不规则复杂建筑物三维模型重建方法及装置与流程
本发明涉及三维重建。更具体地说,本发明涉及一种不规则复杂建筑物三维模型重建方法及装置。
背景技术:
1、随着点云获取硬件设备技术的发展进步,人们很容易获得各种数据来源的建筑点云数据,这些三维点云能够表达建筑的坐标信息和几何信息,广泛用于建筑模型的三维重建。虽然目前国内外学者在真实世界建筑点云的模型构建方面已有较为广泛的研究并取得了一定的成果,但是仍存在以下几点不足:
2、(1)多数流行的建筑三维重建方法都局限于曼哈顿世界模型假设下的建筑重建,不适用于不规则的建筑三维模型构建,缺乏通用性。另外一些重建方法虽然能够很好表达不规则建筑模型,但是构建的三角网面片过于稠密,不符合模型轻量化要求。
3、(2)由于建筑结构的复杂性,通过各种手段获取的点云数据不可避免的存在噪声,信息缺失等问题,这给模型重建工作带来了很大的困难。从非理想结构化点云中重建出高精度、流形和拓扑结构正确的真实世界不规则建筑模型仍然存在困难。
技术实现思路
1、本发明的一个目的是提供一种不规则复杂建筑物三维模型重建方法及装置,以解决上述问题。
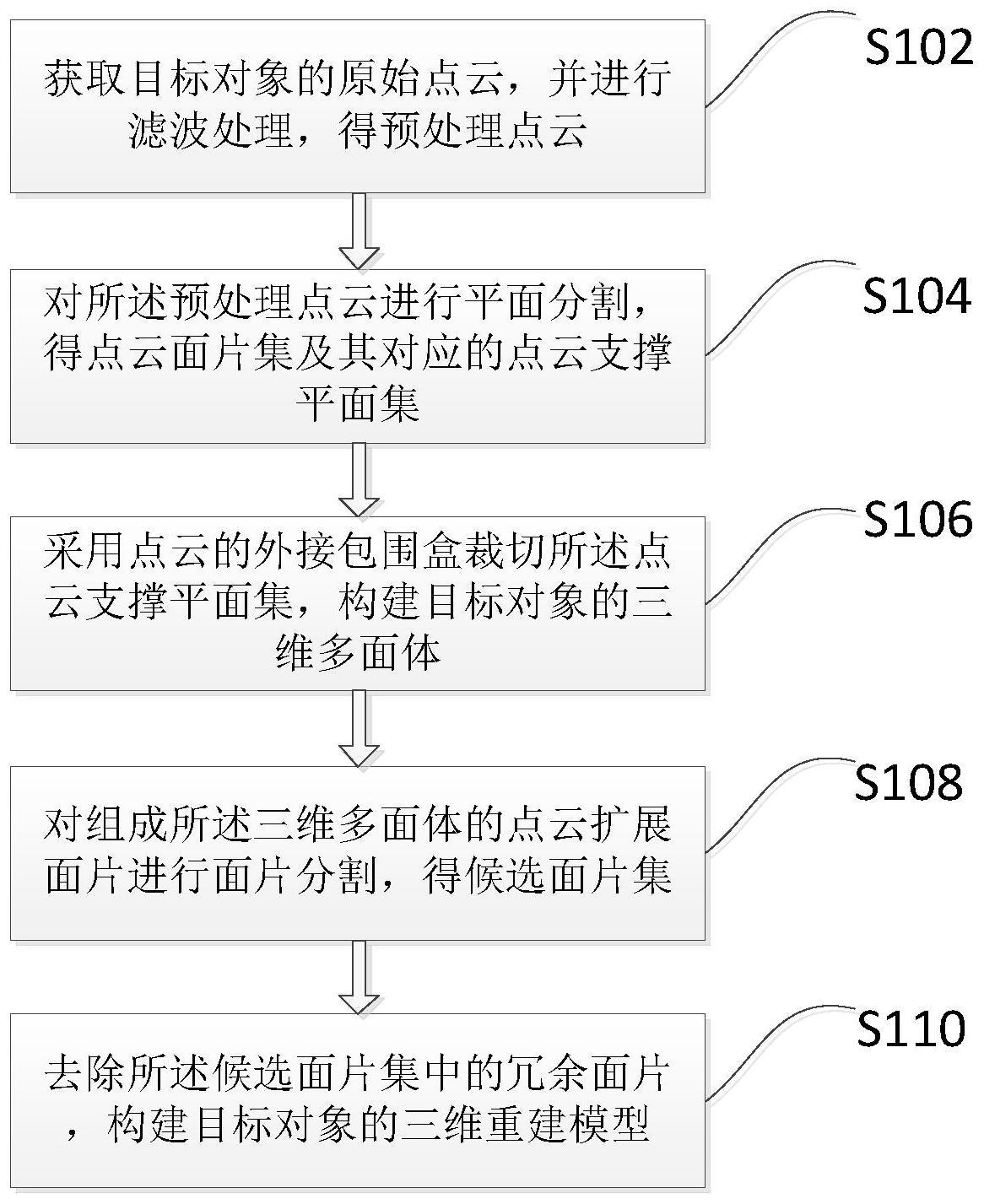
2、为了实现本发明的目的和其它优点,提供了一种不规则复杂建筑物三维模型重建方法,包括:获取目标对象的原始点云,并进行滤波处理,得预处理点云;对所述预处理点云进行平面分割,得点云面片集及其对应的点云支撑平面集;采用点云的外接包围盒裁切所述点云支撑平面集,构建目标对象的三维多面体;对组成所述三维多面体的点云扩展面片进行面片分割,得候选面片集;去除所述候选面片集中的冗余面片,构建目标对象的三维重建模型。
3、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述滤波处理包括:采用八连通域算法,去除所述原始点云的离群点;采用基于八叉树的点云下采样,对去除离群点后的点云进行简化。
4、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述对所述预处理点云进行平面分割,得点云面片集及其对应的点云支撑平面集,包括:采用基于one-pointransac的平面分割算法对所述预处理点云进行平面分割;将经平面分割后获得的初始点云面片集进行迭代细化处理,得所述点云面片集及其对应的点云支撑平面集。
5、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述采用点云的外接包围盒裁切所述点云支撑平面集,构建目标对象的三维多面体,包括:计算所述原始点云的外接包围盒,将该外接包围盒的边长进行扩充,扩充半径为r,得扩充后的外接包围盒;以所述扩充后的外接包围盒裁切所述点云支持平面集,计算每个支撑平面与所述扩充后的外接包围盒的交点,并保存裁切后的交点、边和面片以及三者的关联关系,得到由所述点云扩展面片构成的所述目标对象的三维多面体。
6、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述对组成所述三维多面体的点云扩展面片进行面片分割,得候选面片集,包括:将组成所述三维多面体的每个点云扩展面片用与其相交的点云扩展面片进行分割,每次分割后,被分割的点云扩展面片不再存在,而是被分割成多个候选面片部分,每个候选面片部分再次被与其相交的点云扩展面片分割,直至不满足分割条件,得所述候选面片集。
7、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述去除所述候选面片集中的冗余面片,构建目标对象的三维重建模型,包括:建立以点云拟合度、点云覆盖率和模型复杂度为参考因素的目标函数;以一个边有且只能关联两个面片,以及,如果一个边为锐利边,则该边必须首先被选择为约束条件,对所述目标函数求解,得近似目标对象的面片集;将所述近似目标对象的面片集进行组合,得所述目标对象的三维重建模型。
8、优选的是,所述的不规则复杂建筑物三维模型重建方法,所述目标函数,具体为:
9、
10、上式中,x代表所求的未知数,ef为点云拟合度,ec为点云覆盖率,em为模型复杂度,λf、λc、λm为对应ef、ec、em的权重系数;其中,
11、
12、
13、
14、上式中,|p|为输入的所述预处理点云p中总的点云数量,n为所述候选面片集中的候选面片数量,xi为候选面片的二元变量,若该候选面片被保留,则xi=1,否则xi=0,s(fi)为候选面片fi中点云的质量,b(m)为最终模型m的表面积,b(fi)为候选面片fi的面积,
15、为投影到面片fi上的点云构建α-shape网格的表面面积,|e|为候选面片两两分割得到的总的边的数量,c(ei)是一个指标函数,它的值由边ei关联的两个候选面片的结构来决定,若两个候选面片共面,则该函数值为0,否则该函数值为1。
16、本发明还提供了一种不规则复杂建筑物三维模型重建装置,包括:预处理模块,其用于获取目标对象的原始点云,并进行滤波处理,得预处理点云;平面提取模块,其用于对所述预处理点云进行平面分割,得点云面片集及其对应的点云支撑平面集;裁切模块,其用于采用点云的外接包围盒裁切所述点云支撑平面集,构建目标对象的三维多面体;面片分割模块,其用于对组成所述三维多面体的点云扩展面片进行面片分割,得候选面片集;去冗余模块,其用于去除所述候选面片集中的冗余面片,构建目标对象的三维重建模型。
17、本发明还提供了一种存储介质,其中存储有计算机程序,所述计算机程序被处理器加载执行时,实现如权利要求1-7任一所述的不规则复杂建筑物三维模型重建方法。
18、本发明还提供了一种电子设备,包括:处理器、及存储器;其中,所述存储器用于存储计算机程序;所述处理器用于加载执行所述计算机程序,以使所述电子设备执行如权利要求1-7任一所述的不规则复杂建筑物三维模型重建方法。
19、本发明至少包括以下有益效果:
20、第一、针对获取的点云数据存在的离群点和噪声点问题,本发明采用一种改进的八连通域算法,去除离群点,该方法与常用的统计滤波和高斯滤波等方法相比更能有效的去除离群点,保留建筑主体结构点云。
21、第二、针对点云的平面分割,本发明提出一种在点云采样的基础上,基于一个点及其法向量的随机平面分割方法--one-point ransac,相比于传统ransac分割,对平面的拟合准确度更高,对具有异常值和噪声的点云数据有更好的鲁棒性和效率,而且在小范围局部区域也有很好的效果,为后续的模型重建奠定了基础。
22、第三、针对目前三维模型重建过程中出现的模型紧密型差,点云鲁棒性不强,模型三角网稠密和拓扑关系不正确的问题,本发明的方法从全局的角度出发,首先获取点云的平面集和支撑平面集,然后用点云外接包围盒裁切点云支撑平面集,得到目标对象的超集--三维多面体(3d-polyhedron),再用平面之间两两相互切割得到候选面片集,因为在切割过程中会产生并不代表建筑实际结构的冗余面片,通过构建一个二元线性规划方程,使用scip求解器,对目标函数求解,去掉冗余的面片,最终得到近似目标对象表面的三维模型,相比于其他三维重建方法,本发明的方法能够很好的解决不规则复杂建筑三维模型的重建,模型与点云的贴合较好,模型拓扑结构关系正确,三角网面片数量较少,占用较少内存资源,且对杂乱,信息缺失点云具有很好的鲁棒性。
23、第四、本发明提出了一种从点云到建筑物三维模型的完整技术方案,并在多种类型的数据集上对该方案进行了验证,结果表明,本发明的方法能够很好的完成对不规则复杂建筑的三维模型构建,在模型三角网轻量化和模型的拓扑结构正确性方面与其它重建方法相比具有很好的优越性。
24、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!