一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法
1.本发明涉及梁式桥参数优化领域,特别是涉及一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法。
背景技术:
2.梁式桥多采用钢筋砼建造而成,具有工业化施工、耐久性好、大量节约钢材、适应性强且整体性好的优点,是桥梁建筑中最为广泛的结构形式,在交通运输业具有重要作用。传统梁式桥设计优化多采用经验结合设计软件的方式开展,结构参数选择随机性强,其设计结果通常并非处于最优状态且设计过程耗时费力;此外,桥梁结构参数设计多基于静力学理论及安全系数考虑桥梁内力、剪力及变形等因素,而桥梁实际服役过程往往受到动态载荷作用,其上行驶的车辆由于桥梁受载变形及路面不平度原因产生振动,改变桥上动态载荷,加剧桥梁振动,设计工况与实际工况存在差异,影响设计结果可靠性。针对前述动态载荷问题,应用商业软件建立车桥耦合系统的数值模型已有诸多研究,但存在模型参数化复杂、不便同智能优化算法结合以及求解耗时等缺点;同时,理论模型将实际结构假设为简支梁未能考虑桥梁扭转以及车辆载荷空间分布特点,使车桥耦合响应计算可靠性差。进一步的,基于空间车桥耦合响应实现车桥系统参数智能优化亦未有报道。
3.为了解决上述问题,本发明提出了一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法,该方法将促进车桥耦合振动控制技术发展,实现桥梁参数高效优化,改善桥梁设计效率及可靠性,为桥梁设计优化提供理论支撑,填补相关技术空白,推动耦合动力学理论发展,同时具有较大的社会效益与经济效益。
技术实现要素:
4.为克服现有技术不足,填补相关技术空白,本发明提供了一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法,本发明解决其技术问题所采用的技术方案如下:一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法,其特征在于包括以下步骤:步骤(1):推导车辆振动方程,构建车辆振动模型,采用集中质量法简化车辆模型,简化后车辆振动包括簧载质量垂直振动xv,俯仰振动,前悬非簧载质量垂直振动x1,后悬非簧载质量垂直振动x2,前轮胎质量垂直振动x3,后轮胎质量垂直振动x4;对各质量进行受力分析有振动微分方程:
;式中,mv、m1、m2、和mw分别为簧载质量、前悬非簧载质量、后悬非簧载质量和轮胎质量,jv为簧载俯仰转动惯量,k
s1
、k
s2
、k
w1
和k
w2
分别为前悬刚度、后悬刚度、前轮刚度和后轮刚度,c
s1
、c
s2
、c
w1
和c
w2
分别为前悬阻尼、后悬阻尼、前轮胎阻尼和后轮胎阻尼,l1和l2分别为前悬和后悬到簧载质心的距离,f
g1
和f
g2
分别为车辆自重施加在前轮胎及后轮胎的作用力,r
w1
和r
w2
分别为桥面对前轮胎及后轮胎的作用力;进一步推导则有车辆振动模型:;步骤(2):构建空间桥梁动力学模型,采用四节点12自由度矩形薄板单元对目标梁式桥进行网格划分,进而基于单元质量矩阵、刚度矩阵及载荷向量集成空间桥梁质量矩阵mb、刚度矩阵kb及载荷向量fb,采用瑞丽阻尼构建空间桥梁阻尼矩阵cb,则可建立空间桥梁动力学模型:
;式中,为有限元标准单元集成方法,n为矩形薄板单元数量,和为瑞丽阻尼系数,、和表达式示如下:;式中,a、b、t、、e及u分别表示薄板单元的长度一半、宽度一半、厚度、材料密度、弹性模量及泊松比;步骤(3):构建时域相关随机路面激励模型,由下式计算:;式中,r1和r2分别为前轮和后轮受到的时域相关随机路面激励;v为车辆行驶速度;nq和n0分别为下截止频率和空间参考频率;gq(n0)为路面不平度系数;为功率强度为0.5的白噪声;td为前轮到后轮距离与车速的比值;步骤(4):构建空间车桥耦合动力学模型,当某车轮行驶于桥面时,车轮垂直位移yw与桥面垂直位移yb关系可表示为:;考虑多车轮作用则,则有如下轮-桥位移关系:
;式中,a为车辆行驶加速度,nb为车轮载荷对桥上所有节点形成的形函数矩阵,r为所有车轮受到的路面激励,表示为下式:;式中,j为车轮载荷数量;进一步将轮-桥位移关系及步骤(2)所述的空间桥梁动力学模型代入步骤(1)所述的车辆振动模型则有:;式中,;步骤(5):确定空间耦合系统优化目标函数及优化变量,优化目标函数f(x)可表示为下式:;式中,f1(x)和f2(x)分别为优化目标函数1及优化目标函数2,q1(t)和q1(t)分别表示桥梁跨中位移和车辆簧载振动的时域响应,nn表示时域信号总点数,x为优化变量,表示为:;式中,x1及x2分别为车辆前悬刚度及阻尼,x3及x4分别为车辆后悬刚度及阻尼;x5、x6及x7分别为桥梁弹性模量、桥梁等效厚度及单位体积质量;步骤(6):进行智能优化算法与耦合动力学模型集成,在matlab软件中对步骤(4)所述的空间车桥耦合动力学模型及步骤(5)所述的优化目标函数及优化变量进行程序化,建立fitness.m函数文件,通过调用fitness.m函数文件后可输出步骤(5)所述优化目标函数f1(x)和优化目标函数f2(x);然后在matlab优化工具箱,选择多目标遗传算法,在目标函数栏输入@fitness,进而实现智能优化算法与耦合动力学模型集成;
步骤(7):进行智能算法驱动迭代寻优,在步骤(7)所述优化工具箱中定义优化变量的优化区间、种群规模及迭代次数,利用所述智能算法将产生的优化变量赋值到所述空间车桥耦合动力学模型,驱动所述空间车桥耦合动力学模型计算得到所述优化目标函数f1(x)和优化目标函数f2(x)的数值指标,重复多次计算,得到多组解集,在其中选择所述优化目标函数f1(x)和优化目标函数f2(x)的数值同时最小的解作为优化结果。
5.与现有技术相比,本发明的有益效果:该方法克服现有车桥耦合动力学理论模型简支梁处理忽略桥梁扭转影响计算准确性的不足,避免传统桥梁设计过程中结构参数人工选择导致的经验性问题,提供一种基于空间车桥耦合理论模型及智能优化算法实现桥梁参数高效优化将改善桥梁设计效率及可靠性,为桥梁优化设计提供理论支撑,具有非常广阔的工程应用前景,既可以填补相关技术空白,又可产生较大的社会效益与经济效益。
附图说明
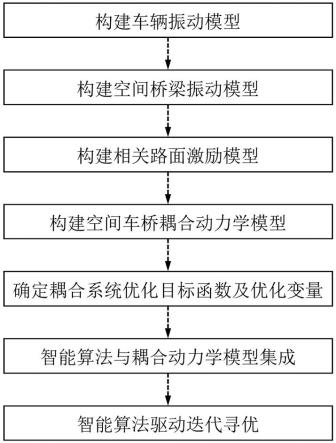
6.图1是优化方法的实施流程图;图2是车辆振动模型示意图;图3是薄板单元示意图;图4是桥梁薄板化有限元图;图5是优化方法的优化步骤图;图6(a)为优化前后桥梁跨中位移时域响应对比;图6(b)为优化前后车辆簧载振动加速度时域响应对比。
具体实施方式
7.参考附图描述本发明的实施方式,下面结合图1—图6对本发明具体实施方式进行详细说明。
8.参照图1,一种基于空间车辆-桥梁耦合响应的梁式桥参数优化方法,包括如下步骤:步骤(1):推导车辆振动方程,构建车辆振动模型,采用集中质量法简化车辆模型,如图2所示;简化后车辆振动包括簧载质量垂直振动xv,俯仰振动,前悬非簧载质量垂直振动x1,后悬非簧载质量垂直振动x2,前轮胎质量垂直振动x3,后轮胎质量垂直振动x4;对各质量进行受力分析且运用牛顿第二定律则有振动微分方程:;式中,mv、m1、m2、和mw分别为簧载质量、前悬非簧载质量、后悬非簧载质量和轮胎质量,jv为簧载俯仰转动惯量,k
s1
、k
s2
、k
w1
和k
w2
分别为前悬刚度、后悬刚度、前轮刚度和后轮刚度,c
s1
、c
s2
、c
w1
和c
w2
分别为前悬阻尼、后悬阻尼、前轮胎阻尼和后轮胎阻尼,l1和l2分别为前
悬和后悬到簧载质量质心的距离,f
g1
和f
g2
分别为车辆自重施加在前轮胎及后轮胎的作用力,r
w1
和r
w2
分别为桥面对前轮胎及后轮胎的作用力;进一步推导则有车辆振动模型:;步骤(2):构建空间桥梁动力学模型,采用图3所示四节点12自由度矩形薄板单元对目标梁式桥进行网格划分,划分结果如图4所示,进而基于单元质量矩阵、刚度矩阵及载荷向量集成空间桥梁质量矩阵mb、刚度矩阵kb及载荷向量fb,采用瑞丽阻尼构建空间桥梁阻尼矩阵cb,则可建立空间桥梁动力学模型:;式中,为有限元标准单元集成方法,n为矩形薄板单元数量,和为瑞丽阻尼系数,、和表达式示如下:
;式中,a、b、t、、e及u分别表示薄板单元的长度一半、宽度一半、厚度、材料密度、弹性模量及泊松比;步骤(3):构建时域相关随机路面激励模型,时域相关随机路面激励模型由下式计算:;式中,r1和r2分别为前轮和后轮受到的时域相关随机路面激励;v为车辆行驶速度;nq和n0分别为下截止频率和空间参考频率;gq(n0)为路面不平度系数;为功率强度为0.5的白噪声;td为前轮到后轮距离与车速的比值;步骤(4):构建空间车桥耦合动力学模型,当某车轮行驶于桥面时,车轮垂直位移yw与桥面垂直位移yb关系可表示为:;考虑多车轮作用则,则有如下轮-桥位移关系:;式中,a为车辆行驶加速度,nb为车轮载荷对桥上所有节点形成的形函数矩阵,r为
所有车轮受到的路面激励,表示为下式:;式中,j为车轮载荷数量;进一步将轮-桥位移关系及步骤(2)所述的空间桥梁动力学模型代入步骤(1)所述的车辆振动模型则有:;式中,步骤(5):确定空间耦合系统优化目标函数及优化变量,优化目标函数f(x)可表示为下式:;式中,f1(x)和f2(x)分别为优化目标函数1及优化目标函数2,q1(t)和q1(t)分别表示桥梁跨中位移和车辆簧载振动的时域响应,nn表示时域信号总点数,x为优化变量,可表示为:;式中,x1及x2分别为车辆前悬刚度及阻尼,x3及x4分别为车辆后悬刚度及阻尼;x5、 x6及x7分别为桥梁弹性模量、桥梁等效厚度及单位体积质量;步骤(6):进行智能优化算法与耦合动力学模型集成,在matlab软件中对步骤(4)所述的空间车桥耦合动力学模型及步骤(5)所述的优化目标函数及优化变量进行程序化,建立fitness.m函数文件,通过调用fitness.m函数文件后可输出步骤(5)所述优化目标函数f1(x)和优化目标函数f2(x);然后在matlab优化工具箱,选择多目标遗传算法,在目标函数栏输入@fitness,进而实现智能优化算法与耦合动力学模型集成;步骤(7):进行智能算法驱动迭代寻优,优化计算过程如图(5)所示,在步骤(6)所述优化工具箱中定义优化变量的优化区间、种群规模及迭代次数,利用所述智能算法将产生的优化变量赋值到所述空间车桥耦合动力学模型,驱动所述空间车桥耦合动力学模型计算得到所述优化目标函数f1(x)和优化目标函数f2(x)的数值指标,重复多次计算,得到多组解集,在其中选择所述优化目标函数f1(x)和优化目标函数f2(x)的数值同时最小的解作为
优化结果;通过本发明所提优化方法可以快速高效求得空间车辆载荷作用下最优桥梁参数,图6(a)为优化前后桥梁跨中位移时域响应对比,图6(b)为优化前后车辆簧载振动加速度时域响应对比。
9.以上所述,仅是发明的较佳实施方式,并非对本发明做任何限制,凡是根据本发明实质对以上实施方式所作的任何修改、变更以及等效变化,均仍属于本发明技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1