一种基于高动态技术的图像缺陷分类方法及系统与流程
本技术涉及锂电池隔膜缺陷检测领域,尤其涉及一种基于高动态技术的图像缺陷分类方法及系统。
背景技术:
1、锂离子电池隔膜在锂离子电池中起到隔离正负极材料避免短路的作用,同时它允许锂离子通过来形成导电的回路。隔膜一般由基膜、陶瓷层和pvdf(聚偏二氟乙烯)颗粒层构成,隔膜生产有不同的工艺,最终成品一般呈多层分布。以喷涂工艺的料膜举例,双喷双涂料膜的构成是“pvdf喷涂颗粒层+陶瓷涂布层+基膜+陶瓷涂布层+pvdf喷涂颗粒层”,双喷单涂膜的构成是“pvdf喷涂颗粒层+陶瓷涂布层+基膜”。
2、在隔膜的使用过程,会因为其物理形态导致出现缺陷。其常见缺陷有针孔、划伤、亮点、漏涂、漏喷、黑点、蚊虫、脏污以及褶皱等。上述缺陷严重影响隔膜的使用,因此,对于锂电池来说,需要定期对锂离子电池隔膜进行缺陷的检测。
3、工业上对于锂电池隔膜的检测通常使用背光检测,该检测方式为透射明场成像。但是部分隔膜的透光率较高时,陶瓷涂层对隔膜的透光率影响会变大。此时的漏涂、亮点、划伤和针孔成像的灰度一致,均达到255dn的灰度,缺陷在形态上也无明显区别,所以,上述成像系统对漏涂、亮点和针孔的成像在尺寸和灰度上无明显差异,无法有效筛选真实缺陷,导致误报严重、生产效率低下。
技术实现思路
1、本技术实施例提供了一种基于高动态技术的图像缺陷分类方法及系统,以解决使用背光检测技术对于透光率较大的隔膜无法准确检测出缺陷的问题。
2、第一方面,本技术实施例提供了一种基于高动态技术的图像缺陷分类方法,所述方法包括:
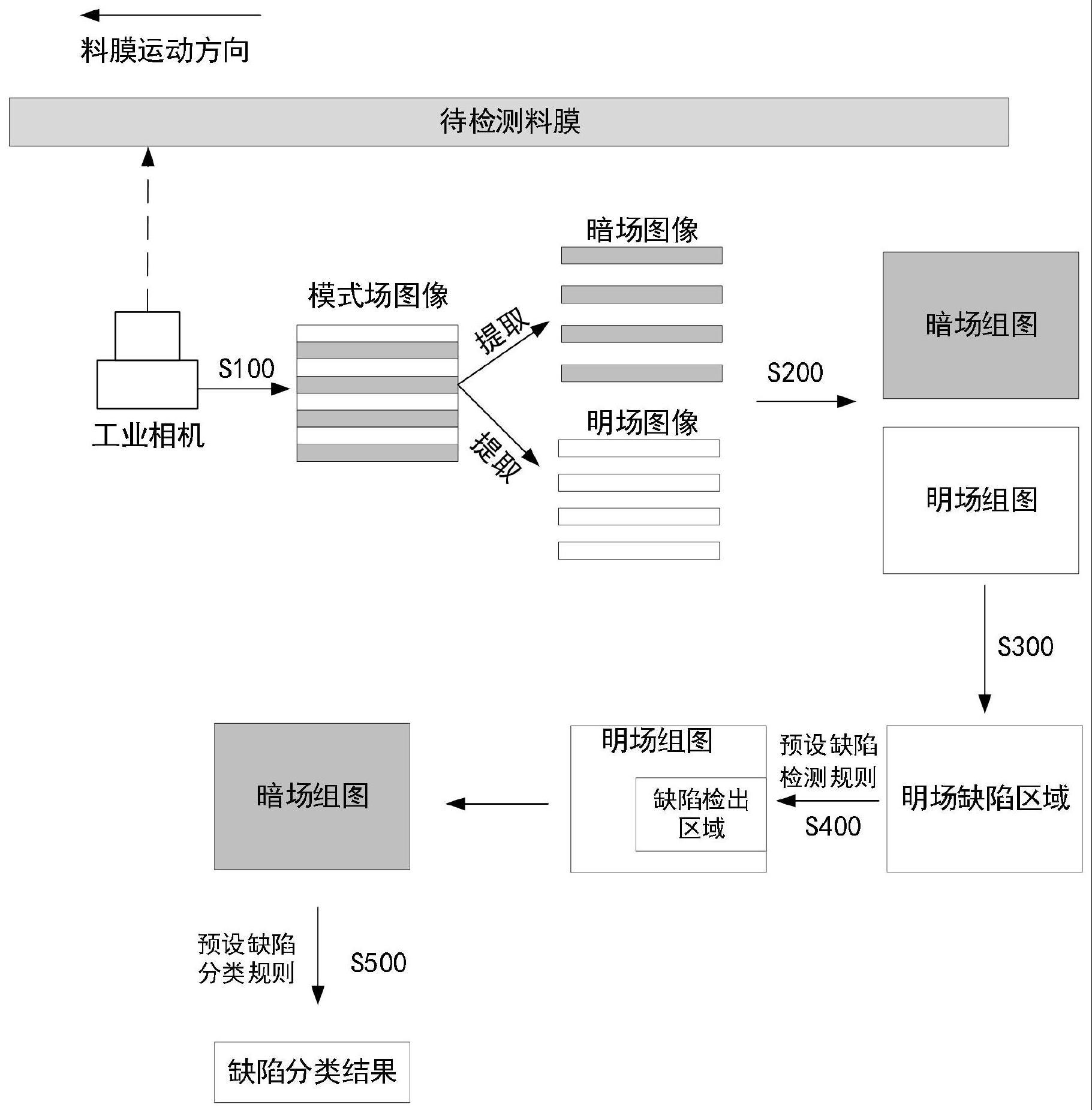
3、通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像;所述模式场图像包括若干相互交替明场图像和暗场图像;所述明场图像与所述暗场图像是在同一时间及同一位置采集的待检测料膜的图像,所述明场图像的背景灰度值大于所述暗场图像的背景灰度值;
4、从所述模式场图像中分别提取所述明场图像和所述暗场图像,并将所述明场图像拼接为明场组图以及将所述暗场图像拼接为暗场组图;
5、识别所述明场组图中的明场缺陷区域;
6、按照所述明场缺陷区域以及预设缺陷检测规则对所述明场组图进行缺陷检出,以得到缺陷检出区域;
7、按照所述缺陷检出区域以及预设缺陷分类规则对所述暗场组图进行缺陷分类,以得到缺陷分类结果。
8、在一些实施例中,如果所述待检测料膜为隔膜料膜,通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像的步骤中,所述方法还包括:
9、在将所述隔膜料膜固定在单向移动的载物台上以后,控制光源垂直向所述隔膜料膜进行打光;
10、使用与所述光源共线的所述工业相机捕捉所述隔膜料膜在处于移动状态时的模式场图像。
11、在一些实施例中,如果所述待检测料膜为极片料膜,通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像的步骤中,所述方法还包括:
12、在将所述极片料膜固定在单向移动的载物台上以后,控制光源向所述极片料膜进行打光;所述光源设置在与所述极片料膜的法线方向呈预设角度的位置;
13、根据所述预设角度计算所述光源对应的反射角度;
14、使用所述工业相机捕捉所述极片料膜在处于移动状态时的模式场图像;所述工业相机设置在所述反射角度的方向上。
15、在一些实施例中,所述方法还包括:
16、识别所述模式场图像中的模式场数量;
17、获取每个模式场的背景灰度值;
18、根据每个模式场的背景灰度值设置所述工业相机对于每个模式场的曝光时长;
19、统计所有的曝光时长得到所述工业相机的曝光总时长。
20、在一些实施例中,所述方法还包括:
21、控制频闪光源对待检测料膜进行打光;
22、对每个所述模式场设置相同的曝光时长;
23、根据所述模式场数量确定所述频闪光源的频闪次数,根据所述背景灰度值确定所述频闪光源的亮度;
24、根据所述曝光时长确定所述频闪光源的频闪时间;
25、通过所述工业相机采集频闪状态下的待检测料膜的图像。
26、在一些实施例中,分别提取所述明场图像和所述暗场图像的步骤中,所述方法还包括:
27、向所述工业相机输入脉冲信号;
28、在所述工业相机反馈响应于所述脉冲信号的回执信号之后,调取所述工业相机的图像采集卡;
29、根据所述脉冲信号设置所述图像采集卡的采集卡倍频;
30、根据所述图像采集卡的控制程序以及所述采集卡倍频将所述模式场图像裁剪为所述明场图像和所述暗场图像。
31、在一些实施例中,按照所述明场缺陷区域以及预设缺陷检测规则对所述明场组图进行缺陷检出的步骤中,所述方法包括:
32、识别所述明场缺陷区域的明场缺陷灰度值;
33、根据所述预设缺陷检测规则对所述明场缺陷灰度值进行比对,得到缺陷比对值;
34、如果所述缺陷比对值大于所述缺陷阈值,将所述缺陷比对值对应的图像区域标记为所述缺陷检出区域。
35、在一些实施例中,按照所述检出结果以及预设缺陷分类规则对所述暗场组图进行缺陷分类的步骤中,所述方法还包括:
36、根据所述缺陷检出区域,在所述暗场图像中确定暗场缺陷区域;
37、获取所述暗场缺陷区域的尺寸信息;
38、根据所述尺寸信息,计算所述暗场缺陷区域的长宽比例;
39、根据所述预设缺陷分类规则对所述长宽比例进行比对,得到缺陷分类结果。
40、在一些实施例中,通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像的步骤中,所述方法还包括:
41、使用工业线阵相机按照1:n的比例输出暗场图像和明场图像;其中,n为大于1的整数;
42、将n倍数量的明场图像合成为高动态明场图像。
43、第二方面,本技术提供了一种基于高动态技术的图像缺陷分类系统,所述系统包括缺陷检测模块,所述缺陷检测模块被配置为:
44、通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像;所述模式场图像包括若干相互交替明场图像和暗场图像;所述明场图像与所述暗场图像是在同一时间及同一位置采集的待检测料膜的图像,所述明场图像的背景灰度值大于所述暗场图像的背景灰度值;
45、从所述模式场图像中分别提取所述明场图像和所述暗场图像,并将所述明场图像拼接为明场组图以及将所述暗场图像拼接为暗场组图;
46、识别所述明场组图中的明场缺陷区域;
47、按照所述明场缺陷区域以及预设缺陷检测规则对所述明场组图进行缺陷检出,以得到缺陷检出区域;
48、按照所述缺陷检出区域以及预设缺陷分类规则对所述暗场组图进行缺陷分类,以得到缺陷分类结果。
49、由上述方案可知,本技术提供一种基于高动态技术的图像缺陷分类方法及系统,所述方法通过工业相机捕捉待检测料膜在处于移动状态时的模式场图像,其中,模式场图像包括若干相互交替明场图像和暗场图像。从模式场图像中分别提取明场图像和暗场图像,并将所述明场图像拼接为明场组图以及将所述暗场图像拼接为暗场组图,并识别所述明场组图中的明场缺陷区域,然后按照明场缺陷区域以及预设缺陷检测规则对明场组图进行缺陷检出,得到缺陷检出区域,最后按照缺陷检出区域以及预设缺陷分类规则对暗场组图进行缺陷分类,得到缺陷分类结果。本技术可以通过捕捉同一位置,同一时间拍摄的不同亮度的明场图像和暗场图像,并根据明场图像检出缺陷区域,根据暗场图像对缺陷分类,以达到更加准确的分类效果。
- 还没有人留言评论。精彩留言会获得点赞!