一种元宇宙空间中虚拟世界场景生成方法及系统与流程
1.本发明属于虚拟现实技术领域,具体涉及一种元宇宙空间中虚拟世界场景生成方法及系统。
背景技术:
2.目前,元宇宙是集体的虚拟共享空间,尽管元宇宙空间中的虚拟世界场景是基于数字孪生技术生成现实世界的镜像,也有虚拟的世界镜像,但是大型的元宇宙空间的场景来源于不同的空间服务器,然后拼接而成,如果各个元宇宙的场景的接缝位置差异过大,则会产生虚拟世界的场景切换过于生硬的问题,令使用用户失去真实的沉浸式体验感,各个空间服务器的场景的来源很多都是独立开发的,开发环境和场景来源的差异不可避免的会导致各个空间服务器的场景之间产生较大差异,例如有一个空间服务器的场景是三维重建获取,另一个空间服务器的场景是根据三维扫描或者三维建模得到,则二者之间不可避免的会产生差异,在使用者经过两个场景接缝时有突然曝光情况或是场景模型整个颜色突然改变然后又突然变回来、场景的接缝之间于虚拟现实中的近处看会出现明显不协调等一系列的问题,因此场景之间的匹配关系很弱,从而使元宇宙的用户丧失沉浸感体验。
技术实现要素:
3.本发明的目的在于提出一种元宇宙空间中虚拟世界场景生成方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
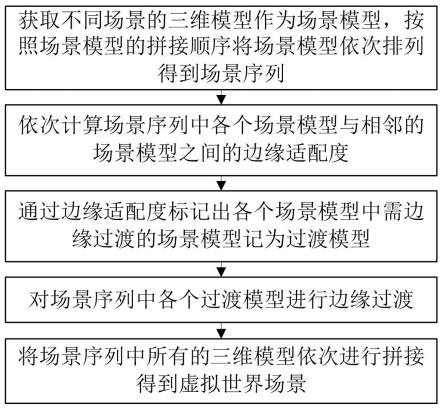
4.为了实现上述目的,根据本发明的一方面,提供一种元宇宙空间中虚拟世界场景生成方法,所述方法包括以下步骤:s100,获取不同场景的三维模型作为场景模型,按照场景模型的拼接顺序将场景模型依次排列得到场景序列;s200,依次计算场景序列中各个场景模型与相邻的场景模型之间的边缘适配度;s300,通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型;s400,对场景序列中各个过渡模型进行边缘过渡;s500,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
5.优选地,将虚拟世界场景输出到虚拟现实头盔进行显示。
6.进一步地,在s100中,不同场景的三维模型为:以三维建模或者三维扫描获取到场景的三维模型作为场景模型,或者对场景进行拍照并进行三维重建获得的三维模型作为场景模型;所述场景为预设区域的建筑物、树木、交通工具和/或地理环境。
7.其中,不同场景的三维模型源自于不同的元宇宙服务器中。
8.优选地,元宇宙服务器的硬件为异构服务器;元宇宙服务器的软件包括用于结构、感知、控制仿真的simulation sdks,用于渲染、实时光追、ai降噪的sdks,通过sdks的kit功能将这些不同的sdk进行模块化的组合,快速完成定制化app或者微服务的开发,用于建模
和渲染的create,用于可视化的view,还包括数据库和协作引擎nucleus,建模工具互联插件connect,connect用于支持与各个连接到元宇宙服务器的客户端上安装的3ds max、ue、maya等软件互联。
9.进一步地,在s100中,场景模型的拼接顺序为以首个获取到的场景模型开始,按照从所述场景模型到各个场景之间在虚拟场景互相拼接的顺序。
10.优选地,在s100中,场景模型的拼接顺序为以获取场景模型的时间顺序作为场景模型的拼接顺序。
11.进一步地,在s200中,计算场景模型与相邻的场景模型之间的边缘适配度的方法包括以下步骤:记场景序列中场景模型的数量为n,取i为场景序列中场景模型的序号,取i∈[2,n-1],以l(i)为第i个场景模型和第i-1个场景模型之间的拼接边缘线;以r(i)为第i个场景模型和第i+1个场景模型之间的拼接边缘线;所述拼接边缘线为两个场景模型合并后的共同的边缘线(即两个场景模型准备合并位置的边缘线或者两个场景模型准备接合处位置的边缘线);在i的取值范围内,依次计算第i个场景模型与相邻的场景模型之间的边缘适配度suit(i)为:;其中,j为变量,meang函数是取拼接边缘线上所有像素点的灰度值的均值;ln是指自然对数,mart(i,j)是场景序列中第i个场景模型和第j个场景模型之间的像素亮差度,其计算方法为:mart(i,j)=|maxg(l(i))-maxg(l(j))|-|maxg(l(i))-maxg(r(j))|;其中,maxg函数是取拼接边缘线上所有像素点的灰度值中的最大值;l(j)是第j个场景模型和第j-1个场景模型之间的拼接边缘线;r(j)是第j个场景模型和第j+1个场景模型之间的拼接边缘线。
[0012]
其有益效果为:通过像素亮差度计算获得的以上边缘适配度,能够很好的凸显出场景模型与相邻的场景模型之间的边缘的亮度适配程度,能够凸显在虚拟现实环境下的场景接缝处的微弱差别,根据当前场景模型与周边场景模型的共同的边缘线上灰度变化趋势以区分出他们之间差异特征。
[0013]
进一步地,在s300中,通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型的方法为:取所有场景模型与相邻的场景模型之间的边缘适配度的均值为suitmean;在i的取值范围内,当第i个场景模型与相邻的场景模型之间的边缘适配度suit(i)<suitmean则判断该场景模型需边缘过渡并将该场景模型记为过渡模型。
[0014]
进一步地,在s400中,对场景序列中各个过渡模型进行边缘过渡的方法为:记场景序列中各个过渡模型的数量为n2,取k为场景序列中过渡模型的序号,取k∈[2,n2-1],获取第k个过渡模型在场景序列中对应的场景模型的序号为k(i);筛选过渡模型的待过渡区域,具体方法为:以l(k(i))为第k个过渡模型和第k(i)-1个场景模型之间的拼接边缘线;以r(k(i))为第k个过渡模型和第k(i)+1个场景序列之间的拼接边缘线;分别对l(k(i))和r(k(i))进行角点检测获得角点,取l(k(i))上灰度值最大的角点为max_lk,取r(k(i))上灰度
值最大的角点为max_rk;取max_lk和max_rk的中点在第k个过渡模型上投影点记为深度点pj(k),或者,取max_lk和max_rk的中点到第k个过渡模型上各像素点的距离中最短距离的点记为深度点pj(k),以max_lk、max_rk和pj(k)三个点互相连接形成的三角形的外接圆为cyc1;取cyc1范围内的第k个过渡模型的区域记为第k个过渡模型的待过渡区域trend(k);对各个过渡模型的待过渡区域进行边缘过渡,具体为:记cyc1(p)为待过渡区域中的第p个像素点,p为待过渡区域中的像素点序号,在p范围内遍历所有cyc1(p)进行边缘过渡,具体为:计算像素点cyc1(p)的灰度值和max_lk的灰度值之间的差值的绝对值a(p),计算像素点cyc1(p)的灰度值和max_rk的灰度值之间的差值的绝对值b(p),如果a(p)>b(p),则将像素点cyc1(p)的像素值减少|maxp(l(k(i)))-maxp(r(k(i)))|,否则将像素点cyc1(p)的像素值增加|minp(l(k(i)))-minp(r(k(i)))|;其中,maxp函数是取拼接边缘线上所有像素点的像素值中的最大值;minp函数是取拼接边缘线上所有像素点的像素值中的最小值。
[0015]
通过对场景序列中各个过渡模型进行边缘过渡,可以极大的减少各个元宇宙的场景的接缝位置差异过大的问题,提高用户沉浸式体验感,通过像素级别的范围性微调,边缘过渡能够稳定的消除用户在元宇宙的虚拟场景中靠近接缝位置时突然的曝光与色彩突变现象;但是,如果在待过渡区域trend(k)中接缝位置产生曝光与色彩突变的范围过大,则有可能依然在用户在元宇宙的虚拟场景中靠近接缝位置时产生较小范围的曝光与色彩突变,为了消除该问题,本发明对各个过渡模型的待过渡区域进行边缘过渡提出了以下优先的方案:优选地,或者,对各个过渡模型的待过渡区域进行边缘过渡的方法具体为:依次筛选第k-1个过渡模型的待过渡区域trend(k-1)、第k+1个过渡模型的待过渡区域trend(k+1);记cyc1(p)为待过渡区域中的第p个像素点,p为待过渡区域中的像素点序号,在p范围内遍历所有cyc1(p)进行边缘过渡,具体为:计算像素点cyc1(p)和max_lk的距离小于像素点cyc1(p)和max_rk的距离,则标记max_lk为参照修复线lr,否则标记max_rk为参照修复线lr;计算参照修复线lr上各个像素点的最大灰度值与trend(k-1)中各像素点的最大灰度值之间的差值的绝对值c(p),计算参照修复线lr上各个像素点的最大灰度值与trend(k+1)中各像素点的最大灰度值之间的差值的绝对值d(p);如果c(p)>d(p),则将像素点cyc1(p)的像素值减少|meanp(l(k(i)))-meanl(trend(k+1))|,否则将像素点cyc1(p)的像素值增加|meanp(l(k(i)))-meanl(trend(k-1))|;其中,meanp函数是取拼接边缘线上所有像素点的像素值的均值;meanl函数是取待过渡区域所有像素点的像素值的均值。其中,以上像素值也可以替换为灰度值。
[0016]
有益效果为:通过待过渡区域能够智能的筛选出在当前的场景序列中虚拟场景中靠近接缝位置时突然的曝光与色彩突变现象的显著性区域,使得待过渡区域和虚拟场景中异常接缝区域具有极强的关联性,减少了由于待过渡区域中接缝位置产生曝光与色彩突变的范围过大的较小范围的曝光与色彩突变的问题,同时也能极大的减少由于部分三维场景丢失导致的残影现象对用户沉浸感的冲击,提高了多场景无缝切换的视觉沉浸性。
[0017]
进一步地,在s500中,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景的方法为:通过apap方法、sphp方法或pt方法中任意一种将场景序列中所有的三维模
型依次进行拼接得到虚拟世界场景。
[0018]
优选地,在s500中,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景的方法为:通过专利公开号为cn104392426b一种自适应的无标志点三维点云自动拼接方法、cn103049896b三维模型的几何数据和纹理数据自动配准算法、cn109598677a一种三维图像拼接方法、装置、设备及可读存储介质,或者cn114283250a高精度的三维点云地图自动拼接与优化方法及系统中任意一种将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0019]
本发明还提供了一种元宇宙空间中虚拟世界场景生成方法系统,所述一种元宇宙空间中虚拟世界场景生成方法系统包括:处理器、存储器及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述一种元宇宙空间中虚拟世界场景生成方法中的步骤,所述一种元宇宙空间中虚拟世界场景生成方法系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端数据中心等计算设备中,可运行的系统可包括,但不仅限于,处理器、存储器、服务器集群,所述处理器执行所述计算机程序运行在以下系统的单元中:场景模型获取单元,用于获取不同场景的三维模型作为场景模型,按照场景模型的拼接顺序将场景模型依次排列得到场景序列;边缘适配计算单元,用于依次计算场景序列中各个场景模型与相邻的场景模型之间的边缘适配度;过渡模型标记单元,用于通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型;边缘过渡处理单元,用于对场景序列中各个过渡模型进行边缘过渡;虚拟场景拼接单元,用于将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0020]
虚拟场景显示单元,用于将虚拟世界场景输出到虚拟现实头盔进行显示。
[0021]
本发明的有益效果为:本发明提供了一种元宇宙空间中虚拟世界场景生成方法及系统,通过像素亮差度计算获得的以上边缘适配度,能够很好的凸显出场景模型与相邻的场景模型之间的边缘的亮度适配程度,能够凸显在虚拟现实环境下的场景接缝处的微弱差别,可以极大的减少各个元宇宙的场景的接缝位置差异过大的问题,提高用户沉浸式体验感,通过边缘过渡能够稳定的消除用户在元宇宙的虚拟场景中靠近接缝位置时突然的曝光与色彩突变现象。
附图说明
[0022]
通过对结合附图所示出的实施方式进行详细说明,本发明的上述以及其他特征将更加明显,本发明附图中相同的参考标号表示相同或相似的元素,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,在附图中:图1所示为一种元宇宙空间中虚拟世界场景生成方法的流程图;图2所示为一种元宇宙空间中虚拟世界场景生成方法系统结构图。
具体实施方式
[0023]
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整的描述,以充分地理解本发明的目的、方案和效果。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0024]
如图1所示为一种元宇宙空间中虚拟世界场景生成方法的流程图,下面结合图1来阐述根据本发明的实施方式的一种元宇宙空间中虚拟世界场景生成方法,所述方法包括以下步骤:s100,获取不同场景的三维模型作为场景模型,按照场景模型的拼接顺序将场景模型依次排列得到场景序列;s200,依次计算场景序列中各个场景模型与相邻的场景模型之间的边缘适配度;s300,通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型;s400,对场景序列中各个过渡模型进行边缘过渡;s500,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0025]
优选地,将虚拟世界场景输出到虚拟现实头盔进行显示。
[0026]
进一步地,在s100中,不同场景的三维模型为:以三维建模或者三维扫描获取到场景的三维模型作为场景模型,或者对场景进行拍照并进行三维重建获得的三维模型作为场景模型;所述场景为预设区域的建筑物、树木、交通工具和/或地理环境。
[0027]
其中,不同场景的三维模型源自于不同的元宇宙服务器中。
[0028]
优选地,元宇宙服务器的硬件为异构服务器;元宇宙服务器的软件包括用于结构、感知、控制仿真的simulation sdks,用于渲染、实时光追、ai降噪的sdks,通过sdks的kit功能将这些不同的sdk进行模块化的组合,快速完成定制化app或者微服务的开发,用于建模和渲染的create,用于可视化的view,还包括数据库和协作引擎nucleus,建模工具互联插件connect,connect用于支持与各个连接到元宇宙服务器的客户端上安装的3ds max、ue、maya等软件互联。
[0029]
进一步地,在s100中,场景模型的拼接顺序为以首个获取到的场景模型开始,按照从所述场景模型到各个场景之间在虚拟场景互相拼接的顺序。
[0030]
优选地,在s100中,场景模型的拼接顺序为以获取场景模型的时间顺序作为场景模型的拼接顺序。
[0031]
进一步地,在s200中,计算场景模型与相邻的场景模型之间的边缘适配度的方法包括以下步骤:记场景序列中场景模型的数量为n,取i为场景序列中场景模型的序号,取i∈[2,n-1],以l(i)为第i个场景模型和第i-1个场景模型之间的拼接边缘线;以r(i)为第i个场景模型和第i+1个场景模型之间的拼接边缘线;所述拼接边缘线为两个场景模型准备合并位置的共同的边缘线(即两个场景模型准备合并位置的边缘线或者两个场景模型准备接合处位置的边缘线);在i的取值范围内,依次计算第i个场景模型与相邻的场景模型之间的边缘适配度suit(i)为:
;其中,j为变量,meang函数是取拼接边缘线上所有像素点的灰度值的均值;ln是指自然对数,mart(i,j)是场景序列中第i个场景模型和第j个场景模型之间的像素亮差度,其计算方法为:mart(i,j)=|maxg(l(i))-maxg(l(j))|-|maxg(l(i))-maxg(r(j))|;其中,maxg函数是取拼接边缘线上所有像素点的灰度值中的最大值;l(j)是第j个场景模型和第j-1个场景模型之间的拼接边缘线;r(j)是第j个场景模型和第j+1个场景模型之间的拼接边缘线。
[0032]
其有益效果为:通过像素亮差度计算获得的以上边缘适配度,能够很好的凸显出场景模型与相邻的场景模型之间的边缘的亮度适配程度,能够凸显在虚拟现实环境下的场景接缝处的微弱差别,根据当前场景模型与周边场景模型的共同的边缘线上灰度变化趋势以区分出他们之间差异特征。
[0033]
进一步地,在s300中,通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型的方法为:取所有场景模型与相邻的场景模型之间的边缘适配度的均值为suitmean;在i的取值范围内,当第i个场景模型与相邻的场景模型之间的边缘适配度suit(i)<suitmean则判断该场景模型需边缘过渡并将该场景模型记为过渡模型。
[0034]
进一步地,在s400中,对场景序列中各个过渡模型进行边缘过渡的方法为:记场景序列中各个过渡模型的数量为n2,取k为场景序列中过渡模型的序号,取k∈[2,n2-1],获取第k个过渡模型在场景序列中对应的场景模型的序号为k(i);筛选过渡模型的待过渡区域,具体方法为:以l(k(i))为第k个过渡模型和第k(i)-1个场景模型之间的拼接边缘线;以r(k(i))为第k个过渡模型和第k(i)+1个场景序列之间的拼接边缘线;分别对l(k(i))和r(k(i))进行角点检测获得角点,取l(k(i))上灰度值最大的角点为max_lk,取r(k(i))上灰度值最大的角点为max_rk;取max_lk和max_rk的中点在第k个过渡模型上投影点记为深度点pj(k),或者,取max_lk和max_rk的中点到第k个过渡模型上各像素点的距离中最短距离的点记为深度点pj(k),以max_lk、max_rk和pj(k)三个点互相连接形成的三角形的外接圆为cyc1;取cyc1范围内的第k个过渡模型的区域记为第k个过渡模型的待过渡区域trend(k);对各个过渡模型的待过渡区域进行边缘过渡,具体为:记cyc1(p)为待过渡区域中的第p个像素点,p为待过渡区域中的像素点序号,在p范围内遍历所有cyc1(p)进行边缘过渡,具体为:计算像素点cyc1(p)的灰度值和max_lk的灰度值之间的差值的绝对值a(p),计算像素点cyc1(p)的灰度值和max_rk的灰度值之间的差值的绝对值b(p),如果a(p)>b(p),则将像素点cyc1(p)的像素值减少|maxp(l(k(i)))-maxp(r(k(i)))|,否则将像素点cyc1(p)的像素值增加|minp(l(k(i)))-minp(r(k(i)))|;其中,maxp函数是取拼接边缘线上所有像素点的像素值中的最大值;minp函数是取拼接边缘线上所有像素点的像素值中的最小值。
[0035]
通过对场景序列中各个过渡模型进行边缘过渡,可以极大的减少各个元宇宙的场景的接缝位置差异过大的问题,提高用户沉浸式体验感,通过像素级别的范围性微调,边缘过渡能够稳定的消除用户在元宇宙的虚拟场景中靠近接缝位置时突然的曝光与色彩突变现象;但是,如果在待过渡区域trend(k)中接缝位置产生曝光与色彩突变的范围过大,则有
可能依然在用户在元宇宙的虚拟场景中靠近接缝位置时产生较小范围的曝光与色彩突变,为了消除该问题,本发明对各个过渡模型的待过渡区域进行边缘过渡提出了以下优先的方案:优选地,或者,对各个过渡模型的待过渡区域进行边缘过渡的方法具体为:依次筛选第k-1个过渡模型的待过渡区域trend(k-1)、第k+1个过渡模型的待过渡区域trend(k+1);记cyc1(p)为待过渡区域中的第p个像素点,p为待过渡区域中的像素点序号,在p范围内遍历所有cyc1(p)进行边缘过渡,具体为:计算像素点cyc1(p)和max_lk的距离小于像素点cyc1(p)和max_rk的距离,则标记max_lk为参照修复线lr,否则标记max_rk为参照修复线lr;计算参照修复线lr上各个像素点的最大灰度值与trend(k-1)中各像素点的最大灰度值之间的差值的绝对值c(p),计算参照修复线lr上各个像素点的最大灰度值与trend(k+1)中各像素点的最大灰度值之间的差值的绝对值d(p);如果c(p)>d(p),则将像素点cyc1(p)的像素值减少|meanp(l(k(i)))-meanl(trend(k+1))|,否则将像素点cyc1(p)的像素值增加|meanp(l(k(i)))-meanl(trend(k-1))|;其中,meanp函数是取拼接边缘线上所有像素点的像素值的均值;meanl函数是取待过渡区域所有像素点的像素值的均值。其中,以上像素值也可以替换为灰度值。
[0036]
有益效果为:通过待过渡区域能够智能的筛选出在当前的场景序列中虚拟场景中靠近接缝位置时突然的曝光与色彩突变现象的显著性区域,使得待过渡区域和虚拟场景中异常接缝区域具有极强的关联性,减少了由于待过渡区域中接缝位置产生曝光与色彩突变的范围过大的较小范围的曝光与色彩突变的问题,同时也能极大的减少由于部分三维场景丢失导致的残影现象对用户沉浸感的冲击,提高了多场景无缝切换的视觉沉浸性。
[0037]
进一步地,在s500中,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景的方法为:通过apap方法、sphp方法或pt方法中任意一种将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0038]
优选地,在s500中,将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景的方法为:通过专利公开号为cn104392426b一种自适应的无标志点三维点云自动拼接方法、cn103049896b三维模型的几何数据和纹理数据自动配准算法、cn109598677a一种三维图像拼接方法、装置、设备及可读存储介质,或者cn114283250a高精度的三维点云地图自动拼接与优化方法及系统中任意一种将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0039]
本发明的实施例提供的一种元宇宙空间中虚拟世界场景生成方法系统,如图2所示为本发明的一种元宇宙空间中虚拟世界场景生成方法系统结构图,该实施例的一种元宇宙空间中虚拟世界场景生成方法系统包括:处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述一种元宇宙空间中虚拟世界场景生成方法系统实施例中的步骤。
[0040]
所述系统包括:存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序运行在以下系统的单元中:场景模型获取单元,用于获取不同场景的三维模型作为场景模型,按照场景模型的拼接顺序将场景模型依次排列得到场景序列;
边缘适配计算单元,用于依次计算场景序列中各个场景模型与相邻的场景模型之间的边缘适配度;过渡模型标记单元,用于通过边缘适配度标记出各个场景模型中需边缘过渡的场景模型记为过渡模型;边缘过渡处理单元,用于对场景序列中各个过渡模型进行边缘过渡;虚拟场景拼接单元,用于将场景序列中所有的三维模型依次进行拼接得到虚拟世界场景。
[0041]
虚拟场景显示单元,用于将虚拟世界场景输出到虚拟现实头盔进行显示。
[0042]
所述一种元宇宙空间中虚拟世界场景生成方法系统可以运行于桌上型计算机、笔记本电脑、掌上电脑及云端服务器等计算设备中。所述一种元宇宙空间中虚拟世界场景生成方法系统,可运行的系统可包括,但不仅限于,处理器、存储器。本领域技术人员可以理解,所述例子仅仅是一种元宇宙空间中虚拟世界场景生成方法系统的示例,并不构成对一种元宇宙空间中虚拟世界场景生成方法系统的限定,可以包括比例子更多或更少的部件,或者组合某些部件,或者不同的部件,例如所述一种元宇宙空间中虚拟世界场景生成方法系统还可以包括输入输出设备、网络接入设备、总线等。
[0043]
所称处理器可以是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器 (digital signal processor,dsp)、专用集成电路 (application specific integrated circuit,asic)、现场可编程门阵列 (field-programmable gate array,fpga) 或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等,所述处理器是所述一种元宇宙空间中虚拟世界场景生成方法系统运行系统的控制中心,利用各种接口和线路连接整个一种元宇宙空间中虚拟世界场景生成方法系统可运行系统的各个部分。
[0044]
所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现所述一种元宇宙空间中虚拟世界场景生成方法系统的各种功能。所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、电话本等)等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(smart media card, smc),安全数字(secure digital, sd)卡,闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
[0045]
尽管本发明的描述已经相当详尽且特别对几个所述实施例进行了描述,但其并非旨在局限于任何这些细节或实施例或任何特殊实施例,从而有效地涵盖本发明的预定范围。此外,上文以发明人可预见的实施例对本发明进行描述,其目的是为了提供有用的描述,而那些目前尚未预见的对本发明的非实质性改动仍可代表本发明的等效改动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1