基于多层前馈神经网络加权提高全球平均测高精度方法与流程
本发明涉及卫星测高学、海洋测绘学等交叉,特别是基于多层前馈神经网络加权提高全球平均测高精度方法。
背景技术:
1、海面测高不仅在自然环境、生态经济等领域具有重要作用,还是获取海洋动力学环境参数和海洋重力场信息的最直接手段之一,其对于建立水下惯性/重力组合导航系统中的高精度全球重力场模型具有至关重要意义。目前现有的常规海面测高手段主要包括验潮站测高和卫星雷达测高,但验潮站测高无法满足全球尺度下的测高精度需求,且这两种手段成本较高,时空分辨率较低。
2、近些年来,随着全球gnss系统建设的逐渐完善,自1993年martin-neira提出被动反射和干涉系统(paris)概念后,利用gnss-r技术进行海洋遥感及海面高度测量成为一种新型研究理念。目前利用gnss-r技术进行海面测高方法主要包括:码相位测高、载波相位测高以及信噪比测高,目前主要利用岸基和空基平台进行实验。码相位测高模型简单易于实现,因此应用较为广泛;载波相位测高要求信号相干,但在卫星高度角较大情况下,海面反射信号通常是非相干散射信号;信噪比测高采用常用的单天线信号接收机,使用范围广,有效降低了成本,反演精度通常为分米级。在岸基观测方面,1995年,anderson等首次提出gps卫星信号干涉测量结果,并与验潮站结果进行对比,发现其测量精度约为12cm;johan等提出基于gnss信号的验潮仪,采用载波相位法,反演精度可达4cm。在空基观测方面,ruffini等利用低海拔机载平台采集了风速为10m/s,有效波高为2m的旋涡海况下的gps反射信号,并对试验数据进行了码相位跟踪处理,反演的海面高度精度达到分米级,空间分辨率为20km;carreno-luengo等通过机载试验论证,相比gps c/a码,基于半无码技术的gps p(y)码海面测高技术将测高精度提高1.4~2.4倍。
3、
4、对gnss-r星座的海面测高研究目前主要聚焦在cygnss星座。cygns s星座由8颗低轨卫星组成,轨道高度为500km,轨道倾角为35°,平均寻访时间预测可达6h,可以全天候、无间隙地覆盖全球海洋南北纬度35°之间的地区。2019年,李伟强等利用cygnss数据,生成gpsl1、galileo e1和北斗3b1波段信号的反射波形,通过应用延迟修正模型进行海面高度反演,将双基延迟观测值转换为海面高度测量值,并与平均海面高度模型进行比较;2020年,jake等利用cygnss的ddm数据对印度尼西亚附近海域进行海面高度反演,并提出未来gnss-r测高任务的优先设计因素;alex等对cygnss卫星轨道进行跟踪观测处理,利用改进轨道结合电离层延迟模型和对流层延迟模型等降低相对于dtu10平均海面的海面高度异常值。这些结果都为未来致力于海洋测高应用的gnss-r任务的发展提供有效支撑。
5、目前基于星载平台的gnss-r海面测高模式主要局限于以下几个方面:①单颗星无法实现特定范围的不间断探测;②利用多颗卫星组成星座可以提升gn ss-r全球平均海面测高精度,但目前缺少现有的模拟研究成果,无法对该模式下的海面测高精度进行具体评估。考虑到上述问题,基于卫星星座的星载gnss-r测高平台可以发挥以下观测优势:①实现特定区域内全天时全天候不间断连续探测。相较于单颗星而言,利用星座进行卫星之间的共同协作有助于实现全球或一定区域的观测与数据收集,满足水下导航等任务所需的5-8cm的海面测高精度和空间分辨率。②具有大量信号源。在轨或计划中的导航卫星提供了丰富的免费公开信号,这有利于实现大范围的高空间分辨率、短回访周期的数据采集和地表参数反演。③降雨、大雾等恶劣天气对l波段信号的影响较小,有利于实现长时间连续全天候的观测。④采用异源观测模式,无需发射机,因此观测装置的体积、成本、质量等复杂度均降低。
6、由此可见,高精度的gnss-r测高星座组网是未来gnss-r测高的必然趋势,而建立基于卫星星座的全球平均海面测高精度预测模型则可以填补该模式下的研究空白,具体评估其海面测高能力。随着机器学习的飞速发展,人工神经网络技术再次受到人们的重视。该技术具有较高的非线性映射能力,因此将全球平均海面测高精度预测模型与人工神经网络相结合,必然可以提高预测模型的准确性和实用性。
7、不同于前人已有研究成果,本发明提出全球平均海面测高精度指标,以构建合理观测星座构型并提升gnss-r全球平均海面测高精度为目标,揭示星座构型参数对于全球平均海面测高精度的影响机理;通过联合多层前馈神经网络及adam优化算法,构建新型多层前馈神经网络加权联合预测模型,提出优化的星座构型方案,从而满足水下导航所需的测高精度需求。
技术实现思路
1、本发明目的是:基于多层前馈神经网络加权提高全球平均测高精度方法。解决了不同仿真条件下基于卫星星座的星载gnss-r测高能力无法快速评估的问题,提高了全球平均海面测高精度的计算效率,并给出了当前在满足水下导航测高精度的需求下最佳的星座仿真参数。
2、本发明的技术解决方案是:
3、基于多层前馈神经网络加权提高全球平均测高精度方法,包括:
4、对地球海面进行网格划分,获得每个网格的平均测高精度σgrid;
5、根据每个网格的平均测高精度σgrid,获得所有网格平均测高精度σgrid的平均值
6、根据所有网格平均测高精度σgrid的平均值确定星载gnss-r全球平均海面测高精度σglobal;
7、建立全球平均海面测高精度预测模型;
8、对全球平均海面测高精度预测模型进行可行性验证,获得满足验证条件的全球平均海面测高精度预测模型;
9、利用满足验证条件的全球平均海面测高精度预测模型,在不同仿真范围下进行仿真计算,获取多个全球平均海面测高精度预测结果;
10、对获得的多个全球平均海面测高精度预测结果,进行筛选,筛选出满足水下导航海面测高精度取值范围的预测结果,作为筛选结果;
11、筛选结果对应的轨道高度、轨道倾角、卫星个数以及仿真周期,作为星座设计方案,利用获得的星座设计方案进行gnss-r测高星座的设计与发射,最终获得全球平均海面测高精度的实测值。
12、优选地,获得每个网格的平均测高精度σgrid的方法,具体为:
13、
14、其中,表示网格中所有单镜面反射点海面高度测量均方差σssh的平均值,n为划分的每个网格中所包含的单镜面反射点的个数。
15、优选地,
16、
17、其中,σssh为每一网格中单镜面反射点海面高度测量均方差,pz(0)和pz(0)′为每一网格中单镜面反射点处平均功率的幅值和功率波形的斜率,c为真空中的光速,snr为信号相关功率,nincoh为非相干累加次数,εele为单镜面反射点高度角。
18、优选地,
19、优选地,全球平均海面测高精度预测模型具体为:
20、y=-0.4018×tansig(-0.0463x1-1.6060x2-1.1038x3+1.1773x4+2.2772)+0.9281×tansig(1.4336x1-0.0311x2-1.3815x3+1.1050x4-1.5181)-0.1666×tansig(-0.5657x1-1.0521x2+1.4176x3-1.3226x4+0.7591)+0.8444×tansig(0.8738x1-1.8850x2-0.3772x3+0.8525x4)+0.2531×tansig(-1.5508x1+1.0884x2-0.1054x3-1.2590x4-0.7591)+0.4047×tansig(-0.0039x1-1.3172x2-1.8088x3-0.4230x4-1.5181)+0.1091×tansig(-1.4974x1+0.9534x2-0.4286x3-1.3605x4-2.2772)-0.2366
21、其中,y等于σglobal,x1为轨道高度,x2为轨道倾角,x3为卫星个数,x4为仿真周期。
22、优选地,验证条件为整体性评价指标、平均绝对误差、平均绝对百分比误差或均方根误差中的任意一个。
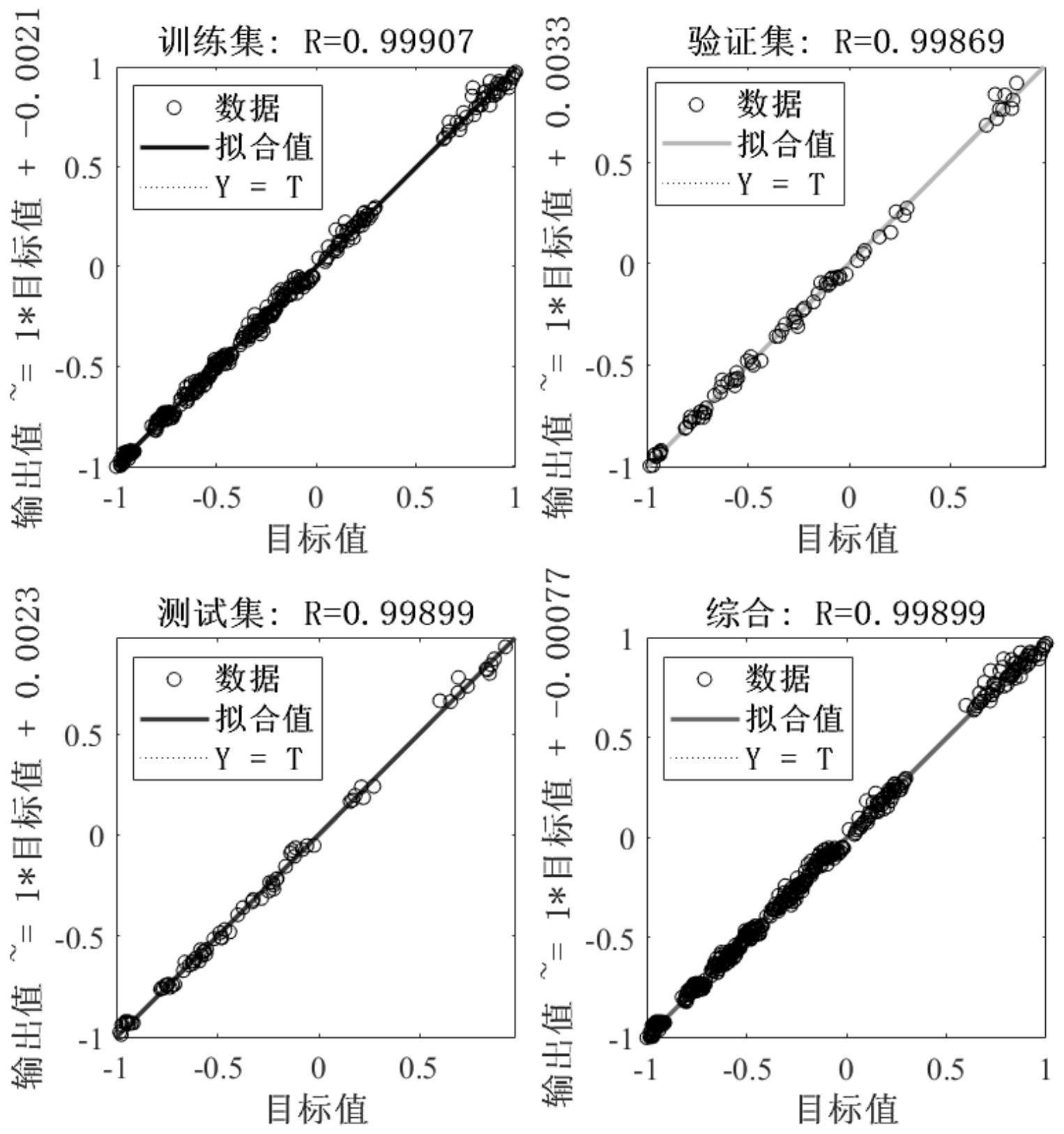
23、优选地,验证条件为使用整体性评价指标,对全球平均海面测高精度预测模型进行验证的方法,具体为:
24、
25、其中,为第i个样本对应的星载gnss-r全球平均海面测高精度σglobal;yi(i=1,2,…,k)为第i个样本对应的全球平均海面测高精度的真实数据;k为样本数量;
26、当r2值大于0.99时,获得满足验证条件的全球平均海面测高精度预测模型。
27、优选地,不同仿真范围下以特定的仿真步长对轨道高度、轨道倾角、卫星个数以及仿真周期进行仿真计算,从而获得获取多个全球平均海面测高精度预测结果;
28、其中,轨道高度的仿真范围为300km-800km,步长为1km;轨道倾角的仿真范围为70°-97.5°,步长为0.5°;卫星个数的仿真范围为1-8颗,步长为1颗;仿真周期的取值范围为1-3年,步长为1年。
29、优选地,水下导航海面测高精度取值范围要求全球平均海面测高精度预测结果的取值范围为5-8cm。
30、本发明与现有技术相比的优点在于:
31、本发明采用了多层前馈神经网络联合adam算法建立预测模型,对星载gnss-r测高能力进行定量预估,从而可以大大缩减该测高模式下的仿真时间,并迅速给出满足水下导航测高精度需求的具体星座构型参数及仿真周期。
- 还没有人留言评论。精彩留言会获得点赞!