多波束测深边缘数据改正方法、装置和计算机设备与流程
本技术涉及深度测量,特别是涉及一种多波束测深边缘数据改正方法、装置和计算机设备。
背景技术:
1、多波束测深系统作为当代海洋勘测中不可或缺的技术产品,多波束测深系统将传统的测深技术从点线扩展到了面,同时还具有速度快、范围大、高精度与高效率的优势。但在实际测深中,由于多波束测深系统是将多个换能器基元组成基阵,在一条测深数据的条带中,误差通常会体现为较为一致或者是具有一定趋向性的特点,且这种系统误差受入射角与深度的影响最为显著,由于多波束测深系统边缘波束的入射角较大,受到的影响尤为严重,导致多波束系统边缘部分精度较差问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高多波束系统边缘数据精度的多波束测深边缘数据改正方法、装置和计算机设备。
2、第一方面,本技术提供了一种多波束测深边缘数据改正方法,所述方法包括:
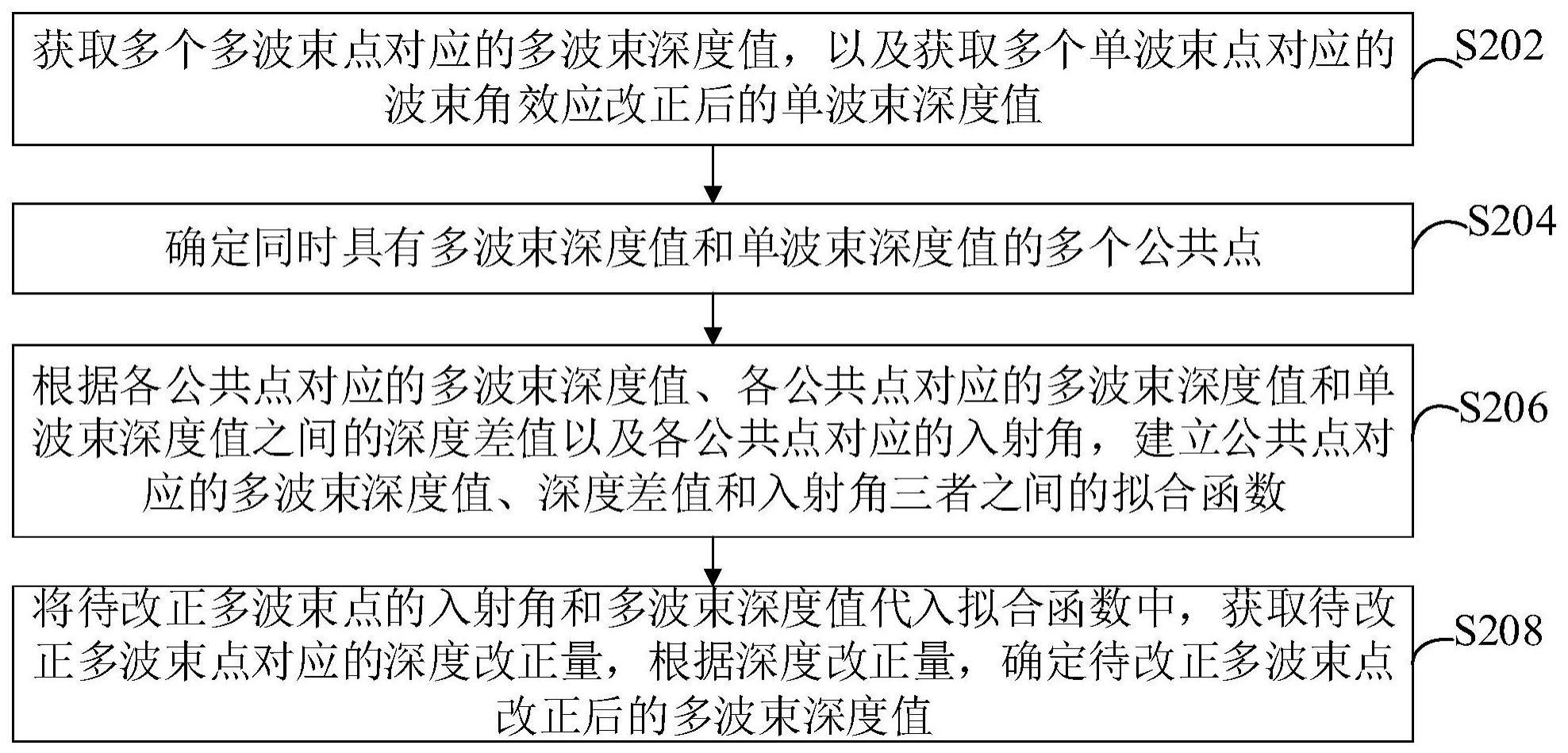
3、获取多个多波束点对应的多波束深度值,以及获取多个单波束点对应的波束角效应改正后的单波束深度值;
4、确定同时具有多波束深度值和单波束深度值的多个公共点;
5、根据各公共点对应的多波束深度值、各公共点对应的多波束深度值和单波束深度值之间的深度差值以及各公共点对应的入射角,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数;
6、将待改正多波束点的入射角和多波束深度值代入拟合函数中,获取待改正多波束点对应的深度改正量,根据深度改正量,确定待改正多波束点改正后的多波束深度值。
7、在其中一个实施例中,获取多个单波束点对应的波束角效应改正后的单波束深度值,包括:
8、根据至少两个单波束点对应的单波束深度值,确定地形倾角;
9、根据地形倾角和当前单波束点对应的半波束开角,确定当前单波束点对应的平面位置改正量以及波束角效应改正后的单波束深度值;平面位置改正量为当前单波束点在测线上的偏移量;
10、若当前单波束点对应的平面位置改正量和/或深度改正量超过预设值,则返回执行根据至少两个单波束点对应的单波束深度值,确定地形倾角的步骤,直至平面位置改正量和深度改正量均小于预设值,并输出当前单波束点对应的波束角效应改正后的单波束深度值;深度改正量为当前单波束点对应的深度测量值的偏移量。
11、在其中一个实施例中,根据地形倾角和当前单波束点对应的半波束开角,确定当前单波束点对应的平面位置改正量以及波束角效应改正后的单波束深度值,包括:
12、若单波束的半波束开角小于倾斜角,则将当前单波束点对应的实际深度值与半波束开角的正弦值的乘积确定为当前单波束点对应的平面位置改正量;
13、将位于当前单波束点之前且距离当前单波束点的距离等于平面位置改正量的位置对应的深度测量值,作为当前单波束点的改正后深度测量值。
14、在其中一个实施例中,根据地形倾角和当前单波束点对应的半波束开角,确定当前单波束点对应的平面位置改正量以及波束角效应改正后的单波束深度值,包括:
15、若单波束的半波束开角大于倾斜角,则将当前单波束点对应的实际深度值与倾斜角的正弦值的乘积确定为当前单波束点对应的平面位置改正量;
16、将位于当前单波束点之前,且距离当前单波束点的距离等于平面改正量的位置对应的深度测量值,作为单波束点对应的波束角效应改正后的单波束深度值。
17、在其中一个实施例中,确定同时具有多波束深度值和单波束深度值的多个公共点,包括:在以多半波束点为圆心,以预设半径的区域内搜索单波束点,取距离多波束点距离最近的单波束点作为公共点。
18、在其中一个实施例中,公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数为二次多项式。
19、第二方面,本技术还提供了一种多波束测深边缘数据改正装置。所述装置包括:
20、获取模块,用于获取多个多波束点对应的多波束深度值,以及获取多个单波束点对应的波束角效应改正后的单波束深度值;
21、公共点搜索模块,用于确定同时具有多波束深度值和单波束深度值的多个公共点;
22、拟合模块,用于根据各公共点对应的多波束深度值、各公共点对应的多波束深度值和单波束深度值之间的深度差值以及各公共点对应的入射角,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数;
23、改正模块,用于将待改正多波束点的入射角和多波束深度值代入拟合函数中,获取待改正多波束点对应的深度改正量,根据深度改正量,确定待改正多波束点改正后的多波束深度值。
24、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
25、获取多个多波束点对应的多波束深度值,以及获取多个单波束点对应的波束角效应改正后的单波束深度值;
26、确定同时具有多波束深度值和单波束深度值的多个公共点;
27、根据各公共点对应的多波束深度值、各公共点对应的多波束深度值和单波束深度值之间的深度差值以及各公共点对应的入射角,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数;
28、将待改正多波束点的入射角和多波束深度值代入拟合函数中,获取待改正多波束点对应的深度改正量,根据深度改正量,确定待改正多波束点改正后的多波束深度值。
29、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
30、获取多个多波束点对应的多波束深度值,以及获取多个单波束点对应的波束角效应改正后的单波束深度值;
31、确定同时具有多波束深度值和单波束深度值的多个公共点;
32、根据各公共点对应的多波束深度值、各公共点对应的多波束深度值和单波束深度值之间的深度差值以及各公共点对应的入射角,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数;
33、将待改正多波束点的入射角和多波束深度值代入拟合函数中,获取待改正多波束点对应的深度改正量,根据深度改正量,确定待改正多波束点改正后的多波束深度值。
34、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
35、获取多个多波束点对应的多波束深度值,以及获取多个单波束点对应的波束角效应改正后的单波束深度值;
36、确定同时具有多波束深度值和单波束深度值的多个公共点;
37、根据各公共点对应的多波束深度值、各公共点对应的多波束深度值和单波束深度值之间的深度差值以及各公共点对应的入射角,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数;
38、将待改正多波束点的入射角和多波束深度值代入拟合函数中,获取待改正多波束点对应的深度改正量,根据深度改正量,确定待改正多波束点改正后的多波束深度值。
39、上述多波束测深边缘数据改正方法、装置和计算机设备,一方面利用单波束点的单波束深度值为控制点,搜索同时具有多波束深度值和单波束深度值的多个公共点,根据函数拟合的手段,建立公共点对应的多波束深度值、深度差值和入射角三者之间的拟合函数,以多方面参数为参考,可以获得更加精确的多波束单波束点对应的深度改正量,提高多波束点的边缘数据的精度;根据拟合函数对待改正多波束点的边缘部分的多波束深边缘数据进行改正,提高边缘部分的数据质量,另一方面,采用经过波束角效应改正后的单波束点为控制点,可以提高多波束边缘数据的改正精度。
- 还没有人留言评论。精彩留言会获得点赞!