一种快速计算旋翼刚体挥舞稳态周期响应的方法及系统
本发明涉及旋翼挥舞响应计算,特别是涉及一种快速计算旋翼刚体挥舞稳态周期响应的方法及系统。
背景技术:
1、对于常规直升机、共轴双旋翼直升机、自转旋翼机、倾转旋翼机等旋翼飞行器,其旋翼存在周期性的挥舞响应。在前飞等旋翼气动力不平衡的状态下,气动力大的一侧旋翼将受迫向上挥舞从而使迎角减小,气动力也随之减小,气动力小的一侧旋翼将受迫向下挥舞从而增大迎角,气动力也随之增大,旋翼的挥舞响应可大幅减少旋翼飞行器的倾翻力矩,对其稳定性和操纵性作用明显,同时旋翼的挥舞响应特性也对旋翼飞行器的气动特性与性能、动力学特性以及飞行性能等有重要影响,因此,在设计与应用阶段如何快速、准确地计算和评估旋翼的挥舞响应特性是开展气动、动力学、飞行力学等特性分析的前提。旋翼挥舞响应计算属于流固耦合仿真领域,流体和结构双向耦合的特性导致旋翼挥舞响应计算方法复杂、计算量极大且收敛慢,如何提高计算效率、减小计算时长一直是旋翼挥舞响应计算的热点和难点问题,然而现有的快速计算方法不能全面的考虑除旋翼外的其他气动部件对流场的影响。
技术实现思路
1、本发明的目的是提供一种快速计算旋翼刚体挥舞稳态周期响应的方法及系统,将旋翼动量源项和旋翼刚体挥舞响应松耦合以快速计算旋翼稳态刚体挥舞响应,在全面考虑气动部件对流场影响的前提下有效提高了计算效率。
2、为实现上述目的,本发明提供了如下方案:
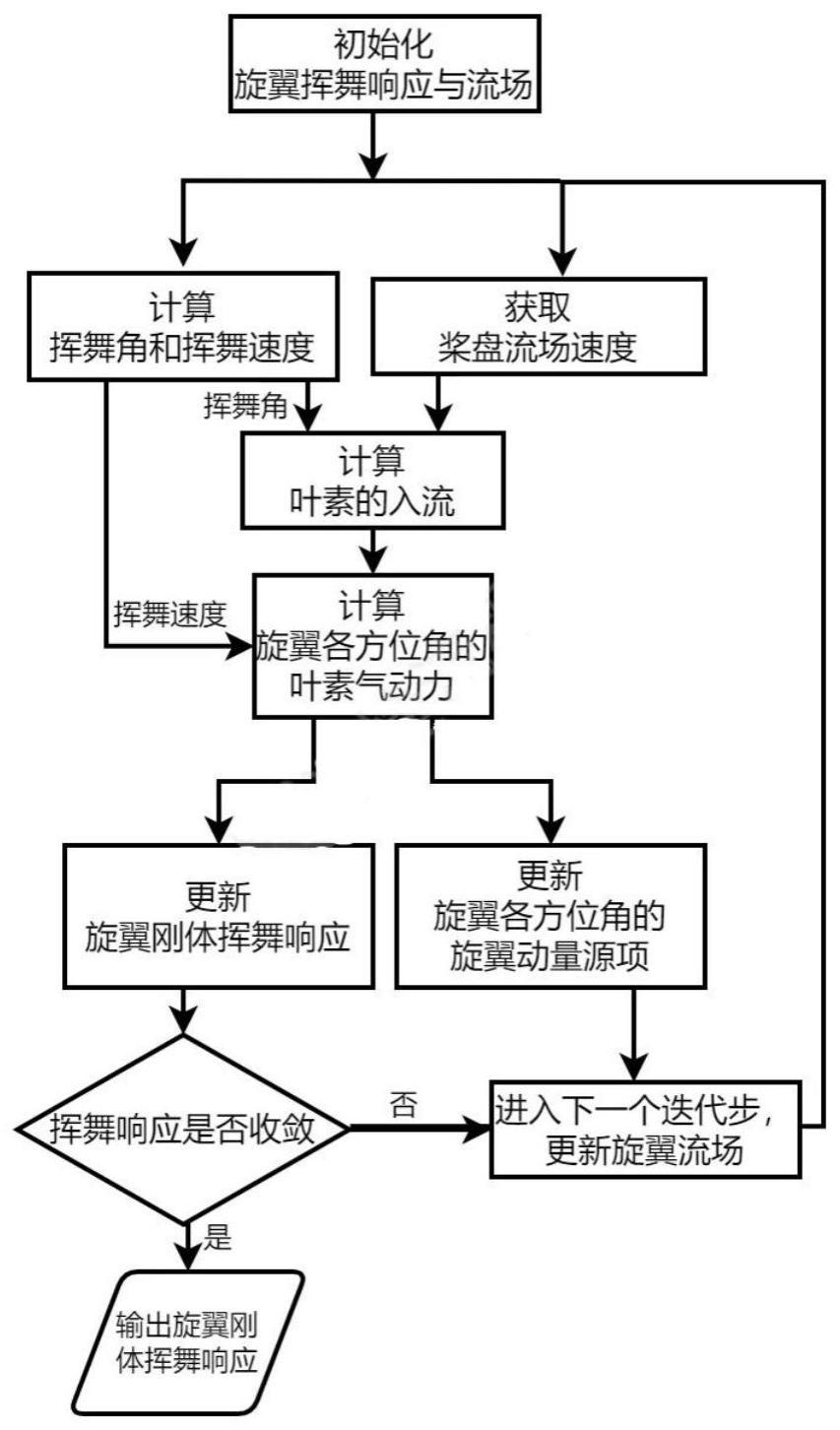
3、一种快速计算旋翼刚体挥舞稳态周期响应的方法,所述方法包括:
4、获取包含旋翼的一个任意空间作为旋翼cfd流场计算域;
5、对所述旋翼cfd流场计算域进行网格划分,得到旋翼区域网格;
6、在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn;
7、在桨毂坐标系下利用旋翼的尖端挥舞速度vn计算旋翼的各叶素微段的挥舞速度vflapn;所述叶素微段为旋翼沿展向的一截;
8、利用惯性坐标系下所述旋翼区域网格处的x方向流场速度vgxn、y方向流场速度vgyn和z方向流场速度vgzn获取桨毂坐标系下旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn、第一径向流场速度vrplaneofdiskn和第一切向流场速度vtplaneofdiskn;所述x方向流场速度、y方向流场速度和z方向流场速度分别为惯性坐标系的x方向的流场速度、y方向的流场速度和z方向的流场速度;所述第一法向流场速度、第一径向流场速度和第一切向流场速度分别为桨毂坐标系的法向方向的流场速度、径向方向的流场速度和切向方向的流场速度;
9、利用桨毂坐标系下的所述旋翼刚体挥舞角βflapn、所述旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn和第一径向流场速度vrplaneofdiskn,计算叶素微段坐标系下旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen和第二切向流场速度vtbladen;所述第二法向流场速度和第二切向流场速度分别为叶素微段坐标系的法向方向的流场速度和切向方向的流场速度;
10、在叶素微段坐标系下利用旋翼的各叶素微段的挥舞速度vflapn和旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen计算流场相对于叶素微段的法向速度vnbladebladen;
11、获取旋翼总距操纵输入φ0、旋翼纵向周期变距操纵输入a以及旋翼横向周期变距操纵输入b,并计算旋翼桨距角;
12、在叶素微段坐标系下,利用旋翼的各叶素微段位于各方位角处的第二切向流场速度vtbladen、流场相对于叶素微段的法向速度vnbladebladen和所述旋翼桨距角,根据叶素理论计算旋翼的各叶素微段位于各方位角处的气动力fareon;
13、利用所述气动力fareon计算旋翼位于各方位角处的旋翼动量源项fsourcen;
14、将所述旋翼动量源项fsourcen添加至纳维-斯托克斯方程的动量源项中,并根据所述纳维-斯托克斯方程利用计算流体力学的方法更新所述旋翼区域网格处在惯性坐标系下的x方向流场速度、y方向流场速度和z方向流场速度;
15、利用所述气动力fareon以松耦合的方式更新旋翼刚体挥舞响应的尖端挥舞加速度尖端挥舞速度和尖端挥舞位移并返回步骤“在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn”;
16、直到相邻两次迭代的尖端挥舞位移的差值小于预设误差值,停止迭代。
17、本发明还提供了一种快速计算旋翼刚体挥舞稳态周期响应的系统,所述系统包括:
18、计算域选取单元,用于获取包含旋翼的一个任意空间作为旋翼cfd流场计算域;
19、网格划分单元,用于对所述旋翼cfd流场计算域进行网格划分,得到旋翼区域网格;
20、刚体挥舞角计算单元,用于在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn;
21、挥舞速度计算单元,用于在桨毂坐标系下利用旋翼的尖端挥舞速度vn计算旋翼的各叶素微段的挥舞速度vflapn;所述叶素微段为旋翼沿展向的一截;
22、流场速度获取单元,用于利用惯性坐标系下所述旋翼区域网格处的x方向流场速度vgxn、y方向流场速度vgyn和z方向流场速度vgzn获取桨毂坐标系下旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn、第一径向流场速度vrplaneofdiskn和第一切向流场速度vtplaneofdiskn;所述x方向流场速度、y方向流场速度和z方向流场速度分别为惯性坐标系的x方向的流场速度、y方向的流场速度和z方向的流场速度;所述第一法向流场速度、第一径向流场速度和第一切向流场速度分别为桨毂坐标系的法向方向的流场速度、径向方向的流场速度和切向方向的流场速度;
23、坐标转换单元,用于利用桨毂坐标系下的所述旋翼刚体挥舞角βflapn、所述旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn和第一径向流场速度vrplaneofdiskn,计算叶素微段坐标系下旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen和第二切向流场速度vtbladen;所述第二法向流场速度和第二切向流场速度分别为叶素微段坐标系的法向方向的流场速度和切向方向的流场速度;
24、相对法向速度计算单元,用于在叶素微段坐标系下利用旋翼的各叶素微段的挥舞速度vflapn和旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen计算流场相对于叶素微段的法向速度vnbladebladen;
25、输入获取单元,用于获取旋翼总距操纵输入φ0、旋翼纵向周期变距操纵输入a以及旋翼横向周期变距操纵输入b,并计算旋翼桨距角;
26、气动力计算单元,用于在叶素微段坐标系下,利用旋翼的各叶素微段位于各方位角处的第二切向流场速度vtbladen、流场相对于叶素微段的法向速度vnbladebladen和所述旋翼桨距角,根据叶素理论计算旋翼的各叶素微段位于各方位角处的气动力fareon;
27、旋翼动量源项计算单元,用于利用所述气动力fareon计算旋翼位于各方位角处的旋翼动量源项fsourcen;
28、旋翼cfd流场计算域更新单元,用于将所述旋翼动量源项fsourcen添加至纳维-斯托克斯方程的动量源项中,并根据所述纳维-斯托克斯方程利用计算流体力学的方法更新所述旋翼区域网格处在惯性坐标系下的x方向流场速度、y方向流场速度和z方向流场速度;
29、刚体挥舞响应更新单元,用于利用所述气动力fareon以松耦合的方式更新旋翼刚体挥舞响应的尖端挥舞加速度尖端挥舞速度和尖端挥舞位移并返回步骤“在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn”;
30、迭代控制单元,用于直到相邻两次迭代的尖端挥舞位移的差值小于预设误差值,停止迭代。
31、根据本发明提供的具体实施例,本发明公开了以下技术效果:
32、本发明提出了一种快速计算旋翼刚体挥舞稳态周期响应的方法及系统,首先,获取包含旋翼的一个任意空间作为旋翼cfd流场计算域;对所述旋翼cfd流场计算域进行网格划分,得到旋翼区域网格;在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn;在桨毂坐标系下利用旋翼的尖端挥舞速度vn计算旋翼的各叶素微段的挥舞速度vflapn;所述叶素微段为旋翼沿展向的一截;然后,利用惯性坐标系下所述旋翼区域网格处的x方向流场速度vgxn、y方向流场速度vgyn和z方向流场速度vgzn获取桨毂坐标系下旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn、第一径向流场速度vrplaneofdiskn和第一切向流场速度vtplaneofdiskn;利用桨毂坐标系下的所述旋翼刚体挥舞角βflapn、所述旋翼的各叶素微段位于各方位角处的第一法向流场速度vnplaneofdiskn和第一径向流场速度vrplaneofdiskn,计算叶素微段坐标系下旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen和第二切向流场速度vtbladen;在叶素微段坐标系下利用旋翼的各叶素微段的挥舞速度vflapn和旋翼的各叶素微段位于各方位角处的第二法向流场速度vnbladen计算流场相对于叶素微段的法向速度vnbladebladen;获取旋翼总距操纵输入φ0、旋翼纵向周期变距操纵输入a以及旋翼横向周期变距操纵输入b,并计算旋翼桨距角;在叶素微段坐标系下,利用旋翼的各叶素微段位于各方位角处的第二切向流场速度vtbladen、流场相对于叶素微段的法向速度vnbladebladen和所述旋翼桨距角,根据叶素理论计算旋翼的各叶素微段位于各方位角处的气动力fareon;利用所述气动力fareon计算旋翼位于各方位角处的旋翼动量源项fsourcen;将所述旋翼动量源项fsourcen添加至纳维-斯托克斯方程的动量源项中,并根据所述纳维-斯托克斯方程利用计算流体力学的方法更新所述旋翼区域网格处在惯性坐标系下的法向流场速度、径向流场速度和切向流场速度;最后,利用所述气动力fareon以松耦合的方式更新旋翼刚体挥舞响应的尖端挥舞加速度尖端挥舞速度和尖端挥舞位移并返回步骤“在桨毂坐标系下利用旋翼位于各方位角处的刚体尖端挥舞位移xn计算旋翼位于各方位角处的刚体挥舞角βflapn”;直到相邻两次迭代的尖端挥舞位移的差值小于预设误差值,停止迭代。本发明通过获取旋翼总距操纵输入、旋翼纵向周期变距操纵输入以及旋翼横向周期变距操纵输入,计算旋翼针对这三个输入的刚体挥舞稳态周期响应。由于本发明将旋翼动量源项和旋翼刚体挥舞响应松耦合,所以本发明能够快速计算旋翼稳态刚体挥舞响应,另外,使用本发明中的旋翼动量源方法时可用物面网格包含其他各个气动部件,所以其全面考虑了气动部件对流场的影响,因此,本发明在全面考虑气动部件对流场影响的前提下有效提高了计算效率。
- 还没有人留言评论。精彩留言会获得点赞!