叶菜种子精密育秧播种性能检测系统及其搭建方法
本发明涉及叶菜种子播种性能识别,具体涉及叶菜种子精密育秧播种性能检测系统的搭建方法,还涉及该方法搭建的叶菜种子精密育秧播种性能检测系统。
背景技术:
1、我国是农业大国,叶菜种植业迅速发展,成为叶菜生产的重要支柱。通过研究和生产实践,我国已基本掌握穴盘育苗技术,并将其成功应用于工厂化育苗生产中。穴盘育苗具有很多优点:(1)种子分播均匀,成苗率高;(2)穴盘中秧苗相对独立,能有效减少病虫害传播;(3)采用统一播种和管理方式,使得小苗生长发育一致,有利于提高叶菜种子品质和规模化生产。该方法对研究我国粮食稳定生产和保障粮食高产有重要的价值和意义。
2、随着我国农业的发展和我国精准扶贫政策的实施,我国穴盘育苗播种检测系统的发展迎来了新的契机,国家越来越重视研发高准确率、高集成程度的育苗播种检测设备,发展我国自主知识产权的高精度、低成本的穴盘播种检测系统也是我国农业实现现代化的必由之路。
3、精密播种器工作情况好坏将直接决定播种质量,由于现阶段播种器在设计过程中存在不足,播种过程会出现空穴或者重播的情况,对穴粒数的合格率、空穴率以及重播率的检测造成影响,从而后续需要继续实施空穴补种研究和播种机智能调控工作。当播种性能重播率高时,需要调整播种机参数等。
4、综上所述,本发明基于树莓派和轮廓算法、深度学习对叶菜种子进行智能化识别,对后续叶菜种子种植和播种性能研究提供有利条件。该研究通过轮廓检测算法实现秧穴定位及空穴秧穴检测,以及基于不同的深度学习网络框架构建叶菜种子播种量检测模型,并比较不同网络模型对叶菜种子播种量检测准确率的影响,构建出最优的叶菜种子播种性能识别模型。
技术实现思路
1、针对现有技术中存在的技术问题,本发明的目的是:提供叶菜种子精密育秧播种性能检测系统及其搭建方法,对后续叶菜种子种植和播种性能研究提供有利条件。
2、为了达到上述目的,本发明采用如下技术方案:
3、叶菜种子精密育秧播种性能检测系统的搭建方法,包括如下步骤:
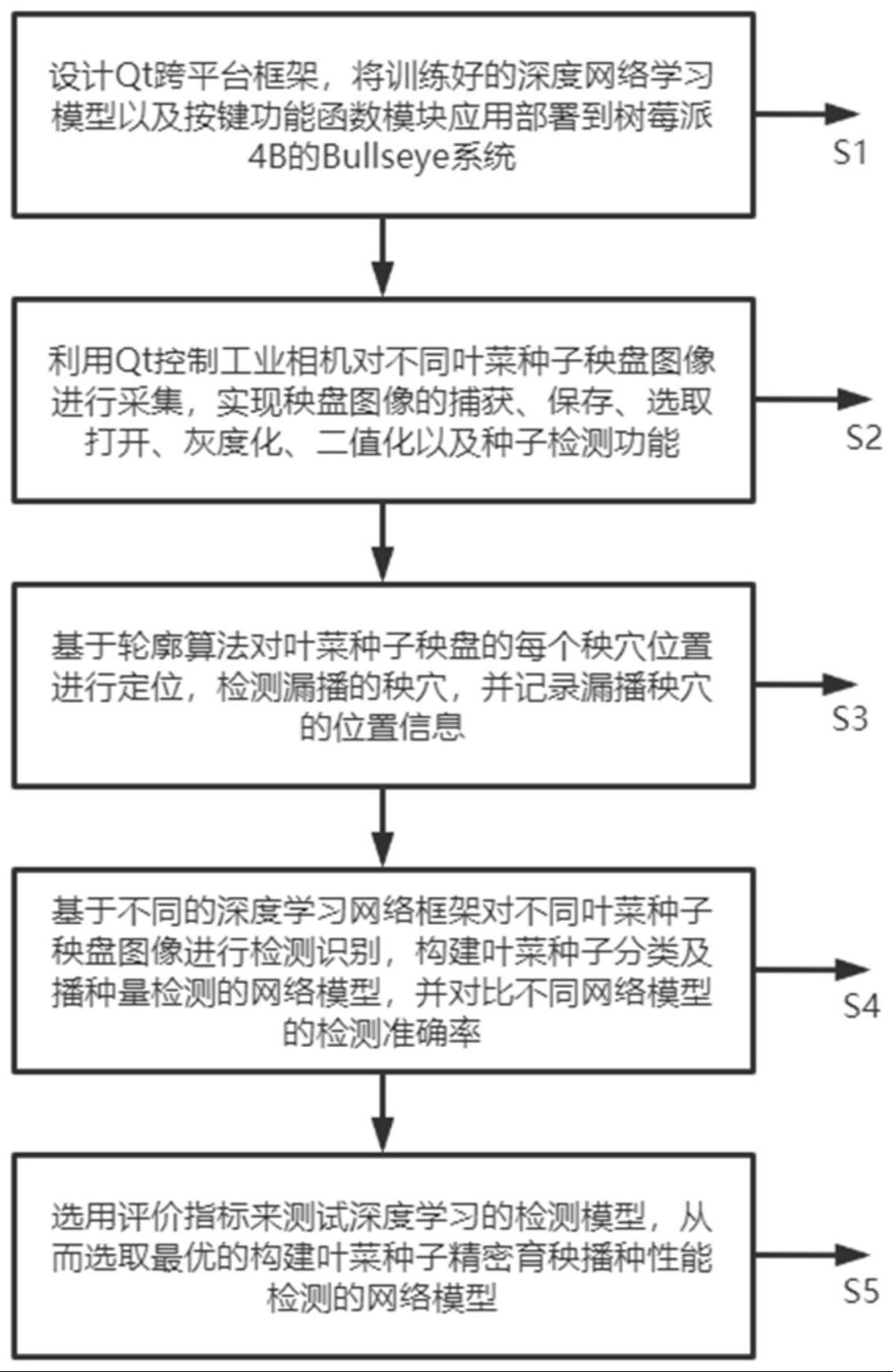
4、s1,设计qt跨平台框架,将训练好的深度学习网络模型以及按键功能函数模块应用部署到树莓派4b的bullseye系统;
5、s2,利用qt控制工业相机对不同叶菜种子秧盘图像进行采集,实现秧盘图像的捕获、保存、选取打开、灰度化、二值化以及种子检测功能;
6、s3,基于轮廓算法对叶菜种子秧盘的每个秧穴位置进行定位,检测漏播的秧穴,并记录漏播秧穴的位置信息;
7、s4,基于深度学习网络框架对不同叶菜种子秧盘图像进行检测识别,构建叶菜种子分类及播种量检测的网络模型,并对比不同网络模型的检测准确率;
8、s5,选用评价指标来测试深度学习网络模型,从而选取最优的构建叶菜种子精密育秧播种性能检测的网络模型,作为叶菜种子精密育秧播种性能检测系统。
9、作为一种优选,在步骤s1中,部署深度学习网络模型以及各按键功能函数模块到树莓派4b包括以下两步:
10、s11,在64位windows10系统上集成开发各功能模块;
11、s12,利用qt的creator完成gui界面设计,迁移到树莓派系统。
12、作为一种优选,在步骤s2中,利用pyqt来创建一个图形化界面,实现的功能包括:
13、s21,打开/关闭摄像头;点击“打开摄像头”按钮,弹出摄像头窗口,对不同叶菜种子秧盘图像进行拍摄。拍摄完成后,可点击“关闭摄像头”按钮。
14、s22,捕获图片;采用mer-1070-14u3c-l水星一代1000万像素彩色工业相机在距离秧盘上空50cm以垂直方向捕获不同叶菜种子秧盘图像,点击“捕获图片”按钮,捕获当前拍摄的秧盘图像。
15、s23,保存图片;选取捕获的不同叶菜种子秧盘图像,点击“保存图片”按钮,树莓派系统会自动弹出保存的文件,根据需求保存在指定文件中。
16、s24,打开图片;点击“打开图片”按钮,可以在树莓派系统的指定文件中获取所需的不同叶菜种子秧盘图像。
17、s25,灰度化;捕获秧盘图像后,点击“灰度化”按钮,qt图形化界面的结果图会显示不同叶菜种子秧盘的灰度化图像。
18、s26,二值化;对捕获的秧盘图像进行灰度化后,点击“二值化”按钮,qt图形化界面的结果图会显示不同叶菜种子秧盘的二值化图像。
19、s27,检测种子;点击“检测种子”按钮,树莓派系统会自动弹出保存的文件,根据需求选择指定文件中的秧盘图像,qt图形化界面的结果图会显示检测后的不同叶菜种子秧盘图像。为使检测结果更加清晰,增设detection界面显示检测结果图。
20、作为一种优选,在步骤s3中,基于opencv进行轮廓算法检测秧穴位置的过程包括:
21、s31,读取叶菜种子秧盘彩色图像,二值化处理;
22、s32,检测轮廓;
23、s33,轮廓分类;
24、s34,绘制轮廓;绘制红色框表示不含叶菜种子的秧穴位置,绘制绿色框表示含有叶菜种子的秧穴位置,绿色圆点表示叶菜种子;
25、s35,记录秧盘空穴的坐标位置,为后续补种装置提供补种位置信息。
26、作为一种优选,步骤s32包括:
27、s321,循环遍历叶菜种子秧盘图像,通过rgb数组找到像素点值不同的连续轮廓区域;
28、s322,从轮廓起点开始,沿着边界像素做标记;
29、s323,处理该轮廓后,从上个位置继续遍历,直到发现新轮廓,最后扫描检测出所有轮廓位置;
30、s324,存储所有检测出的轮廓列表结构,包括含有叶菜种子的秧穴,不含叶菜种子的秧穴和叶菜种子。
31、作为一种优选,步骤s33包括:
32、s331,叶菜种子一般较小,秧穴的轮廓比种子的轮廓大,所以选取阈值n,当轮廓列表像素点值大于n为秧穴轮廓,轮廓列表像素点值小于n为种子轮廓;
33、s332,检测到叶菜种子轮廓时,记录叶菜种子的坐标位置信息,并以该坐标为端点作一条射线,不具体生成;
34、s333,循环取秧穴轮廓的两个坐标位置,与叶菜种子坐标构成两个向量,如果两个向量外积为零,且内积小于或等于零,则叶菜种子位于秧穴轮廓上;
35、s334,重新调整两个向量,如果两个向量外积为正,且两个向量的终点位于射线两侧,则叶菜种子包含在秧穴轮廓里面。
36、作为一种优选,步骤s4包括:
37、s41,构建不同叶菜种子播种量数据集;
38、s42,选取深度学习网络,把训练集输入深度学习网络进行训练;
39、s43,把验证集和测试集输入训练好的播种量检测模型,对模型进行评价,并选取最优检测模型;
40、s44,把采集的叶菜种子播种图像输入播种量检测模型,获取每个秧穴的叶菜种子播种量。
41、作为一种优选,步骤s41包括:
42、s411,采集不同叶菜种子秧盘播种图像;
43、s412,对叶菜种子秧盘图像的种子进行标注,并用不同颜色的标注框标识不同的叶菜种子及数量;
44、s413,按照6:2:2的比例划分训练集、验证集和测试集。
45、作为一种优选,在步骤s5中,选用评价指标来测试深度学习的网络模型,采用准确率、精确率、召回率3个指标计算公式:
46、
47、
48、
49、式中:tp为正确检测叶菜种子分类及播种量的数量,fp为被错误检测叶菜种子分类及播种量的数量,fn为被错误检测为非此叶菜种子分类及播种量的数量,tn为正确检测非此叶菜种子的分类及播种量的数量。
50、叶菜种子精密育秧播种性能检测系统,通过叶菜种子精密育秧播种性能检测系统的搭建方法进行搭建。
51、本发明相对于现有技术具有如下优点:
52、本发明基于qt跨平台框架控制工业相机捕获秧盘图像,通过opencv进行轮廓检测,首先对采集的不同叶菜种子的秧盘彩色图像进行灰度化二值化处理,再对秧盘图像进行膨胀操作和闭运算过滤消除噪声,筛选出空穴位置,并输出空穴坐标位置信息。深度学习是直接对采集的不同叶菜种子的秧盘图像数据集进行训练,对不同算法得到的结果进行分析,通过比较取得最佳算法构建出最适合于叶菜种子播种性能智能化识别系统。其中,常用的检测方法有光电传感检测方法、高速摄影检测法等。光电传感检测方法难以实现高速排种的连续粒子流的小粒径种子的检测,更难适应多粒精密穴播种子数量的检测。高速摄影法一般用于机械式或气吸式的播种器,能获取种子播种过程的全部细节分析,但未能真实检测秧盘的播种量。可基于此,对不同种类的叶菜种子、不同的深度学习网络模型检测方式进行深入化的研究,并形成相应的智能化检测系统,若能应用于叶菜种子的生产,将能大大提高收益,对叶菜种子研究及应用具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!