料的下料变化特征来自适应地调整仓罐的转送速度,以对于串罐式连续给料设备进行连续定量的自适应给料控制,从而实现炉料下料的智能控制,保证下料的正常性。
42.基于此,本技术提供了一种串罐连续定量给料系统,其包括:监控单元,用于获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频;采样单元,用于从所述下料监控视频提取多个下料监控关键帧;下料静态特征提取单元,用于将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图;下料动态特征提取单元,用于将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图;降维单元,用于对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量;转动数据编码单元,用于将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多
尺度转速特征向量;高斯增强单元,用于使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵;响应性估计单元,用于计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;以及,给料控制结果生成单元,用于将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。
43.图1图示了根据本技术实施例的串罐连续定量给料系统的场景示意图。如图1所示,在所述串罐连续定量给料系统的应用场景中,首先由测速计(例如,如图1所示意的se)获取预定时间段内多个预定时间点的仓罐(例如,如图1所示意的t)的转动速度值,并由摄像头(例如,如图1所示意的c)获取所述预定时间段的下料监控视频。进而,将所述预定时间段内多个预定时间点的仓罐的转动速度值和所述预定时间段的下料监控视频输入至部署有串罐连续定量给料算法的服务器(例如,如图1所示意的s)中,其中,所述服务器能够以所述串罐连续定量给料算法对所述预定时间段内多个预定时间点的仓罐的转动速度值和所述预定时间段的下料监控视频进行处理以得到用于表示当前时间点的仓罐的转速值应增大或应减小的分类结果概率值。
44.在介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术的各种非限制性实施例。
45.示例性系统图2图示了根据本技术实施例的串罐连续定量给料系统的框图。如图2所示,根据本技术实施例的串罐连续定量给料系统100,包括:监控单元110,用于获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频;采样单元120,用于从所述下料监控视频提取多个下料监控关键帧;下料静态特征提取单元130,用于将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图;下料动态特征提取单元140,用于将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图;降维单元150,用于对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量;转动数据编码单元160,用于将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量;高斯增强单元170,用于使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵;响应性估计单元180,用于计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;以及,给料控制结果生成单元190,用于将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。
46.图3图示了根据本技术实施例的串罐连续定量给料系统的架构示意图。如图3所示,首先获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频。接着,从所述下料监控视频提取多个下料监控关键帧。然后,将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图。进而,将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图,并对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量。接着,将所述预定时间段内多个预定时间点
的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量。然后,使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵,并计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量。进而,将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。
47.在上述串罐连续定量给料系统100中,所述监控单元110,用于获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频。如上所述,罐旋转给料泵是一种串罐式连续给料设备,其布置形式为上下串联型。仓罐旋转式给料泵通过转动组件实现仓罐的转动,并在仓罐头部装有挡料板,且仓罐和送料罐内装有导料器,在装料时仓罐旋转,转动的仓罐和设置的挡料板以及所述导料器引导炉料进行下料。但在上述串罐式连续给料设备的工作过程中,却发现偶尔会发生下料堵塞,且无法精准地控制下料的速度使得下料的量难以精准把握。因此,期待一种优化的用于串罐式连续给料设备的连续定量给料控制方案。
48.目前,深度学习以及神经网络已经广泛应用于计算机视觉、自然语言处理、语音信号处理等领域。此外,深度学习以及神经网络在图像分类、物体检测、语义分割、文本翻译等领域,也展现出了接近甚至超越人类的水平。近年来,深度学习以及神经网络的发展为串罐式连续给料设备的连续定量给料控制提供了新的解决思路和方案。
49.相应地,考虑到由于在装料时是通过仓罐旋转以引导炉料进行下料,因此,为了能够避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量,需要基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料。也就是,在本技术的技术方案中,对于仓罐转送速度的控制应适配于下料的状态变化情况,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,以实现炉料下料的智能控制,进而保证下料的正常性。
50.具体地,在本技术的技术方案中,首先,获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频。其中,所述预定时间段内多个预定时间点的仓罐的转动速度值可以由测速计采集,所述预定时间段的下料监控视频可以由摄像头采集。
51.在上述串罐连续定量给料系统100中,所述采样单元120,用于从所述下料监控视频提取多个下料监控关键帧。应可以理解,对于仓罐旋转来引导炉料进行下料工作时,下料的动态变化特征可以通过所述下料监控视频中的相邻图像帧之间的差分来表示,通过相邻图像帧的图像特征来表示下料的动态变化情况。但是,考虑到所述下料监控视频中的相邻帧差异较小,存在大量的数据冗余,因此,为了降低计量算,且避免数据冗余给下料控制带来的不良影响,以预定采样频率对所述下料监控视频进行采样以得到所述多个下料监控关键帧。
52.具体地,在本技术实施例中,所述采样单元120,进一步用于以预定采样频率对所述下料监控视频进行采样以得到所述多个下料监控关键帧。这里,值得一提的是,所述采样频率可基于实际场景的应用需求做出调整,而不是默认值。
53.在上述串罐连续定量给料系统100中,所述下料静态特征提取单元130,用于将所
述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图。考虑到在对于仓罐的转速值进行自适应控制时,应关注于所述串罐式连续给料设备中的炉料的空间位置特征,也就是,突出表示所述炉料在下料时下料口的状态特征以及所述炉料的堆积特征信息,以避免发生下料堵塞。因此,在本技术的技术方案中,进一步通过使用空间注意力的第一卷积神经网络模型分别对所述多个下料监控关键帧中各个下料关键帧进行特征挖掘,以分别提取出所述多个下料监控关键帧中各个下料关键帧中的下料局部空间位置特征在高维空间中的特征分布信息,从而得到多个下料特征图。
54.具体地,在本技术实施例中,所述下料静态特征提取单元130,进一步用于:通过卷积编码子单元131,使用所述使用空间注意力的第一卷积神经网络模型的卷积编码部分分别对所述多个下料监控关键帧中各个下料关键帧进行深度卷积编码以得到多个下料卷积特征图;通过空间编码子单元132,将所述多个下料卷积特征图中各个下料卷积特征图分别输入所述第一卷积神经网络模型的空间注意力部分以得到多个第一空间注意力图;通过激活编码子单元133,将所述多个第一空间注意力图中各个第一空间注意力图分别通过softmax激活函数以得到多个第一空间注意力特征图;以及,通过注意力施加单元134,分别计算所述多个第一空间注意力特征图中各个第一空间注意力特征图和所述多个下料卷积特征图中对应的各个下料卷积特征图的按位置点乘以得到所述多个下料特征图。
55.图4图示了根据本技术实施例的串罐连续定量给料系统中下料静态特征提取单元的框图。如图4所示,所述下料静态特征提取单元130,包括:卷积编码子单元131,用于使用所述使用空间注意力的第一卷积神经网络模型的卷积编码部分分别对所述多个下料监控关键帧中各个下料关键帧进行深度卷积编码以得到多个下料卷积特征图;空间编码子单元132,用于将所述多个下料卷积特征图中各个下料卷积特征图分别输入所述第一卷积神经网络模型的空间注意力部分以得到多个第一空间注意力图;激活编码子单元133,用于将所述多个第一空间注意力图中各个第一空间注意力图分别通过softmax激活函数以得到多个第一空间注意力特征图;以及,注意力施加单元134,用于分别计算所述多个第一空间注意力特征图中各个第一空间注意力特征图和所述多个下料卷积特征图中对应的各个下料卷积特征图的按位置点乘以得到所述多个下料特征图。
56.在上述串罐连续定量给料系统100中,所述下料动态特征提取单元140,用于将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图。进一步地,考虑到对于所述多个下料时的空间特征来说,还应在时序上对其进行深层的关联特征挖掘,进而突出所述下料监控视频中关于下料的动态变化特征,以提高仓罐转速控制的精准度。也就是,具体地,将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型中进行处理,以提取出所述炉料在下料时的动态隐含变化特征,从而得到下料动态特征图。
57.具体地,在本技术实施例中,所述下料动态特征提取单元140,进一步用于:所述使用三维卷积核的第二卷积神经网络模型在层的正向传递中对输入数据分别进行:基于所述三维卷积核对所述输入数据进行三维卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的均值池化处理以得到池化特征图;以及,对所述池化特征图进行非线性激活以得到激活特征图;其中,所述第二卷积神经网络模型的最后一层的输出为所述下
料动态特征图,所述第二卷积神经网络模型的第一层的输入为所述多个下料特征图。
58.在上述串罐连续定量给料系统100中,所述降维单元150,用于对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量。这样,能够在保留其在时间维度上的动态变化特征不变的基础上降低计算量,防止过拟合,进而便于后续的处理,提高分类的准确性。
59.在上述串罐连续定量给料系统100中,所述转动数据编码单元160,用于将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量。也就是,对于所述仓罐的转动速度在时序上的变化特征来说,首先,将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量以整合其在时间维度上的数据变化信息。然后,将这种变化信息通过多尺度邻域特征提取模块中进行特征提取,以提取出在不同时间跨度下的所述仓罐的转动速度的多尺度邻域关联特征,从而得到多尺度转速特征向量。
60.具体地,在本技术实施例中,所述转动数据编码单元160,包括:第一尺度特征提取子单元,用于将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第一卷积层以得到第一尺度转速特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;第二尺度特征提取子单元,用于将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第二卷积层以得到第二尺度转速特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,多尺度级联子单元,用于将所述第一尺度转速特征向量和所述第二尺度转速特征向量进行级联以得到所述多尺度转速特征向量。
61.在上述串罐连续定量给料系统100中,所述高斯增强单元170,用于使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵。考虑到所述仓罐的转动速度在时序上的波动性,其对于仓罐的转动速度控制会带来一部分影响,因此为了提高转速控制的精准度,需要在高维特征空间中对于所述转速的动态多尺度邻域关联特征进行数据增强。应可以理解,作为神经网络模型的学习目标,高斯密度图可以表示特征分布的单个特征值由于其概率密度而在多个特征值构成整体分布情况下的联合分布,也就是,以所述仓罐转速值的特征分布作为先验分布,来获得每个先验分布位置下由于其它先验分布位置的相关性作用下的概率密度以作为后验分布,从而在更高维度上更准确地描述这种所述特征分布。因此,具体地,在本技术的技术方案中,可以通过所述转速值的先验分布,即高斯分布,来对于所述转速的动态变化多尺度关联特征进行数据增强。也就是,使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到高斯密度图。然后,对于所述高斯密度图进行高斯离散化处理,以在数据特征增广时不产生信息损失,从而得到转速特征矩阵。
62.具体地,在本技术实施例中,所述高斯增强单元170,包括:高斯密度图构造子单元,用于以如下公式构造所述多尺度转速特征向量的自高斯密度图;其中,所述公式为:其中, 表示所述多尺度转速特征向量,且 的每个位置的值表示所述多尺度转速特征向量中相应两个位置的特征值之间的方差;以及,高斯离散化子单元,用于对所述自高斯密度图中各个位置的高斯分布进行高斯离散化以得到转速特征矩阵。
63.在上述串罐连续定量给料系统100中,所述响应性估计单元180,用于计算所述下
料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量。也就是,所述下料动态特征向量相对于所述转速特征矩阵的响应性估计表示所述炉料下料的动态变化特征和所述仓罐转速的动态多尺度邻域关联特征的关联性特征信息,即,分类特征向量。
64.具体地,在本技术实施例中,所述响应性估计单元180,进一步用于:以如下公式计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;其中,所述公式为:=其中 表示所述下料动态特征向量, 表示所述转速特征矩阵, 表示所述分类特征向量, 表示向量与矩阵相乘。
65.在上述串罐连续定量给料系统100中,所述给料控制结果生成单元190,用于将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。也就是,以所述分类特征向量来进行分类处理,以得到用于表示当前时间点的仓罐的转速值应增大或应减小的分类结果。这样,能够准确地基于炉料的下料变化情况来自适应地调整仓罐的转动速度。
66.具体地,在本技术实施例中,所述给料控制结果生成单元190,进一步用于:使用所述分类器以如下公式对所述分类特征向量进行处理以获得所述分类结果,其中,所述公式为: ,其中,到 为权重矩阵, 到为偏置向量, 为所述分类特征向量。
67.在上述串罐连续定量给料系统100中,还包括用于对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练的训练模块200。
68.图5图示了根据本技术实施例的串罐连续定量给料系统中训练模块的框图。如图5所示,所述训练模块200,包括:训练监控单元210,用于获取训练数据,所述训练数据包括预定时间段内多个预定时间点的所述仓罐的训练转动速度值,所述预定时间段的训练下料监控视频,以及,所述当前时间点的仓罐的转速值应增大或应减小的真实值;训练采样单元220,用于从所述训练下料监控视频提取多个训练下料监控关键帧;训练下料静态特征提取单元230,用于将所述多个训练下料监控关键帧中各个下料关键帧分别通过所述使用空间注意力的第一卷积神经网络模型以得到多个训练下料特征图;训练下料动态特征提取单元240,用于将所述多个训练下料特征图通过所述使用三维卷积核的第二卷积神经网络模型以得到训练下料动态特征图;训练降维单元250,用于对所述训练下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到训练下料动态特征向量;训练转动数据编码单元260,用于将所述预定时间段内多个预定时间点的所述仓罐的训练转动速度值按照时间维度排列为训练转动速度输入向量后通过所述多尺度邻域特征提取模块以得到训练多尺度转速特征向量;训练高斯增强单元270,用于使用高斯密度图对所述训练多尺度转速特征向量进行数据增强以得到训练转速特征矩阵;训练响应性估计单元280,用于计算所述训练下料动态特征向量相对于所述训练转速特征矩阵的响应性估计以得到训练分类特征向量;分类损失单元290,用于将所述训练分类特征向量通过所述分类器以得到分类损失函数值;上下文损失单元300,用于计算所述训练下料动态特征向量的上下文统计的局部场
景度量损失函数值,所述上下文统计的局部场景度量损失函数值与所述训练下料动态特征向量的所有位置的特征值集合的统计特征有关;训练单元310,用于以所述上下文统计的局部场景度量损失函数值和所述分类损失函数值的加权和作为损失函数值对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练。
69.特别地,在本技术的技术方案中,在对所述下料动态特征图的沿通道维度的各个特征矩阵进行gap处理以得到下料动态特征向量时,由于所述下料动态特征向量的每个位置的特征值是所述下料动态特征图的相应通道位置的特征矩阵的全局均值池化得到的,这使得所述下料动态特征向量的特征值之间的上下文关联性要弱于所述下料动态特征图的沿通道维度的上下文关联性,从而使得所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力变弱,从而影响所述分类特征向量的分类效果。
70.因此,为了提升所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力,在本技术的技术方案中,引入针对所述下料动态特征向量的上下文统计的局部场景度量损失函数。
71.具体地,在本技术实施例中,所述上下文损失单元300,进一步用于:以如下公式计算所述训练下料动态特征向量的所述上下文统计的局部场景度量损失函数值,其中,所述公式为:其中表示所述训练下料动态特征向量的每个位置的特征值, 和 分别表示所述训练下料动态特征向量的所有位置特征集合的均值和方差,且是所述训练下料动态特征向量的长度,表示数值的指数运算,所述数值的指数运算表示计算以所述数值为幂的自然指数函数值。
72.这里,所述上下文统计的局部场景度量损失函数基于所述下料动态特征图的沿通道的每个特征矩阵的全局池化,将所述下料动态特征向量 的各个位置的特征值都视为单独的通道特征描述符来作为特征的通道场景的压榨表示,由此,基于特征集合的类概率表达的上下文统计式度量作为损失函数,可以提升各个通道的局部场景的关联性,从而提升所述下料动态特征向量对于所述下料动态特征图的上下文特征关联表达能力。这样,再计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计得到分类特征向量,就可以提升所述分类特征向量的分类效果所述分类特征向量的分类效果。这样,能够基于炉料的下料变化特征来自适应地调整仓罐的转送速度,以对于串罐式连续给料设备进行连续定量的自适应给料控制,从而实现炉料下料的智能控制,保证下料的正常性。
73.综上,基于本技术实施例的串罐连续定量给料系统100被阐明,其基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量。
74.如上所述,根据本技术实施例的串罐连续定量给料系统100可以实现在各种终端
设备中,例如用于串罐连续定量给料的服务器等。在一个示例中,根据本技术实施例的串罐连续定量给料系统100可以作为一个软件模块和/或硬件模块而集成到终端设备中。例如,该串罐连续定量给料系统100可以是该终端设备的操作系统中的一个软件模块,或者可以是针对于该终端设备所开发的一个应用程序;当然,该串罐连续定量给料系统100同样可以是该终端设备的众多硬件模块之一。
75.替换地,在另一示例中,该串罐连续定量给料系统100与该终端设备也可以是分立的设备,并且该串罐连续定量给料系统100可以通过有线和/或无线网络连接到该终端设备,并且按照约定的数据格式来传输交互信息。
76.示例性方法图6图示了根据本技术实施例的串罐连续定量给料方法的流程图。如图6所示,根据本技术实施例的串罐连续定量给料方法,包括:s110,获取预定时间段内多个预定时间点的仓罐的转动速度值以及所述预定时间段的下料监控视频;s120,从所述下料监控视频提取多个下料监控关键帧;s130,将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图;s140,将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图;s150,对所述下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到下料动态特征向量;s160,将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量;s170,使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵;s180,计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;以及,s190,将所述分类特征向量通过分类器以得到分类结果,所述分类结果用于表示当前时间点的仓罐的转速值应增大或应减小。
77.在一个示例中,在上述串罐连续定量给料方法中,所述从所述下料监控视频提取多个下料监控关键帧,包括:以预定采样频率对所述下料监控视频进行采样以得到所述多个下料监控关键帧。
78.在一个示例中,在上述串罐连续定量给料方法中,所述将所述多个下料监控关键帧中各个下料关键帧分别通过使用空间注意力的第一卷积神经网络模型以得到多个下料特征图,包括:使用所述使用空间注意力的第一卷积神经网络模型的卷积编码部分分别对所述多个下料监控关键帧中各个下料关键帧进行深度卷积编码以得到多个下料卷积特征图;将所述多个下料卷积特征图中各个下料卷积特征图分别输入所述第一卷积神经网络模型的空间注意力部分以得到多个第一空间注意力图;将所述多个第一空间注意力图中各个第一空间注意力图分别通过softmax激活函数以得到多个第一空间注意力特征图;以及,分别计算所述多个第一空间注意力特征图中各个第一空间注意力特征图和所述多个下料卷积特征图中对应的各个下料卷积特征图的按位置点乘以得到所述多个下料特征图。
79.在一个示例中,在上述串罐连续定量给料方法中,所述将所述多个下料特征图通过使用三维卷积核的第二卷积神经网络模型以得到下料动态特征图,包括:所述使用三维卷积核的第二卷积神经网络模型在层的正向传递中对输入数据分别进行:基于所述三维卷积核对所述输入数据进行三维卷积处理以得到卷积特征图;对所述卷积特征图进行基于局部特征矩阵的均值池化处理以得到池化特征图;以及,对所述池化特征图进行非线性激活
以得到激活特征图;其中,所述第二卷积神经网络模型的最后一层的输出为所述下料动态特征图,所述第二卷积神经网络模型的第一层的输入为所述多个下料特征图。
80.在一个示例中,在上述串罐连续定量给料方法中,所述将所述预定时间段内多个预定时间点的仓罐的转动速度值按照时间维度排列为转动速度输入向量后通过多尺度邻域特征提取模块以得到多尺度转速特征向量,包括:将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第一卷积层以得到第一尺度转速特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;将所述转动速度输入向量输入所述多尺度邻域特征提取模块的第二卷积层以得到第二尺度转速特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,将所述第一尺度转速特征向量和所述第二尺度转速特征向量进行级联以得到所述多尺度转速特征向量。
81.在一个示例中,在上述串罐连续定量给料方法中,所述使用高斯密度图对所述多尺度转速特征向量进行数据增强以得到转速特征矩阵,包括:以如下公式构造所述多尺度转速特征向量的自高斯密度图;其中,所述公式为:其中, 表示所述多尺度转速特征向量,且 的每个位置的值表示所述多尺度转速特征向量中相应两个位置的特征值之间的方差;以及,对所述自高斯密度图中各个位置的高斯分布进行高斯离散化以得到转速特征矩阵。
82.在一个示例中,在上述串罐连续定量给料方法中,所述计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量,包括:以如下公式计算所述下料动态特征向量相对于所述转速特征矩阵的响应性估计以得到分类特征向量;其中,所述公式为: =其中 表示所述下料动态特征向量, 表示所述转速特征矩阵, 表示所述分类特征向量, 表示向量与矩阵相乘。
83.在一个示例中,在上述串罐连续定量给料方法中,所述将所述分类特征向量通过分类器以得到分类结果,包括:使用所述分类器以如下公式对所述分类特征向量进行处理以获得所述分类结果,其中,所述公式为: ,其中, 到 为权重矩阵, 到 为偏置向量,为所述分类特征向量。
84.在一个示例中,在上述串罐连续定量给料方法中,还包括用于对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练的训练阶段。
85.图7图示了根据本技术实施例的串罐连续定量给料方法中训练阶段的流程图。如图7所示,所述训练阶段,包括:s210,获取训练数据,所述训练数据包括预定时间段内多个预定时间点的所述仓罐的训练转动速度值,所述预定时间段的训练下料监控视频,以及,所述当前时间点的仓罐的转速值应增大或应减小的真实值;s220,从所述训练下料监控视频提取多个训练下料监控关键帧;s230,将所述多个训练下料监控关键帧中各个下料关键帧分别通过所述使用空间注意力的第一卷积神经网络模型以得到多个训练下料特征图;s240,将所述多个训练下料特征图通过所述使用三维卷积核的第二卷积神经网络模型以得
到训练下料动态特征图;s250,对所述训练下料动态特征图的沿通道维度的各个特征矩阵进行全局均值池化处理以得到训练下料动态特征向量;s260,将所述预定时间段内多个预定时间点的所述仓罐的训练转动速度值按照时间维度排列为训练转动速度输入向量后通过所述多尺度邻域特征提取模块以得到训练多尺度转速特征向量;s270,使用高斯密度图对所述训练多尺度转速特征向量进行数据增强以得到训练转速特征矩阵;s280,计算所述训练下料动态特征向量相对于所述训练转速特征矩阵的响应性估计以得到训练分类特征向量;s290,将所述训练分类特征向量通过所述分类器以得到分类损失函数值;s300,计算所述训练下料动态特征向量的上下文统计的局部场景度量损失函数值,所述上下文统计的局部场景度量损失函数值与所述训练下料动态特征向量的所有位置的特征值集合的统计特征有关;以及,s310,以所述上下文统计的局部场景度量损失函数值和所述分类损失函数值的加权和作为损失函数值对所述使用空间注意力的第一卷积神经网络模型、所述使用三维卷积核的第二卷积神经网络模型、所述多尺度邻域特征提取模块和所述分类器进行训练。
86.在一个示例中,在上述串罐连续定量给料方法中,所述计算所述训练下料动态特征向量的上下文统计的局部场景度量损失函数值,包括:以如下公式计算所述训练下料动态特征向量的所述上下文统计的局部场景度量损失函数值;其中,所述公式为:其中 表示所述训练下料动态特征向量的每个位置的特征值, 和 分别表示所述训练下料动态特征向量的所有位置特征集合的均值和方差,且 是所述训练下料动态特征向量的长度, 表示数值的指数运算,所述数值的指数运算表示计算以所述数值为幂的自然指数函数值。
87.综上,本技术实施例的串罐连续定量给料方法被阐明,其基于下料情况来自适应地控制仓罐的转送速度,从而使得下料速度保持在相对稳定的状态,保证连读定量给料,也就是,基于炉料的下料变化特征来自适应地调整仓罐的转动速度,这样能够对于串罐式连续给料设备进行连续定量的自适应给料控制,避免在下料时发生下料堵塞,同时还能够精准地控制下料速度以及下料的量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1