一种智能定位方法及电子设备与流程
本发明涉及安防监控,尤其是涉及一种智能定位方法及电子设备。
背景技术:
1、随着智能定位技术的不断进步,人体定位也得到了越来越多的应用。目前常见方案都是采用传统手环区域定位方式,或者人脸以及人形识别的智能区域定位,这些传统区域定位,在3d地图上的显示只能默认显示在中央。当区域比较大,并且区域的杂物比较多时,容易发生危险时,用户迫切需要在3d地图上知道目标具体位置,来预判可能发生的事情,但现有技术的定位精度难以满足。
技术实现思路
1、本发明的目的在于提供一种智能定位方法及电子设备,解决了现有技术的定位精度较低的问题。
2、第一方面,本发明提供一种智能定位方法,包括:
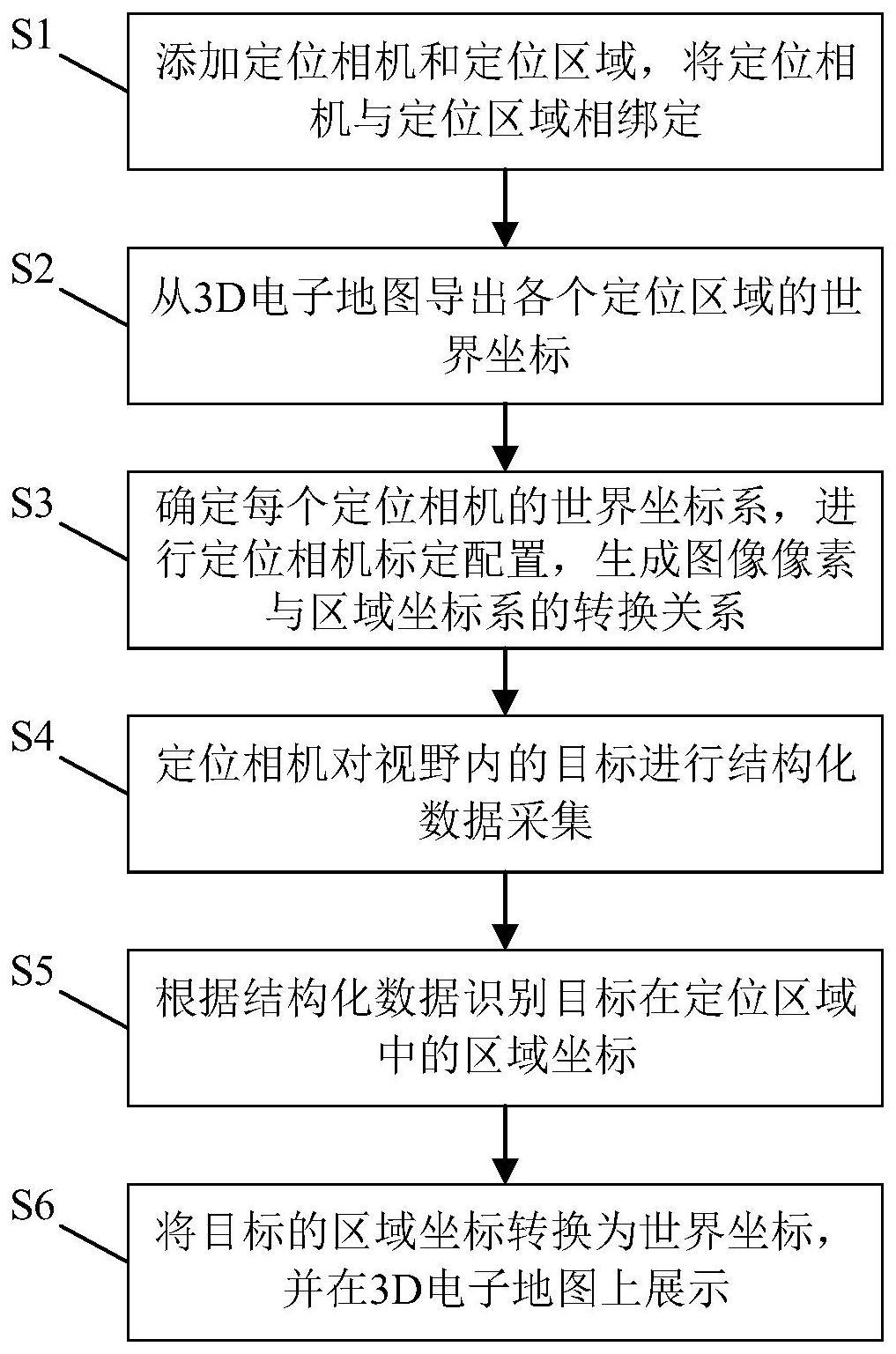
3、添加定位相机和定位区域,将定位相机与定位区域相绑定;
4、从3d电子地图导出各个定位区域的世界坐标;
5、确定每个定位相机的世界坐标系,进行定位相机标定配置,生成图像像素与区域坐标系的转换关系;
6、定位相机对视野内的目标进行结构化数据采集;
7、根据结构化数据识别目标在定位区域中的区域坐标;
8、将目标的区域坐标转换为世界坐标,并在3d电子地图上展示。
9、进一步的,从3d电子地图导出各个定位区域的世界坐标的步骤,包括:
10、从3d电子地图导出各个定位区域的边界坐标,以及相邻定位区域之间的连接点坐标。
11、进一步的,确定每个定位相机的世界坐标系,进行定位相机标定配置,生成图像像素与区域坐标系的转换关系的步骤,包括:
12、确定每个定位相机在对应的定位区域中的世界坐标系;
13、对每个定位相机进行标定配置,生成图像像素与区域坐标系的转换关系。
14、进一步的,确定每个定位相机的区域坐标,以及图像像素与区域坐标系的转换关系的步骤之后,还包括:
15、获取目标的人员信息,并进行目标建模。
16、进一步的,定位相机对视野内的目标进行结构化数据采集的步骤,包括:
17、目标出现在定位相机视野画面后,定位相机采集目标的建模信息,并根据建模信息生成结构化数据。
18、进一步的,所述结构化数据包括目标图像、目标相关属性和高精度坐标。
19、第二方面,本发明还提供一种电子设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
20、第三方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可运行指令,所述计算机可运行指令在被处理器调用和运行时,所述计算机可运行指令促使所述处理器运行所述方法。
21、本发明提供的智能定位方法,首先添加定位相机和定位区域,将定位相机与定位区域相绑定,并从3d电子地图导出各个定位区域的世界坐标,确定每个定位相机的区域坐标,以及图像像素与区域坐标系的转换关系。当目标出现在定位相机的视野中后,定位相机对视野内的目标进行结构化数据采集,根据结构化数据识别目标在定位区域中的区域坐标,将目标的区域坐标转换为世界坐标,并在3d电子地图上展示,采用3d模型的唯一坐标与定位相机画面像素关系映射,来计算出3d地图上的绝对坐标,实现了高精度的目标定位,解决了现有技术的定位精度较低的问题。
22、相应地,本发明实施例提供的电子设备及计算机可读存储介质,也同样具有上述技术效果。
技术特征:
1.一种智能定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,从3d电子地图导出各个定位区域的世界坐标的步骤,包括:
3.根据权利要求1所述的方法,其特征在于,确定每个定位相机的世界坐标系,进行定位相机标定配置,生成图像像素与区域坐标系的转换关系的步骤,包括:
4.根据权利要求1所述的方法,其特征在于,确定每个定位相机的区域坐标,以及图像像素与区域坐标系的转换关系的步骤之后,还包括:
5.根据权利要求4所述的方法,其特征在于,定位相机对视野内的目标进行结构化数据采集的步骤,包括:
6.根据权利要求5所述的方法,其特征在于,所述结构化数据包括目标图像、目标相关属性和高精度坐标。
7.一种电子设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述权利要求1至6任一项所述的方法的步骤。
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可运行指令,所述计算机可运行指令在被处理器调用和运行时,所述计算机可运行指令促使所述处理器运行所述权利要求1至6任一项所述的方法。
技术总结
本发明提供了一种智能定位方法及电子设备,属于安防监控的技术领域,解决了现有技术的定位精度较低的问题。该智能定位方法包括:添加定位相机和定位区域,将定位相机与定位区域相绑定;从3D电子地图导出各个定位区域的世界坐标;确定每个定位相机的世界坐标系,进行定位相机标定配置,生图像像素与区域坐标系的转换关系;定位相机对视野内的目标进行结构化数据采集;根据结构化数据识别目标在定位区域中的区域坐标;将目标的区域坐标转换为世界坐标,并在3D电子地图上展示。
技术研发人员:薛超,陈东亮,王洪涛,陈澎祥,冯国涛,黄凯
受保护的技术使用者:天津天地伟业信息系统集成有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!