一种基于颜色直方图距离的跟踪目标丢失检测方法及系统
本发明属于目标跟踪领域,具体涉及一种基于颜色直方图距离的跟踪目标丢失检测方法及系统。
背景技术:
1、随着计算机视觉技术的快速发展,其在军事和民用领域的应用也日益普及,目标跟踪技术作为计算机视觉应用的一个重要分支,在战场目标侦察、目标攻击锁定、监控场景特定目标跟踪等领域有着广泛的应用。
2、现阶段,在目标跟踪应用系统中,当出击跟踪目标消失、脱离视频视野、被障碍物遮挡等情况时,跟踪系统和算法会在最后目标出现的邻近范围搜索并错误定位至与目标最相似的对象。因此,通常情况下,目标跟踪系统需要监控和操作人员持续地用肉眼对场景进行观察监视,对目标丢失进行人工判别。
3、然而现有技术存在以下缺陷:1、缺少跟踪结果置信度机制或缺少结果置信度数据的持续分析和应用,无法对置信度数据中出现的异常值进行检测和利用,未建立起目标从跟踪初始、跟踪过程、跟踪丢失全周期的置信特征模型;2、当目标出现局部遮挡、短暂消失等情况时,传统目标跟踪算法会认为跟踪已经失败从而停止跟踪,造成系统可用性差;3、传统目标跟踪方法仅依靠跟踪算法中所用的特征进行搜索跟踪,效果较差。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了种基于颜色直方图距离的跟踪目标丢失检测方法及系统。本发明要解决的技术问题通过以下技术方案实现:
2、一种基于颜色直方图距离的跟踪目标丢失检测方法,包括:
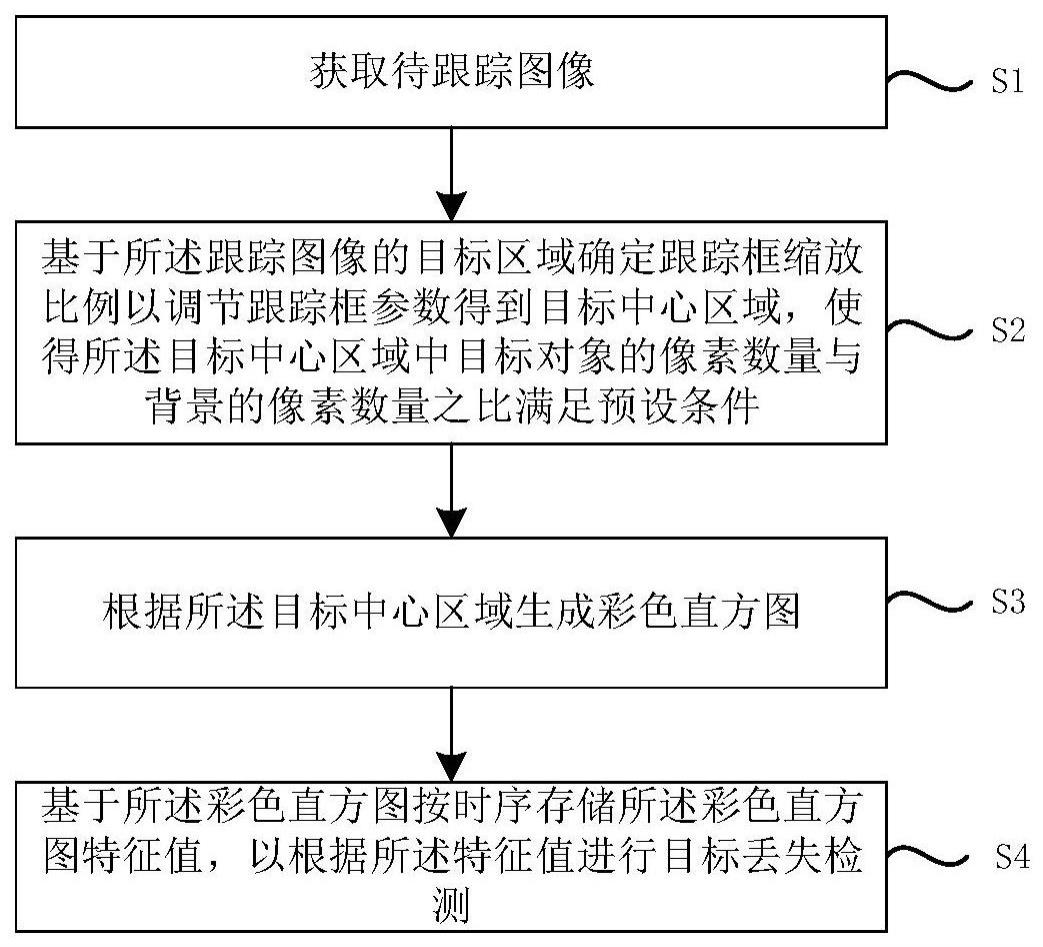
3、获取待跟踪图像,其中,所述待跟踪图像包括目标区域和背景区域;
4、基于所述跟踪图像的目标区域确定跟踪框缩放比例以调节跟踪框参数得到目标中心区域,使得所述目标中心区域中目标对象的像素数量与背景的像素数量之比满足预设条件;
5、根据所述目标中心区域生成彩色直方图;
6、基于所述彩色直方图按时序存储所述彩色直方图特征值,以根据所述特征值进行目标丢失检测;其中,所述跟踪框为矩形,所述跟踪框参数包括边长和旋转角度。
7、在一个具体实施方式中,根据所述特征值进行目标丢失检测,包括:
8、设置第一时间滑动窗、第二时间滑动窗、第三时间滑动窗;
9、将每个时间滑动窗内特征值的均值作为箱型图中位数q2,并计算箱型图的下四分位数q1、上四分位数q3以及四分位距iqr;
10、根据所述下四分位数q1、上四分位数q3以及四分位距iqr计算滑窗上限数和滑窗下限数,以根据所述滑窗上限数和滑窗下限数确定阈值范围;
11、根据第一时间滑动窗、第二时间滑动窗、第三时间滑动窗和异常阈值确定目标状态,其中,所述目标状态包括正常状态、局部遮挡状态、完全遮挡状态和丢失状态。
12、在一个具体实施方式中,根据第一时间滑动窗、第二时间滑动窗、第三时间滑动窗和异常阈值确定目标状态,包括:
13、当检测到第一时间滑动窗内特征值超出阈值范围且第二时间滑动窗和第三时间滑动窗内特征值未超出阈值范围时,确定所述目标状态为局部遮挡状态;
14、当检测到第一时间滑动窗和第二时间滑动窗内特征值超出阈值范围且第三时间滑动窗内特征值未超出阈值范围时,确定所述目标状态为完全遮挡状态;
15、当检测到第一时间滑动窗、第二时间滑动窗和第三时间滑动窗内特征值均超出阈值范围时,确定所述目标状态为丢失状态;
16、当检测到第一时间滑动窗、第二时间滑动窗和第三时间滑动窗内特征值均未超出阈值范围时,确定所述目标状态为正常状态。
17、在一个具体实施方式中,所述滑窗上限数=上四分位数q3+1.5×四分位距iqr;
18、所述滑窗下限数=下四分位数q1-1.5×四分位距iqr。
19、在一个具体实施方式中,所述彩色直方图包括yuv或rgb色彩空间。
20、本发明同时提供了一种基于颜色直方图距离的跟踪目标丢失检测系统,包括:
21、图像获取模块,用于获取待跟踪图像,其中,所述待跟踪图像包括目标区域和背景区域;
22、中心区域生成模块,用于基于所述跟踪图像的目标区域确定跟踪框缩放比例以调节跟踪框参数得到目标中心区域,使得所述目标中心区域中目标对象的像素数量与背景的像素数量之比满足预设条件;
23、彩色直方图生成模块,用于根据所述目标中心区域生成彩色直方图;
24、目标检测模块,用于基于所述彩色直方图按时序存储所述彩色直方图特征值,以根据所述特征值进行目标丢失检测;其中,所述跟踪框为矩形,所述跟踪框参数包括边长和旋转角度。
25、在一个具体实施方式中,所述目标检测模块包括:
26、滑动窗设置单元,用于设置第一时间滑动窗、第二时间滑动窗、第三时间滑动窗;
27、计算单元模块,用于将每个时间滑动窗内特征值的均值作为箱型图中位数q2,并计算箱型图的下四分位数q1、上四分位数q3以及四分位距iqr;
28、阈值范围确定单元,用于根据所述下四分位数q1、上四分位数q3以及四分位距iqr计算滑窗上限数和滑窗下限数,以根据所述滑窗上限数和滑窗下限数确定阈值范围;
29、状态检测单元,用于根据第一时间滑动窗、第二时间滑动窗、第三时间滑动窗和异常阈值确定目标状态,其中,所述目标状态包括正常状态、局部遮挡状态、完全遮挡状态和丢失状态。
30、在一个具体实施方式中,所述状态检测单元具体用于:
31、当检测到第一时间滑动窗内特征值超出阈值范围且第二时间滑动窗和第三时间滑动窗内特征值未超出阈值范围时,确定所述目标状态为局部遮挡状态;
32、当检测到第一时间滑动窗和第二时间滑动窗内特征值超出阈值范围且第三时间滑动窗内特征值未超出阈值范围时,确定所述目标状态为完全遮挡状态;
33、当检测到第一时间滑动窗、第二时间滑动窗和第三时间滑动窗内特征值均超出阈值范围时,确定所述目标状态为丢失状态;
34、当检测到第一时间滑动窗、第二时间滑动窗和第三时间滑动窗内特征值均未超出阈值范围时,确定所述目标状态为正常状态。
35、在一个具体实施方式中,所述滑窗上限数=上四分位数q3+1.5×四分位距iqr;
36、所述滑窗下限数=下四分位数q1-1.5×四分位距iqr。
37、本发明同时提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
38、存储器,用于存放计算机程序;
39、处理器,用于执行存储器上所存放的程序时,实现上述基于颜色直方图距离的跟踪目标丢失检测方法的步骤。
40、本发明的有益效果:
41、1、本发明的基于颜色直方图距离的跟踪目标丢失检测方法通过选取目标中心局部范围,构建颜色直方图特征值,建立特征值时间序列,结合异常值数据分析方法,从而能够准确检测异常特征值的出现提高目标跟踪算法及应用系统的长时工作可靠性和智能化水平;
42、2、本发明的基于颜色直方图距离的跟踪目标丢失检测方法可根据具体目标特征对该参数进行动态调整,缩小后的矩形框中目标对象的成分将远大于背景像素成分,确保后续的彩色直方图特征描述准确性;
43、3、本发明的基于颜色直方图距离的跟踪目标丢失检测方法采用多箱形图检测法,并且采用三种不同长度的时间滑动窗,从而能够满足不同工作场景需求,实用性更强,能够提高目标跟踪算法的稳定性。
44、以下将结合附图及实施例对本发明做进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!