一种基于分式函数的有源消声系统变步长LMS算法的制作方法
本发明属于噪声控制领域,尤其是一种基于分式函数的有源消声系统变步长lms算法。
背景技术:
1、lms算法因为具有结构简单、运算量小、容易实现等优点而被广泛应用在通信技术、系统识别、光谱分析、信号检测、噪音消除、波束成型、振动控制等领域。然而lms算法的步长因子是固定值,需要人工设定步长因子的大小,这就导致lms算法在快速收敛和低稳定误差两方面不可兼得。
技术实现思路
1、本发明的目的在于克服现有技术的不足之处,提供一种基于分式函数的有源消声系统变步长lms算法,解决了lms算法决收敛速率和稳定误差两者间的冲突,具有更好的收敛性、稳定性。
2、本发明解决技术问题所采用的技术方案是:
3、一种基于分式函数的有源消声系统变步长lms算法,在初始阶段选择大步长因子,进入收敛阶段后,选择小步长因子,采用非线性函数适应步长因子变化规则,其函数表达式如下:
4、
5、其中,x为误差信号,y为变步长因子。
6、进一步地,加入α、β、a三个参数调整函数,其中α控制函数底部形状,β控制函数的极值,a控制函数的开口大小,得到调整后的函数表达式如下:
7、
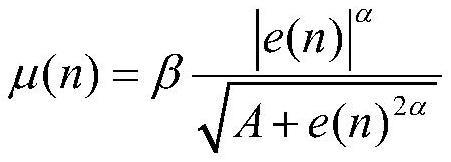
8、进一步地,用e(n)和μ(n)分别来代替x和y,得到如下函数:
9、
10、e(n)为误差信号,μ(n)为变步长因子。
11、进一步地,所述变步长lms算法的表达式为:
12、y(n)=w(n)xt(n)
13、e(n)=d(n)-y(n)
14、
15、w(n+1)=w(n)+μ(n)e(n)x(n)
16、其中,x(n)为接受信号,y(n)为输入线性加权之和,w(n)为滤波器权向量,d(n)为期望信号;
17、算法收敛的条件为0<μ<1/λmax,e(n)的值是不确定的,为了满足收敛条件,e(n)无论取任何值μ(n)都应在范围(0,1/λmax)之内,对上式进行求极限,只要求得极限值在(0,1/λmax)范围之内,就能满足算法收敛。
18、进一步地,用仿真软件进行仿真,确定函数中α、β、a的值。
19、本发明的优点和积极效果是:
20、1.本发明变步长lms算法,解决了lms算法决收敛速率和稳定误差两者间的冲突,具有更好的收敛性、稳定性。
21、2.本发明提出一种全新的步长因子μ和误差信号e之间非线性函数关系式,避免的了指数运算,较大减小了计算量,充分发挥了lms算法计算量小的优点。
技术特征:
1.一种基于分式函数的有源消声系统变步长lms算法,其特征在于,在初始阶段选择大步长因子,进入收敛阶段后,选择小步长因子,采用非线性函数适应步长因子变化规则,其函数表达式如下:
2.根据权利要求1所述的基于分式函数的有源消声系统变步长lms算法,其特征在于,加入α、β、a三个参数调整函数,其中α控制函数底部形状,β控制函数的极值,a控制函数的开口大小,得到调整后的函数表达式如下:
3.根据权利要求2所述的基于分式函数的有源消声系统变步长lms算法,其特征在于,用e(n)和μ(n)分别来代替x和y,得到如下函数:
4.根据权利要求3所述的基于分式函数的有源消声系统变步长lms算法,其特征在于,所述变步长lms算法的表达式为:
5.根据权利要求4所述的基于分式函数的有源消声系统变步长lms算法,其特征在于,用仿真软件进行仿真,确定函数中α、β、a的值。
技术总结
本发明涉及一种基于分式函数的有源消声系统变步长LMS算法,在初始阶段选择大步长因子,进入收敛阶段后,选择小步长因子,采用非线性函数适应步长因子变化规则。本发明变步长LMS算法具有更好的收敛性、稳定性。
技术研发人员:郑中原,于金山,高建政,姜玲,张佳成,路菲,马伟刚,张滏恒
受保护的技术使用者:国网天津市电力公司电力科学研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!