筛网自动焊接轨迹点检测方法及装置
本发明涉及人工智能的图像处理,具体涉及筛网自动焊接轨迹点检测方法及装置。
背景技术:
1、目前常见的筛网自动焊接系统主要在对筛网的固定定位模块化、用于根据定位进行焊接操作的机器人焊接子系统和用于识别焊接点并进行定位的2d视觉子系统。该系统需要在固定的模块化,通常需要对筛网进行统一固定、夹紧,因此对于筛网的类型、结构要求较高;在基于图像数据识别的焊接点受可见光光源的亮暗程度影响,因此,在较暗的夜晚基于2d相机视觉检测会失效。因此,现有技术还需要改进。
技术实现思路
1、本发明提供一种筛网自动焊接轨迹点检测方法及装置,能够基于点云投影变换进行焊点识别且全程无需人工干预。
2、第一方面,本发明提供了一种筛网自动焊接轨迹点检测方法,所述方法包括:
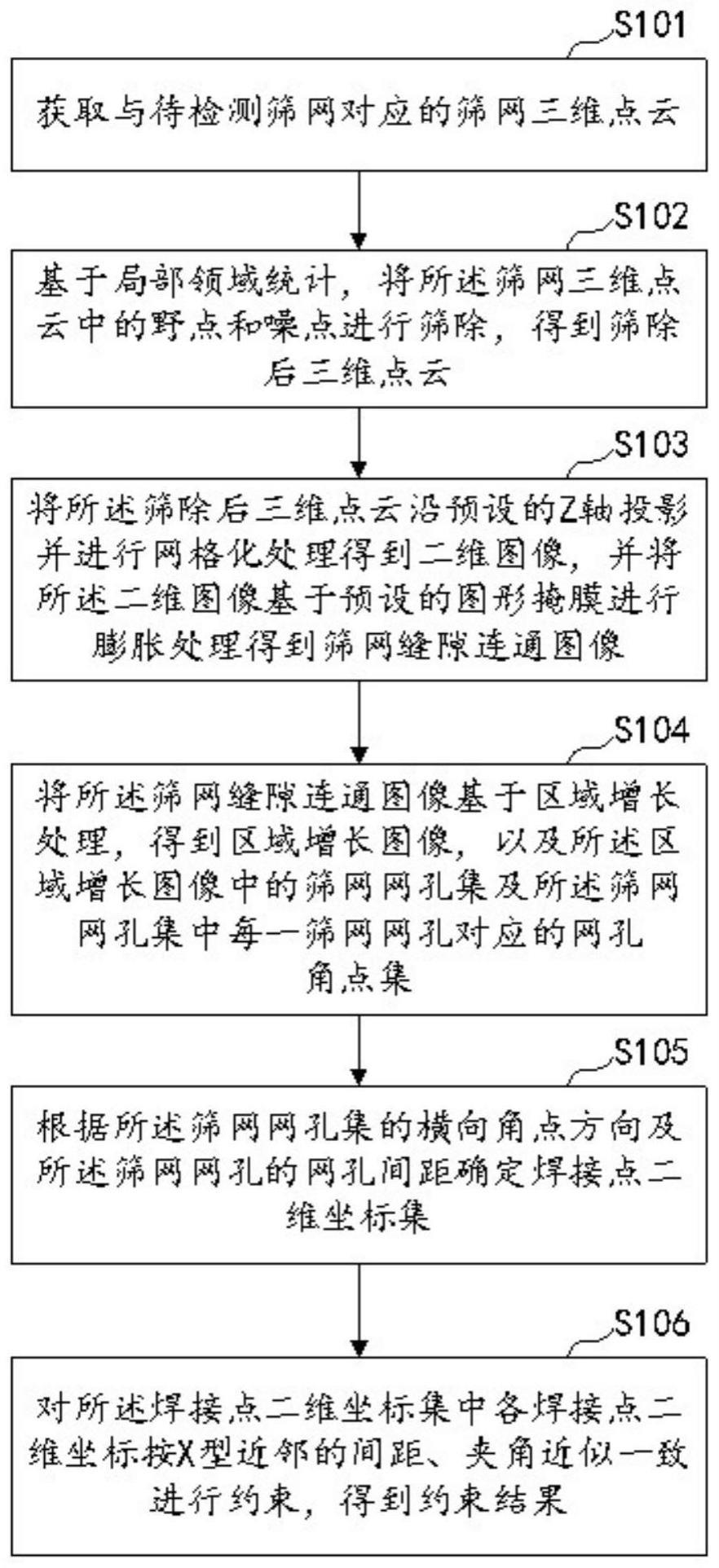
3、获取与待检测筛网对应的筛网三维点云;
4、基于局部领域统计,将所述筛网三维点云中的野点和噪点进行筛除,得到筛除后三维点云;
5、将所述筛除后三维点云沿预设的z轴投影并进行网格化处理得到二维图像,并将所述二维图像基于预设的图形掩膜进行膨胀处理得到筛网缝隙连通图像;
6、将所述筛网缝隙连通图像基于区域增长处理,得到区域增长图像,以及所述区域增长图像中的筛网网孔集及所述筛网网孔集中每一筛网网孔对应的网孔角点集;
7、根据所述筛网网孔集的横向角点方向及所述筛网网孔的网孔间距确定焊接点二维坐标集;
8、对所述焊接点二维坐标集中各焊接点二维坐标按x型近邻的间距、夹角近似一致进行约束,得到约束结果。
9、第二方面,本发明还提供一种筛网自动焊接轨迹点检测装置,所述筛网自动焊接轨迹点检测装置包括:
10、三维点云获取模块,用于获取与待检测筛网对应的筛网三维点云;
11、三维点云筛除模块,用于基于局部领域统计,将所述筛网三维点云中的野点和噪点进行筛除,得到筛除后三维点云;
12、二维投影模块,用于将所述筛除后三维点云沿预设的z轴投影并进行网格化处理得到二维图像,并将所述二维图像基于预设的图形掩膜进行膨胀处理得到筛网缝隙连通图像;
13、筛网网孔获取模块,用于将所述筛网缝隙连通图像基于区域增长处理,得到区域增长图像,以及所述区域增长图像中的筛网网孔集及所述筛网网孔集中每一筛网网孔对应的网孔角点集;
14、焊接点识别模块,用于根据所述筛网网孔集的横向角点方向及所述筛网网孔的网孔间距确定焊接点二维坐标集;
15、焊接点核对模块,用于对所述焊接点二维坐标集中各焊接点二维坐标按x型近邻的间距、夹角近似一致进行约束,得到约束结果。
16、第三方面,本发明还提供了一种处理设备,包括处理器和存储器,存储器中存储有计算机程序,处理器调用存储器中的计算机程序时执行本申请实施例提供的任一种筛网自动焊接轨迹点检测方法中的步骤。
17、第四方面,本发明还提供了一种计算机可读存储介质,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本申请实施例提供的任一种筛网自动焊接轨迹点检测方法中的步骤。
18、从以上内容可得出,本发明基于三维点云的二维投影变换实现了对待检测筛网中筛网网孔集的获取,并基于筛网网孔集中各筛网网孔的角点集确定焊接点二维坐标,全程自动执行,无需人为干预,提高了定位待检测筛网中焊接点的效率。
技术特征:
1.一种筛网自动焊接轨迹点检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述将所述筛除后三维点云沿预设的z轴投影并进行网格化处理得到二维图像,包括:
3.根据权利要求1所述的方法,其特征在于,所述将所述筛网缝隙连通图像基于区域增长处理,得到区域增长图像,以及所述区域增长图像中的筛网网孔集及所述筛网网孔集中每一筛网网孔对应的网孔角点集,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述筛网网孔集的横向角点方向及所述筛网网孔的网孔间距确定焊接点二维坐标集,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于局部领域统计,将所述筛网三维点云中的野点和噪点进行筛除,得到筛除后三维点云,包括:
6.一种筛网自动焊接轨迹点检测装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述二维投影模块用于:
8.根据权利要求6所述的装置,其特征在于,所述筛网网孔获取模块用于:
9.一种处理设备,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时执行如权利要求1至5任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1至5任一项所述的方法。
技术总结
本发明提供筛网自动焊接轨迹点检测方法及装置,该方法包括:获取待检测筛网对应的筛网三维点云;基于局部领域统计,将筛网三维点云中的野点和噪点进行筛除得到筛除后三维点云;将其沿预设的Z轴投影并进行网格化处理得到二维图像,并将其进行膨胀处理得到筛网缝隙连通图像;将筛网缝隙连通图像基于区域增长处理,得到区域增长图像以及其中的筛网网孔集及每一筛网网孔对应的网孔角点集;根据筛网网孔集的横向角点方向及筛网网孔的网孔间距确定焊接点二维坐标集;对去中各焊接点二维坐标按X型近邻的间距、夹角近似一致进行约束得到约束结果。本发明能够基于各筛网网孔的角点集确定焊接点二维坐标,全程自动执行,提高定位焊接点的效率。
技术研发人员:李渭,干王杰,潘平吉
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!